STM32
登录
直播中
郭大
10年用户
952经验值
擅长:嵌入式技术
私信
关注
[问答]
如何实现疯壳AI开源无人机遥控整机代码走读/编译与烧写?
开启该帖子的消息推送
无人机遥控器
如何实现疯壳AI开源无人机遥控整机代码走读/编译与烧写?
回帖
(1)
廖丽霞
2021-12-20 13:51:34
一、代码架构
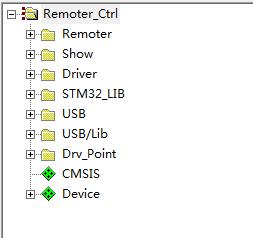
遥控的整体代码工程由7个工作组组成,分别是Remoter、show、Driver、STM32_LIB、USB、USB/Lib以及Drv_Point,如下图所示。
各个组的具体的代码功能如下表所示。
组
功能
Remoter
包含遥控器数据数据、摇杆按键处理等。
show
负责遥控器整体的显示菜单UI等代码实现
Driver
各个模块的底层驱动
STM32_LIB
STM32标准库
USB
USB相关
USB/Lib
USB库
Drv_Point
系统关键库
二、代码走读
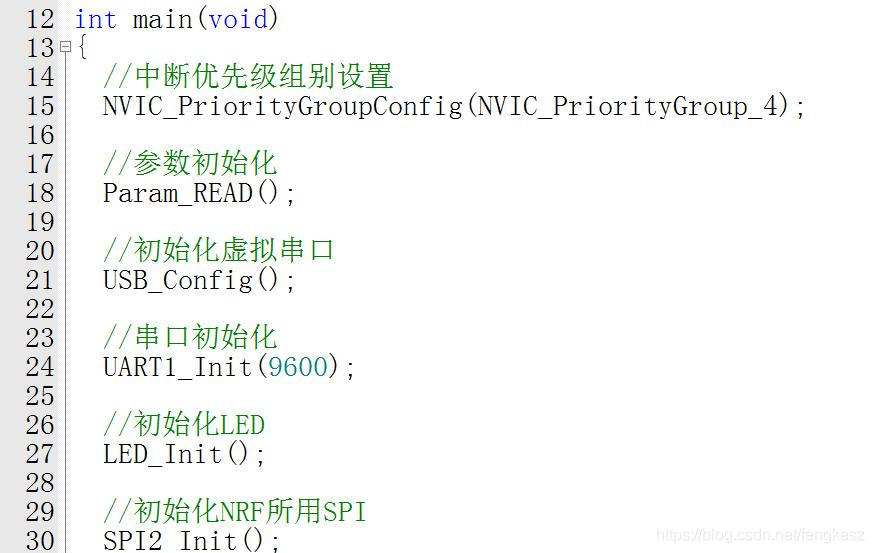
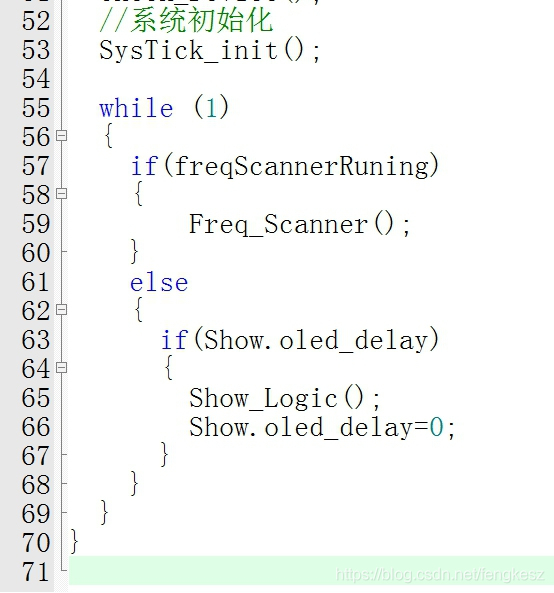
系统的主函数部分是整个代码的起始运行位置,在主函数内主要做三个事情:1、初始化外设及参数,2、轮询线程函数,3、菜单显示逻辑,其代码如下图所示。
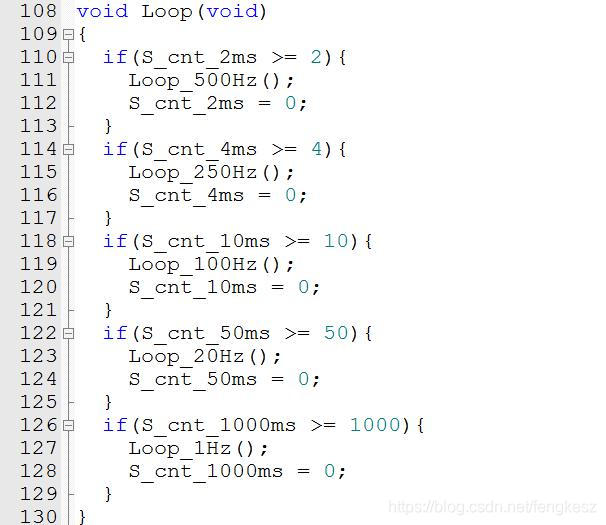
系统的每一个线程函数都已经分配好了运行周期,在不同的线程里执行不同的事情,线程的切换通过简单的逻辑处理形式切换,而系统的运行时间由sysTick提供,即系统的“滴答”时钟。各个线程的入口如下。
分别有1000ms周期的函数、50ms周期的函数、10ms周期的函数、4ms周期的函数以及2ms周期的函数。
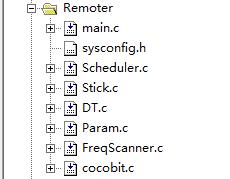
整个遥控器的逻辑处理、数据交换的核心部分均在Remoter工作组内,该组内的代码框架如下图所示。
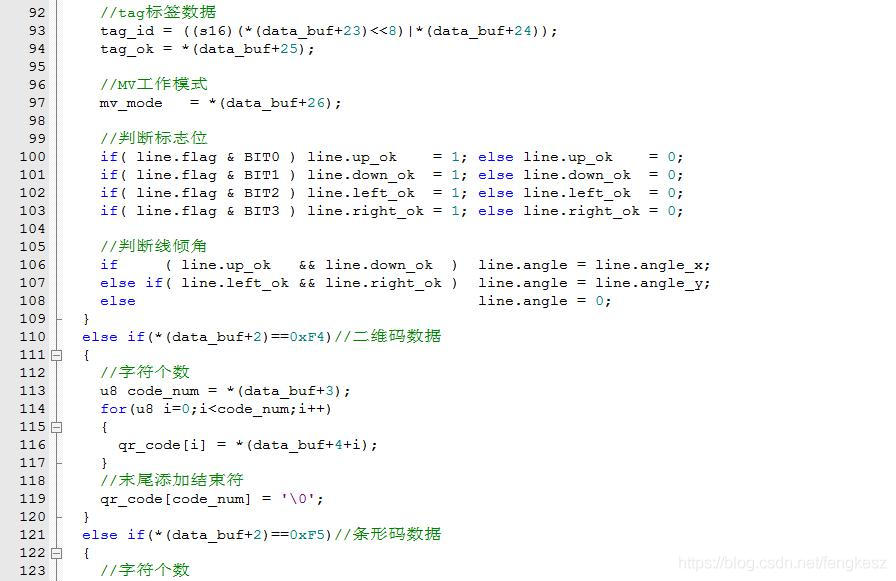
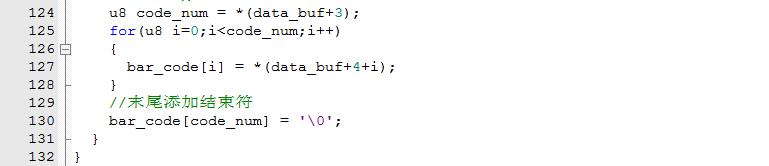
其中的DT.c负责和飞控、上位机等的通信数据处理,即拆解包、封装包、提取关键数据等,如下图所示为对飞控传输过来的数据进行处理。
其中Stick.c为摇杆逻辑处理,主要对摇杆采集到ADC值进行分析,判断需要执行的逻辑。最后的cocobit.c是负责和cocobit编程板之间的通信。
工作组“show”主要负责了整体的菜单UI显示,这里已经做了封装处理。
工作组“Driver”负责各个模块的底层驱动,例如摇杆ADC配置、NRF24L01的SPI驱动等。
工作组“USB”以及“USB/Lib”,负责通过STM32自带的USB,虚拟出串口,方便与上位机进行通信。
保存、编译最后把代码烧写的遥控中,配合飞控就可以正常使用了。如下图所示1为保存、2为编译、3为下载烧写。
一、代码架构
遥控的整体代码工程由7个工作组组成,分别是Remoter、show、Driver、STM32_LIB、USB、USB/Lib以及Drv_Point,如下图所示。
各个组的具体的代码功能如下表所示。
组
功能
Remoter
包含遥控器数据数据、摇杆按键处理等。
show
负责遥控器整体的显示菜单UI等代码实现
Driver
各个模块的底层驱动
STM32_LIB
STM32标准库
USB
USB相关
USB/Lib
USB库
Drv_Point
系统关键库
二、代码走读
系统的主函数部分是整个代码的起始运行位置,在主函数内主要做三个事情:1、初始化外设及参数,2、轮询线程函数,3、菜单显示逻辑,其代码如下图所示。
系统的每一个线程函数都已经分配好了运行周期,在不同的线程里执行不同的事情,线程的切换通过简单的逻辑处理形式切换,而系统的运行时间由sysTick提供,即系统的“滴答”时钟。各个线程的入口如下。
分别有1000ms周期的函数、50ms周期的函数、10ms周期的函数、4ms周期的函数以及2ms周期的函数。
整个遥控器的逻辑处理、数据交换的核心部分均在Remoter工作组内,该组内的代码框架如下图所示。
其中的DT.c负责和飞控、上位机等的通信数据处理,即拆解包、封装包、提取关键数据等,如下图所示为对飞控传输过来的数据进行处理。
其中Stick.c为摇杆逻辑处理,主要对摇杆采集到ADC值进行分析,判断需要执行的逻辑。最后的cocobit.c是负责和cocobit编程板之间的通信。
工作组“show”主要负责了整体的菜单UI显示,这里已经做了封装处理。
工作组“Driver”负责各个模块的底层驱动,例如摇杆ADC配置、NRF24L01的SPI驱动等。
工作组“USB”以及“USB/Lib”,负责通过STM32自带的USB,虚拟出串口,方便与上位机进行通信。
保存、编译最后把代码烧写的遥控中,配合飞控就可以正常使用了。如下图所示1为保存、2为编译、3为下载烧写。
举报
更多回帖
rotate(-90deg);
回复
相关问答
无人机遥控器
疯
壳
AI
开源
无人机
开机测试及硬件资源汇总,绝对实用
2021-12-20
3293
无人机
的工作原理
2021-01-13
4669
大家觉得
无人机
做防水的技术难度怎么样?
2018-01-06
4042
无人机
超出
遥控
距离会怎么样
2019-08-27
13951
把脉植保
无人机
市场? 看大家怎么说
2020-05-12
1397
无人机
那么多,如何诱捕一台
无人机
?
2015-06-05
16959
Crazepony1
无人机
程序源码该如何去
实现
呢
2021-12-17
1710
无人机
GPS模块的作用是什么
2020-12-16
7189
无人机
流行和快速增长背后,对
无人机
开发平台了解多少?
2019-02-21
4240
无人机
租赁服务成发展新方向
2020-08-20
3413
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分






 举报
举报



