超声波避障代码
#include "sys.h"
#include "delay.h"
#define EN1 PAout(2) //L293D控制管脚定义
#define IN1 PAout(3) //L293D控制管脚定义
#define IN2 PAout(4) //L293D控制管脚定义
#define EN2 PAout(7) //L293D控制管脚定义
#define IN3 PAout(6) //L293D控制管脚定义
#define IN4 PAout(5) //L293D控制管脚定义
#define BEEP PBout(5) //蜂鸣器控制管脚定义
#define KEY1 PAin(8) //功能按键对应的管脚
#define BZ_LEFT PAin(13) //左边避障信号
#define BZ_RIGHT PAin(14) //右边避障信号
#define ControlPort PAout(0) //舵机控制接口
#define Stop 0 //舵机停标志
#define Right 1 //舵机右转标志
#define Left 2 //舵机左转标志
#define OLED_RST_Clr() PCout(13)=0 //RST
#define OLED_RST_Set() PCout(13)=1 //RST
#define OLED_RS_Clr() PBout(4)=0 //DC
#define OLED_RS_Set() PBout(4)=1 //DC
#define OLED_SCLK_Clr() PCout(15)=0 //SCL
#define OLED_SCLK_Set() PCout(15)=1 //SCL
#define OLED_SDIN_Clr() PCout(14)=0 //SDA
#define OLED_SDIN_Set() PCout(14)=1 //SDA
#define OLED_CMD 0 //写命令
#define OLED_DATA 1 //写数据
u32 JuLi; //超声波测距
u8 pwmval_left = 0; //左电机调速变量
u8 pwmval_right = 0; //右电机调速变量
u8 pwmval_left_init = 6; //左电机速度值
u8 pwmval_right_init = 6; //右电机速度值
u8 right_pwm = 1; //左电机调速开关
u8 left_pwm = 1; //右电机调速开关
u8 TimeOutCounter = 0;
u8 LeftOrRight = 0;
u16 timer = 0;
u8 hw_flag;
u32 S_temp;
u8 OLED_GRAM[128][8];
const unsigned char oled_asc2_1206[95][12]={
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",0*/
{0x00,0x00,0x00,0x00,0x3F,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*"!",1*/
{0x00,0x00,0x30,0x00,0x40,0x00,0x30,0x00,0x40,0x00,0x00,0x00},/*""",2*/
{0x09,0x00,0x0B,0xC0,0x3D,0x00,0x0B,0xC0,0x3D,0x00,0x09,0x00},/*"#",3*/
{0x18,0xC0,0x24,0x40,0x7F,0xE0,0x22,0x40,0x31,0x80,0x00,0x00},/*"$",4*/
{0x18,0x00,0x24,0xC0,0x1B,0x00,0x0D,0x80,0x32,0x40,0x01,0x80},/*"%",5*/
{0x03,0x80,0x1C,0x40,0x27,0x40,0x1C,0x80,0x07,0x40,0x00,0x40},/*"&",6*/
{0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"'",7*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x80,0x20,0x40,0x40,0x20},/*"(",8*/
{0x00,0x00,0x40,0x20,0x20,0x40,0x1F,0x80,0x00,0x00,0x00,0x00},/*")",9*/
{0x09,0x00,0x06,0x00,0x1F,0x80,0x06,0x00,0x09,0x00,0x00,0x00},/*"*",10*/
{0x04,0x00,0x04,0x00,0x3F,0x80,0x04,0x00,0x04,0x00,0x00,0x00},/*"+",11*/
{0x00,0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*",",12*/
{0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x00,0x00},/*"-",13*/
{0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*".",14*/
{0x00,0x20,0x01,0xC0,0x06,0x00,0x38,0x00,0x40,0x00,0x00,0x00},/*"/",15*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"0",16*/
{0x00,0x00,0x10,0x40,0x3F,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"1",17*/
{0x18,0xC0,0x21,0x40,0x22,0x40,0x24,0x40,0x18,0x40,0x00,0x00},/*"2",18*/
{0x10,0x80,0x20,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"3",19*/
{0x02,0x00,0x0D,0x00,0x11,0x00,0x3F,0xC0,0x01,0x40,0x00,0x00},/*"4",20*/
{0x3C,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x23,0x80,0x00,0x00},/*"5",21*/
{0x1F,0x80,0x24,0x40,0x24,0x40,0x34,0x40,0x03,0x80,0x00,0x00},/*"6",22*/
{0x30,0x00,0x20,0x00,0x27,0xC0,0x38,0x00,0x20,0x00,0x00,0x00},/*"7",23*/
{0x1B,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"8",24*/
{0x1C,0x00,0x22,0xC0,0x22,0x40,0x22,0x40,0x1F,0x80,0x00,0x00},/*"9",25*/
{0x00,0x00,0x00,0x00,0x08,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*":",26*/
{0x00,0x00,0x00,0x00,0x04,0x60,0x00,0x00,0x00,0x00,0x00,0x00},/*";",27*/
{0x00,0x00,0x04,0x00,0x0A,0x00,0x11,0x00,0x20,0x80,0x40,0x40},/*"<",28*/
{0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x00,0x00},/*"=",29*/
{0x00,0x00,0x40,0x40,0x20,0x80,0x11,0x00,0x0A,0x00,0x04,0x00},/*">",30*/
{0x18,0x00,0x20,0x00,0x23,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"?",31*/
{0x1F,0x80,0x20,0x40,0x27,0x40,0x29,0x40,0x1F,0x40,0x00,0x00},/*"@",32*/
{0x00,0x40,0x07,0xC0,0x39,0x00,0x0F,0x00,0x01,0xC0,0x00,0x40},/*"A",33*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"B",34*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x30,0x80,0x00,0x00},/*"C",35*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"D",36*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x40,0x30,0xC0,0x00,0x00},/*"E",37*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x00,0x30,0x00,0x00,0x00},/*"F",38*/
{0x0F,0x00,0x10,0x80,0x20,0x40,0x22,0x40,0x33,0x80,0x02,0x00},/*"G",39*/
{0x20,0x40,0x3F,0xC0,0x04,0x00,0x04,0x00,0x3F,0xC0,0x20,0x40},/*"H",40*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x00,0x00},/*"I",41*/
{0x00,0x60,0x20,0x20,0x20,0x20,0x3F,0xC0,0x20,0x00,0x20,0x00},/*"J",42*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x0B,0x00,0x30,0xC0,0x20,0x40},/*"K",43*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x00,0x40,0x00,0x40,0x00,0xC0},/*"L",44*/
{0x3F,0xC0,0x3C,0x00,0x03,0xC0,0x3C,0x00,0x3F,0xC0,0x00,0x00},/*"M",45*/
{0x20,0x40,0x3F,0xC0,0x0C,0x40,0x23,0x00,0x3F,0xC0,0x20,0x00},/*"N",46*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"O",47*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"P",48*/
{0x1F,0x80,0x21,0x40,0x21,0x40,0x20,0xE0,0x1F,0xA0,0x00,0x00},/*"Q",49*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x26,0x00,0x19,0xC0,0x00,0x40},/*"R",50*/
{0x18,0xC0,0x24,0x40,0x24,0x40,0x22,0x40,0x31,0x80,0x00,0x00},/*"S",51*/
{0x30,0x00,0x20,0x40,0x3F,0xC0,0x20,0x40,0x30,0x00,0x00,0x00},/*"T",52*/
{0x20,0x00,0x3F,0x80,0x00,0x40,0x00,0x40,0x3F,0x80,0x20,0x00},/*"U",53*/
{0x20,0x00,0x3E,0x00,0x01,0xC0,0x07,0x00,0x38,0x00,0x20,0x00},/*"V",54*/
{0x38,0x00,0x07,0xC0,0x3C,0x00,0x07,0xC0,0x38,0x00,0x00,0x00},/*"W",55*/
{0x20,0x40,0x39,0xC0,0x06,0x00,0x39,0xC0,0x20,0x40,0x00,0x00},/*"X",56*/
{0x20,0x00,0x38,0x40,0x07,0xC0,0x38,0x40,0x20,0x00,0x00,0x00},/*"Y",57*/
{0x30,0x40,0x21,0xC0,0x26,0x40,0x38,0x40,0x20,0xC0,0x00,0x00},/*"Z",58*/
{0x00,0x00,0x00,0x00,0x7F,0xE0,0x40,0x20,0x40,0x20,0x00,0x00},/*"[",59*/
{0x00,0x00,0x70,0x00,0x0C,0x00,0x03,0x80,0x00,0x40,0x00,0x00},/*"",60*/
{0x00,0x00,0x40,0x20,0x40,0x20,0x7F,0xE0,0x00,0x00,0x00,0x00},/*"]",61*/
{0x00,0x00,0x20,0x00,0x40,0x00,0x20,0x00,0x00,0x00,0x00,0x00},/*"^",62*/
{0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10},/*"_",63*/
{0x00,0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"`",64*/
{0x00,0x00,0x02,0x80,0x05,0x40,0x05,0x40,0x03,0xC0,0x00,0x40},/*"a",65*/
{0x20,0x00,0x3F,0xC0,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"b",66*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x06,0x40,0x00,0x00},/*"c",67*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x24,0x40,0x3F,0xC0,0x00,0x40},/*"d",68*/
{0x00,0x00,0x03,0x80,0x05,0x40,0x05,0x40,0x03,0x40,0x00,0x00},/*"e",69*/
{0x00,0x00,0x04,0x40,0x1F,0xC0,0x24,0x40,0x24,0x40,0x20,0x00},/*"f",70*/
{0x00,0x00,0x02,0xE0,0x05,0x50,0x05,0x50,0x06,0x50,0x04,0x20},/*"g",71*/
{0x20,0x40,0x3F,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"h",72*/
{0x00,0x00,0x04,0x40,0x27,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"i",73*/
{0x00,0x10,0x00,0x10,0x04,0x10,0x27,0xE0,0x00,0x00,0x00,0x00},/*"j",74*/
{0x20,0x40,0x3F,0xC0,0x01,0x40,0x07,0x00,0x04,0xC0,0x04,0x40},/*"k",75*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x00,0x40,0x00,0x40,0x00,0x00},/*"l",76*/
{0x07,0xC0,0x04,0x00,0x07,0xC0,0x04,0x00,0x03,0xC0,0x00,0x00},/*"m",77*/
{0x04,0x40,0x07,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"n",78*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"o",79*/
{0x04,0x10,0x07,0xF0,0x04,0x50,0x04,0x40,0x03,0x80,0x00,0x00},/*"p",80*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x50,0x07,0xF0,0x00,0x10},/*"q",81*/
{0x04,0x40,0x07,0xC0,0x02,0x40,0x04,0x00,0x04,0x00,0x00,0x00},/*"r",82*/
{0x00,0x00,0x06,0x40,0x05,0x40,0x05,0x40,0x04,0xC0,0x00,0x00},/*"s",83*/
{0x00,0x00,0x04,0x00,0x1F,0x80,0x04,0x40,0x00,0x40,0x00,0x00},/*"t",84*/
{0x04,0x00,0x07,0x80,0x00,0x40,0x04,0x40,0x07,0xC0,0x00,0x40},/*"u",85*/
{0x04,0x00,0x07,0x00,0x04,0xC0,0x01,0x80,0x06,0x00,0x04,0x00},/*"v",86*/
{0x06,0x00,0x01,0xC0,0x07,0x00,0x01,0xC0,0x06,0x00,0x00,0x00},/*"w",87*/
{0x04,0x40,0x06,0xC0,0x01,0x00,0x06,0xC0,0x04,0x40,0x00,0x00},/*"x",88*/
{0x04,0x10,0x07,0x10,0x04,0xE0,0x01,0x80,0x06,0x00,0x04,0x00},/*"y",89*/
{0x00,0x00,0x04,0x40,0x05,0xC0,0x06,0x40,0x04,0x40,0x00,0x00},/*"z",90*/
{0x00,0x00,0x00,0x00,0x04,0x00,0x7B,0xE0,0x40,0x20,0x00,0x00},/*"{",91*/
{0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xF0,0x00,0x00,0x00,0x00},/*"|",92*/
{0x00,0x00,0x40,0x20,0x7B,0xE0,0x04,0x00,0x00,0x00,0x00,0x00},/*"}",93*/
{0x40,0x00,0x80,0x00,0x40,0x00,0x20,0x00,0x20,0x00,0x40,0x00},/*"~",94*/
};
const unsigned char oled_asc2_1608[95][16]={
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",0*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0xCC,0x00,0x0C,0x00,0x00,0x00,0x00,0x00,0x00},/*"!",1*/
{0x00,0x00,0x08,0x00,0x30,0x00,0x60,0x00,0x08,0x00,0x30,0x00,0x60,0x00,0x00,0x00},/*""",2*/
{0x02,0x20,0x03,0xFC,0x1E,0x20,0x02,0x20,0x03,0xFC,0x1E,0x20,0x02,0x20,0x00,0x00},/*"#",3*/
{0x00,0x00,0x0E,0x18,0x11,0x04,0x3F,0xFF,0x10,0x84,0x0C,0x78,0x00,0x00,0x00,0x00},/*"$",4*/
{0x0F,0x00,0x10,0x84,0x0F,0x38,0x00,0xC0,0x07,0x78,0x18,0x84,0x00,0x78,0x00,0x00},/*"%",5*/
{0x00,0x78,0x0F,0x84,0x10,0xC4,0x11,0x24,0x0E,0x98,0x00,0xE4,0x00,0x84,0x00,0x08},/*"&",6*/
{0x08,0x00,0x68,0x00,0x70,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"'",7*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x07,0xE0,0x18,0x18,0x20,0x04,0x40,0x02,0x00,0x00},/*"(",8*/
{0x00,0x00,0x40,0x02,0x20,0x04,0x18,0x18,0x07,0xE0,0x00,0x00,0x00,0x00,0x00,0x00},/*")",9*/
{0x02,0x40,0x02,0x40,0x01,0x80,0x0F,0xF0,0x01,0x80,0x02,0x40,0x02,0x40,0x00,0x00},/*"*",10*/
{0x00,0x80,0x00,0x80,0x00,0x80,0x0F,0xF8,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x00},/*"+",11*/
{0x00,0x01,0x00,0x0D,0x00,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*",",12*/
{0x00,0x00,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80},/*"-",13*/
{0x00,0x00,0x00,0x0C,0x00,0x0C,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*".",14*/
{0x00,0x00,0x00,0x06,0x00,0x18,0x00,0x60,0x01,0x80,0x06,0x00,0x18,0x00,0x20,0x00},/*"/",15*/
{0x00,0x00,0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"0",16*/
{0x00,0x00,0x08,0x04,0x08,0x04,0x1F,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"1",17*/
{0x00,0x00,0x0E,0x0C,0x10,0x14,0x10,0x24,0x10,0x44,0x11,0x84,0x0E,0x0C,0x00,0x00},/*"2",18*/
{0x00,0x00,0x0C,0x18,0x10,0x04,0x11,0x04,0x11,0x04,0x12,0x88,0x0C,0x70,0x00,0x00},/*"3",19*/
{0x00,0x00,0x00,0xE0,0x03,0x20,0x04,0x24,0x08,0x24,0x1F,0xFC,0x00,0x24,0x00,0x00},/*"4",20*/
{0x00,0x00,0x1F,0x98,0x10,0x84,0x11,0x04,0x11,0x04,0x10,0x88,0x10,0x70,0x00,0x00},/*"5",21*/
{0x00,0x00,0x07,0xF0,0x08,0x88,0x11,0x04,0x11,0x04,0x18,0x88,0x00,0x70,0x00,0x00},/*"6",22*/
{0x00,0x00,0x1C,0x00,0x10,0x00,0x10,0xFC,0x13,0x00,0x1C,0x00,0x10,0x00,0x00,0x00},/*"7",23*/
{0x00,0x00,0x0E,0x38,0x11,0x44,0x10,0x84,0x10,0x84,0x11,0x44,0x0E,0x38,0x00,0x00},/*"8",24*/
{0x00,0x00,0x07,0x00,0x08,0x8C,0x10,0x44,0x10,0x44,0x08,0x88,0x07,0xF0,0x00,0x00},/*"9",25*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x03,0x0C,0x03,0x0C,0x00,0x00,0x00,0x00,0x00,0x00},/*":",26*/
{0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*";",27*/
{0x00,0x00,0x00,0x80,0x01,0x40,0x02,0x20,0x04,0x10,0x08,0x08,0x10,0x04,0x00,0x00},/*"<",28*/
{0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x00,0x00},/*"=",29*/
{0x00,0x00,0x10,0x04,0x08,0x08,0x04,0x10,0x02,0x20,0x01,0x40,0x00,0x80,0x00,0x00},/*">",30*/
{0x00,0x00,0x0E,0x00,0x12,0x00,0x10,0x0C,0x10,0x6C,0x10,0x80,0x0F,0x00,0x00,0x00},/*"?",31*/
{0x03,0xE0,0x0C,0x18,0x13,0xE4,0x14,0x24,0x17,0xC4,0x08,0x28,0x07,0xD0,0x00,0x00},/*"@",32*/
{0x00,0x04,0x00,0x3C,0x03,0xC4,0x1C,0x40,0x07,0x40,0x00,0xE4,0x00,0x1C,0x00,0x04},/*"A",33*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x04,0x11,0x04,0x0E,0x88,0x00,0x70,0x00,0x00},/*"B",34*/
{0x03,0xE0,0x0C,0x18,0x10,0x04,0x10,0x04,0x10,0x04,0x10,0x08,0x1C,0x10,0x00,0x00},/*"C",35*/
{0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"D",36*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x04,0x17,0xC4,0x10,0x04,0x08,0x18,0x00,0x00},/*"E",37*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x00,0x17,0xC0,0x10,0x00,0x08,0x00,0x00,0x00},/*"F",38*/
{0x03,0xE0,0x0C,0x18,0x10,0x04,0x10,0x04,0x10,0x44,0x1C,0x78,0x00,0x40,0x00,0x00},/*"G",39*/
{0x10,0x04,0x1F,0xFC,0x10,0x84,0x00,0x80,0x00,0x80,0x10,0x84,0x1F,0xFC,0x10,0x04},/*"H",40*/
{0x00,0x00,0x10,0x04,0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x04,0x00,0x00,0x00,0x00},/*"I",41*/
{0x00,0x03,0x00,0x01,0x10,0x01,0x10,0x01,0x1F,0xFE,0x10,0x00,0x10,0x00,0x00,0x00},/*"J",42*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x03,0x80,0x14,0x64,0x18,0x1C,0x10,0x04,0x00,0x00},/*"K",43*/
{0x10,0x04,0x1F,0xFC,0x10,0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x0C,0x00,0x00},/*"L",44*/
{0x10,0x04,0x1F,0xFC,0x1F,0x00,0x00,0xFC,0x1F,0x00,0x1F,0xFC,0x10,0x04,0x00,0x00},/*"M",45*/
{0x10,0x04,0x1F,0xFC,0x0C,0x04,0x03,0x00,0x00,0xE0,0x10,0x18,0x1F,0xFC,0x10,0x00},/*"N",46*/
{0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"O",47*/
{0x10,0x04,0x1F,0xFC,0x10,0x84,0x10,0x80,0x10,0x80,0x10,0x80,0x0F,0x00,0x00,0x00},/*"P",48*/
{0x07,0xF0,0x08,0x18,0x10,0x24,0x10,0x24,0x10,0x1C,0x08,0x0A,0x07,0xF2,0x00,0x00},/*"Q",49*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x00,0x11,0xC0,0x11,0x30,0x0E,0x0C,0x00,0x04},/*"R",50*/
{0x00,0x00,0x0E,0x1C,0x11,0x04,0x10,0x84,0x10,0x84,0x10,0x44,0x1C,0x38,0x00,0x00},/*"S",51*/
{0x18,0x00,0x10,0x00,0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x00,0x18,0x00,0x00,0x00},/*"T",52*/
{0x10,0x00,0x1F,0xF8,0x10,0x04,0x00,0x04,0x00,0x04,0x10,0x04,0x1F,0xF8,0x10,0x00},/*"U",53*/
{0x10,0x00,0x1E,0x00,0x11,0xE0,0x00,0x1C,0x00,0x70,0x13,0x80,0x1C,0x00,0x10,0x00},/*"V",54*/
{0x1F,0xC0,0x10,0x3C,0x00,0xE0,0x1F,0x00,0x00,0xE0,0x10,0x3C,0x1F,0xC0,0x00,0x00},/*"W",55*/
{0x10,0x04,0x18,0x0C,0x16,0x34,0x01,0xC0,0x01,0xC0,0x16,0x34,0x18,0x0C,0x10,0x04},/*"X",56*/
{0x10,0x00,0x1C,0x00,0x13,0x04,0x00,0xFC,0x13,0x04,0x1C,0x00,0x10,0x00,0x00,0x00},/*"Y",57*/
{0x08,0x04,0x10,0x1C,0x10,0x64,0x10,0x84,0x13,0x04,0x1C,0x04,0x10,0x18,0x00,0x00},/*"Z",58*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x7F,0xFE,0x40,0x02,0x40,0x02,0x40,0x02,0x00,0x00},/*"[",59*/
{0x00,0x00,0x30,0x00,0x0C,0x00,0x03,0x80,0x00,0x60,0x00,0x1C,0x00,0x03,0x00,0x00},/*"",60*/
{0x00,0x00,0x40,0x02,0x40,0x02,0x40,0x02,0x7F,0xFE,0x00,0x00,0x00,0x00,0x00,0x00},/*"]",61*/
{0x00,0x00,0x00,0x00,0x20,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x00,0x00},/*"^",62*/
{0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01},/*"_",63*/
{0x00,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"`",64*/
{0x00,0x00,0x00,0x98,0x01,0x24,0x01,0x44,0x01,0x44,0x01,0x44,0x00,0xFC,0x00,0x04},/*"a",65*/
{0x10,0x00,0x1F,0xFC,0x00,0x88,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x70,0x00,0x00},/*"b",66*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x00},/*"c",67*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x11,0x08,0x1F,0xFC,0x00,0x04},/*"d",68*/
{0x00,0x00,0x00,0xF8,0x01,0x44,0x01,0x44,0x01,0x44,0x01,0x44,0x00,0xC8,0x00,0x00},/*"e",69*/
{0x00,0x00,0x01,0x04,0x01,0x04,0x0F,0xFC,0x11,0x04,0x11,0x04,0x11,0x00,0x18,0x00},/*"f",70*/
{0x00,0x00,0x00,0xD6,0x01,0x29,0x01,0x29,0x01,0x29,0x01,0xC9,0x01,0x06,0x00,0x00},/*"g",71*/
{0x10,0x04,0x1F,0xFC,0x00,0x84,0x01,0x00,0x01,0x00,0x01,0x04,0x00,0xFC,0x00,0x04},/*"h",72*/
{0x00,0x00,0x01,0x04,0x19,0x04,0x19,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"i",73*/
{0x00,0x00,0x00,0x03,0x00,0x01,0x01,0x01,0x19,0x01,0x19,0xFE,0x00,0x00,0x00,0x00},/*"j",74*/
{0x10,0x04,0x1F,0xFC,0x00,0x24,0x00,0x40,0x01,0xB4,0x01,0x0C,0x01,0x04,0x00,0x00},/*"k",75*/
{0x00,0x00,0x10,0x04,0x10,0x04,0x1F,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"l",76*/
{0x01,0x04,0x01,0xFC,0x01,0x04,0x01,0x00,0x01,0xFC,0x01,0x04,0x01,0x00,0x00,0xFC},/*"m",77*/
{0x01,0x04,0x01,0xFC,0x00,0x84,0x01,0x00,0x01,0x00,0x01,0x04,0x00,0xFC,0x00,0x04},/*"n",78*/
{0x00,0x00,0x00,0xF8,0x01,0x04,0x01,0x04,0x01,0x04,0x01,0x04,0x00,0xF8,0x00,0x00},/*"o",79*/
{0x01,0x01,0x01,0xFF,0x00,0x85,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x70,0x00,0x00},/*"p",80*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x01,0x05,0x01,0xFF,0x00,0x01},/*"q",81*/
{0x01,0x04,0x01,0x04,0x01,0xFC,0x00,0x84,0x01,0x04,0x01,0x00,0x01,0x80,0x00,0x00},/*"r",82*/
{0x00,0x00,0x00,0xCC,0x01,0x24,0x01,0x24,0x01,0x24,0x01,0x24,0x01,0x98,0x00,0x00},/*"s",83*/
{0x00,0x00,0x01,0x00,0x01,0x00,0x07,0xF8,0x01,0x04,0x01,0x04,0x00,0x00,0x00,0x00},/*"t",84*/
{0x01,0x00,0x01,0xF8,0x00,0x04,0x00,0x04,0x00,0x04,0x01,0x08,0x01,0xFC,0x00,0x04},/*"u",85*/
{0x01,0x00,0x01,0x80,0x01,0x70,0x00,0x0C,0x00,0x10,0x01,0x60,0x01,0x80,0x01,0x00},/*"v",86*/
{0x01,0xF0,0x01,0x0C,0x00,0x30,0x01,0xC0,0x00,0x30,0x01,0x0C,0x01,0xF0,0x01,0x00},/*"w",87*/
{0x00,0x00,0x01,0x04,0x01,0x8C,0x00,0x74,0x01,0x70,0x01,0x8C,0x01,0x04,0x00,0x00},/*"x",88*/
{0x01,0x01,0x01,0x81,0x01,0x71,0x00,0x0E,0x00,0x18,0x01,0x60,0x01,0x80,0x01,0x00},/*"y",89*/
{0x00,0x00,0x01,0x84,0x01,0x0C,0x01,0x34,0x01,0x44,0x01,0x84,0x01,0x0C,0x00,0x00},/*"z",90*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x00,0x3E,0xFC,0x40,0x02,0x40,0x02},/*"{",91*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00},/*"|",92*/
{0x00,0x00,0x40,0x02,0x40,0x02,0x3E,0xFC,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"}",93*/
{0x00,0x00,0x60,0x00,0x80,0x00,0x80,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x20,0x00},/*"~",94*/
};
void Motor_Init(void); //电机接口初始化
void forward(void); //小车前进控制函数
void back(void); //小车后退控制函数
void left_turn(void); //向左转
void right_turn(void); //向右转
void stop(void); //停车
void circle_left(void); //原地向左转圈
void circle_right(void); //原地向右转圈
void left_moto(void); //左电机调速函数
void right_moto(void); //右电机调速函数
void Timer1_Init(u16 arr,u16 psc); //定时器1初始化函数
void Timer2_Init(u16 arr,u16 psc); //定时器2初始化函数
void Timer3_Init(u16 arr,u16 psc); //定时器3初始化函数
void Beep_Init(void); //蜂鸣器接口初始化
void Key_Init(void); //按键接口初始化函数
void Key_Scan(void); //按键1扫描函数
void Bz_Init(void); //红外避障信号接口初始化函数
void OLED_WR_Byte(u8 dat,u8 cmd);
void OLED_Display_On(void);
void OLED_Display_Off(void);
void OLED_Refresh_Gram(void);
void Oled_Init(void);
void OLED_Clear(void);
void OLED_DrawPoint(u8 x,u8 y,u8 t);
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode);
void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size);
void OLED_ShowString(u8 x,u8 y,const u8 *p);
void Oled_Show(void);
void Dj_Init(void);
void ControlLeftOrRight(void);
void Hw_bz(void);
void process(void);
/****************************************************************
程序功能
将超声波模块、舵机安装好并连接好杜邦线。智能小车上电后,按下开发
板启动按键(靠近电源开关那个)小车开始避障碍运动。同时测到的距离
值会在OLED中显示出来。
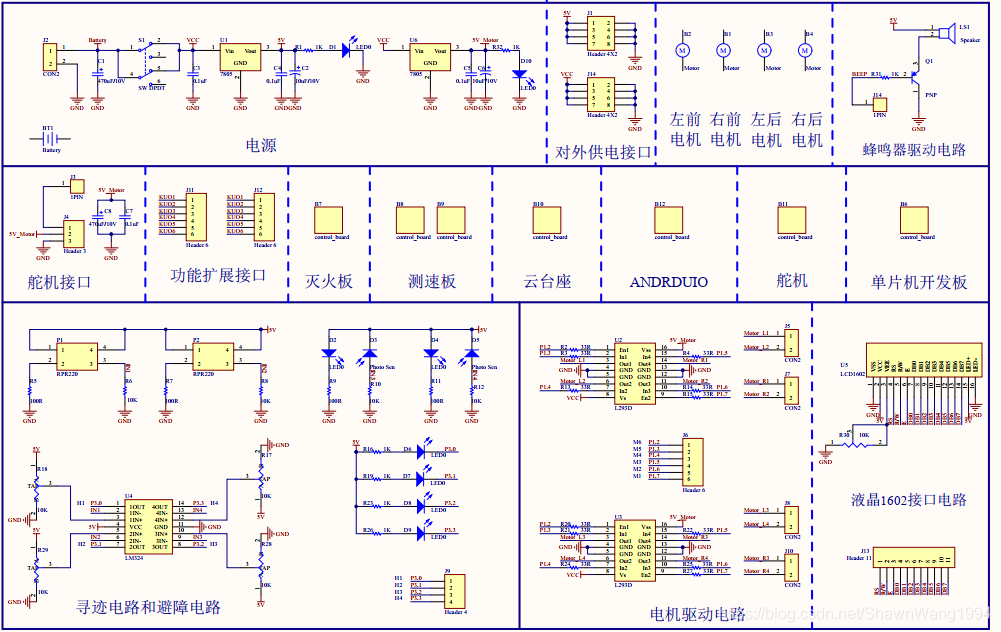
接线说明:
电机驱动线:
开发板的PA2接小车底盘的M6
开发板的PA3接小车底盘的M5
开发板的PA4接小车底盘的M4
开发板的PA5接小车底盘的M3
开发板的PA6接小车底盘的M2
开发板的PA7接小车底盘的M1
超声波模块接线:
超声波模块的VCC接开发板的5V
超声波模块的GND接开发板的GND
超声波模块的Trig接开发板的PB1
超声波模块的Echo接开发板的PB0
舵机接线:
将舵机线接到小车底盘的舵机接口上(注意方向,舵机棕线是GND,红线是VCC,
橙线是信号线。它们分别对应小车底盘舵机接口上的GND,5V和S)。另外,舵机
的信号线需要一条单独的杜邦线连接到开发板的PA0。
电源线:
开发板的5V接小车底盘的5V
开发板的GND接小车底盘的GND
红外避障信号线:
开发板的PA13接小车底盘的H3
开发板的PA14接小车底盘的H4
(本实验采用红外避障作为超声波避障的辅助,所以红外避障信号线也要
连接)
****************************************************************/
int main(void)
{
u8 k;
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72); //延时初始化
JTAG_Set(JTAG_SWD_DISABLE); //关闭JTAG接口
JTAG_Set(SWD_ENABLE); //打开SWD接口
Oled_Init(); //OLED初始化
Timer3_Init(0XFFFF,72-1); //超声波初始化
Timer1_Init(499,7199);
Motor_Init(); //初始化与电机连接的硬件接口
Timer2_Init(25,719); //10Khz的计数频率,计数到9为1ms
Beep_Init(); //蜂鸣器接口初始化
Key_Init(); //按键接口初始化
Bz_Init(); //红外避障信号接口初始化
Dj_Init(); //舵机控制接口初始化
ControlLeftOrRight(); //舵机初始化
Key_Scan(); //按键扫描
while(1)
{
if(timer>=400)
{
timer = 0;
Oled_Show(); //oled显示提示信息
S_temp = JuLi; //超声波模块测到的距离值
Hw_bz(); //红外避障
if((S_temp>=250)&&(hw_flag == 0)) //如果不满足避障条件(超声波模块测到前方障碍物距离大于25厘米或红外避障感应到前方有障碍物)
{
BEEP = 1;
forward(); //智能小车继续前进
}
else //如果满足避障条件
{
BEEP = 0; //蜂鸣器响
stop(); //智能小车停下
for(k=0;k<=8;k++)
{
delay_ms(1000);
}
BEEP = 1; //蜂鸣器不响
process(); //避障处理
}
}
Oled_Show(); //OLED显示信息
}
}
void Dj_Init(void) //舵机控制接口初始化函数
{
RCC->APB2ENR|=1<<2; //使能PORTA口时钟
GPIOA->CRL&=0XFFFFFFF0; //PORTA.0 推挽输出
GPIOA->CRL|=0X00000003;
GPIOA->ODR|=1<<0; //输出1
}
void ControlLeftOrRight(void) //舵机自检函数
{
u8 i;
LeftOrRight = Stop; //舵机停在中间
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
LeftOrRight = Left; //舵机左边
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
LeftOrRight = Right; //舵机右边
TimeOutCounter = 0;
for(i=0;i<=13;i++)
{
delay_ms(1000);
}
LeftOrRight = Stop; //舵机停在中间
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
}
void Hw_bz(void) //红外避障函数
{
if((BZ_LEFT == 0)||(BZ_RIGHT == 0)) //如果左右两边任何一个红外避障模块感应到障碍物
{
hw_flag = 1; //设置红外避障标志
}
else
{
hw_flag = 0; //屏蔽红外避障标志
}
}
void Beep_Init(void) //蜂鸣器接口初始化
{
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFF0FFFFF;
GPIOB->CRL|=0X00300000; //PB5推挽输出
GPIOB->ODR|=1<<5; //PB5输出高
}
void Bz_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRH&=0XFF0FFFFF;
GPIOA->CRH|=0X00800000; //PA13上拉输入
GPIOA->ODR|=1<<13; //PA13上拉
GPIOA->CRH&=0XF0FFFFFF;
GPIOA->CRH|=0X08000000; //PA14上拉输入
GPIOA->ODR|=1<<14; //PA14上拉
}
void Key_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000008; //PA8上拉输入
GPIOA->ODR|=1<<8; //PA8上拉
}
void Key_Scan(void) //按键扫描函数
{
LOOP:if(KEY1==0) //第一次判断是否有按键按下
{
delay_ms(5);
if(KEY1==0) //第二次判断是否有按键按下
{
BEEP = 0; //蜂鸣器响
while(KEY1 == 0); //等待按键松开
BEEP = 1; //蜂鸣器不响
}
else
{
goto LOOP; //第一次判断时如果按键没有按下重新扫描
}
}
else
{
goto LOOP; //第二次判断时如果按键没有按下重新扫描
}
}
void Motor_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA接口时钟
GPIOA->CRL&=0XFFFFF0FF;
GPIOA->CRL|=0X00000300; //PA2推挽输出
GPIOA->ODR|=1<<2; //PA2输出高电平
GPIOA->CRL&=0XFFFF0FFF;
GPIOA->CRL|=0X00003000; //PA3推挽输出
GPIOA->ODR|=1<<3; //PA3输出高电平
GPIOA->CRL&=0XFFF0FFFF;
GPIOA->CRL|=0X00030000; //PA4推挽输出
GPIOA->ODR|=1<<4; //PA4输出高电平
GPIOA->CRL&=0XFF0FFFFF;
GPIOA->CRL|=0X00300000; //PA5推挽输出
GPIOA->ODR|=1<<5; //PA5输出高电平
GPIOA->CRL&=0XF0FFFFFF;
GPIOA->CRL|=0X03000000; //PA6推挽输出
GPIOA->ODR|=1<<6; //PA6输出高电平
GPIOA->CRL&=0X0FFFFFFF;
GPIOA->CRL|=0X30000000; //PA7推挽输出
GPIOA->ODR|=1<<7; //PA7输出高电平
}
void forward(void) //小车前进控制函数
{
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void back(void) //小车后退控制函数
{
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
}
void left_turn(void) //向左转
{
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
void right_turn(void) //向右转
{
IN1 = 0;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void stop(void) //停车
{
IN1 = 0;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
void circle_left(void) //原地向左转圈
{
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 1;
}
void circle_right(void) //原地向右转圈
{
IN1 = 0;
IN2 = 1;
IN3 = 1;
IN4 = 0;
}
void left_moto(void) //左电机调速函数
{
if(left_pwm)
{
if(pwmval_left <= pwmval_left_init)
{
EN1 = 1;
}
else
{
EN1 = 0;
}
if(pwmval_left >= 20)
{
pwmval_left = 0;
}
}
else
{
EN1 = 0;
}
}
void right_moto(void) //右电机调速函数
{
if(right_pwm)
{
if(pwmval_right <= pwmval_right_init)
{
EN2 = 1;
}
else if(pwmval_right > pwmval_right_init)
{
EN2 = 0;
}
if(pwmval_right >= 20)
{
pwmval_right = 0;
}
}
else
{
EN2 = 0;
}
}
void OLED_Refresh_Gram(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //设置页地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //设置显示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //设置显示位置—列高地址
for(n=0;n<128;n++)
{
OLED_WR_Byte(OLED_GRAM[n]
,OLED_DATA);
}
}
}
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 i;
if(cmd)
{
OLED_RS_Set();
}
else
{
OLED_RS_Clr();
}
for(i=0;i<8;i++)
{
OLED_SCLK_Clr();
if(dat&0x80)
{
OLED_SDIN_Set();
}
else
{
OLED_SDIN_Clr();
}
OLED_SCLK_Set();
dat<<=1;
}
OLED_RS_Set();
}
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)for(n=0;n<128;n++)OLED_GRAM[n]=0X00;
OLED_Refresh_Gram(); //更新显示
}
void OLED_DrawPoint(u8 x,u8 y,u8 t)
{
u8 pos,bx,temp=0;
if(x>127||y>63)return; //超出范围了.
pos=7-y/8;
bx=y%8;
temp=1<<(7-bx);
if(t)OLED_GRAM[x][pos]|=temp;
else OLED_GRAM[x][pos]&=~temp;
}
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode)
{
u8 temp,t,t1;
u8 y0=y;
chr=chr-' '; //得到偏移后的值
for(t=0;t
{
if(size==12) //调用1206字体
{
temp=oled_asc2_1206[chr][t];
}
else //调用1608字体
{
temp=oled_asc2_1608[chr][t];
}
for(t1=0;t1<8;t1++)
{
if(temp&0x80)
{
OLED_DrawPoint(x,y,mode);
}
else
{
OLED_DrawPoint(x,y,!mode);
}
temp<<=1;
y++;
if((y-y0)==size)
{
y=y0;
x++;
break;
}
}
}
}
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size/2)*t,y,' ',size,1);
continue;
}
else
{
enshow=1;
}
}
OLED_ShowChar(x+(size/2)*t,y,temp+'0',size,1);
}
}
void OLED_ShowString(u8 x,u8 y,const u8 *p)
{
#define MAX_CHAR_POSX 122
#define MAX_CHAR_POSY 58
while(*p!='�')
{
if(x>MAX_CHAR_POSX){x=0;y+=16;}
if(y>MAX_CHAR_POSY){y=x=0;OLED_Clear();}
OLED_ShowChar(x,y,*p,12,1);
x+=8;
p++;
}
}
void Oled_Init(void)
{
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFFF0FFFF;
GPIOB->CRL|=0X00020000; //PB4 推挽输出
RCC->APB2ENR|=1<<4; //使能PORTC时钟
RCC->APB2ENR|=1<<0; //使能AFIO时钟
GPIOC->CRH&=0X000FFFFF; //PC13,14,15设置成输出 2MHz 推挽输出
GPIOC->CRH|=0X22200000;
PWR->CR|=1<<8; //取消备份区写保护
RCC->BDCR&=0xFFFFFFFE; //外部低俗振荡器关闭 PC14,PC15成为普通IO
BKP->CR&=0xFFFFFFFE; //侵入检测TAMPER引脚作为通用IO口使用
PWR->CR&=0xFFFFFEFF; //备份区写保护
OLED_RST_Clr();
delay_ms(100);
OLED_RST_Set();
OLED_WR_Byte(0xAE,OLED_CMD); //关闭显示
OLED_WR_Byte(0xD5,OLED_CMD); //设置时钟分频因子,震荡频率
OLED_WR_Byte(80,OLED_CMD); //[3:0],分频因子;[7:4],震荡频率
OLED_WR_Byte(0xA8,OLED_CMD); //设置驱动路数
OLED_WR_Byte(0X3F,OLED_CMD); //默认0X3F(1/64)
OLED_WR_Byte(0xD3,OLED_CMD); //设置显示偏移
OLED_WR_Byte(0X00,OLED_CMD); //默认为0
OLED_WR_Byte(0x40,OLED_CMD); //设置显示开始行 [5:0],行数.
OLED_WR_Byte(0x8D,OLED_CMD); //电荷泵设置
OLED_WR_Byte(0x14,OLED_CMD); //bit2,开启/关闭
OLED_WR_Byte(0x20,OLED_CMD); //设置内存地址模式
OLED_WR_Byte(0x02,OLED_CMD); //[1:0],00,列地址模式;01,行地址模式;10,页地址模式;默认10;
OLED_WR_Byte(0xA1,OLED_CMD); //段重定义设置,bit0:0,0->0;1,0->127;
OLED_WR_Byte(0xC0,OLED_CMD); //设置COM扫描方向;bit3:0,普通模式;1,重定义模式 COM[N-1]->COM0;N:驱动路数
OLED_WR_Byte(0xDA,OLED_CMD); //设置COM硬件引脚配置
OLED_WR_Byte(0x12,OLED_CMD); //[5:4]配置
OLED_WR_Byte(0x81,OLED_CMD); //对比度设置
OLED_WR_Byte(0xEF,OLED_CMD); //1~255;默认0X7F (亮度设置,越大越亮)
OLED_WR_Byte(0xD9,OLED_CMD); //设置预充电周期
OLED_WR_Byte(0xf1,OLED_CMD); //[3:0],PHASE 1;[7:4],PHASE 2;
OLED_WR_Byte(0xDB,OLED_CMD); //设置VCOMH 电压倍率
OLED_WR_Byte(0x30,OLED_CMD); //[6:4] 000,0.65*vcc;001,0.77*vcc;011,0.83*vcc;
OLED_WR_Byte(0xA4,OLED_CMD); //全局显示开启;bit0:1,开启;0,关闭;(白屏/黑屏)
OLED_WR_Byte(0xA6,OLED_CMD); //设置显示方式;bit0:1,反相显示;0,正常显示
OLED_WR_Byte(0xAF,OLED_CMD); //开启显示
OLED_Clear();
}
void Oled_Show(void)
{
OLED_ShowString(20,10,"ChaoSB-TEST");
OLED_ShowString(0,30,"Distance:");
OLED_ShowNumber(80,30,(u16)JuLi,4,12);
OLED_ShowString(110,30,"mm");
OLED_Refresh_Gram(); //刷新
}
void process(void) //避障处理函数
{
u8 j;
u8 p;
u32 S1_temp = 0;
u32 S2_temp = 0;
LeftOrRight = Left; //舵机转到左边
TimeOutCounter = 0;
for(j=0;j<=9;j++)
{
delay_ms(1000);
}
Oled_Show(); //显示障碍物距离信息
S1_temp = JuLi; //小车左边障碍物距离存在变量S1_temp中
LeftOrRight = Right; //舵机转到右边
TimeOutCounter = 0;
for(j=0;j<=13;j++)
{
delay_ms(1000);
}
Oled_Show(); //显示障碍物距离信息
S2_temp = JuLi; //小车右边障碍物距离存在变量S2_temp中
LeftOrRight = Stop; //舵机回到中间
TimeOutCounter = 0;
for(j=0;j<=9;j++)
{
delay_ms(1000);
}
if((S1_temp<=200)||(S2_temp<=200)) //如果超声波模块测得左边或右边障碍物的距离小于20厘米
{
back(); //小车后退
for(p=0;p<=10;p++)
{
delay_ms(1000);
}
}
else
{
back(); //小车后退
for(p=0;p<=8;p++)
{
delay_ms(1000);
}
}
stop(); //小车停下
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
if(S1_temp>S2_temp) //如果左边障碍物离小车远
{
circle_left(); //小车向左转
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
}
else if(S1_temp
{
circle_right(); //小车向右转
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
}
}
void Timer3_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<1; //TIM3时钟使能
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFFFFFF00;
GPIOB->CRL|=0X00000028; //PB.0 输入 PB.1输出
TIM3->ARR=arr; //设定计数器自动重装值
TIM3->PSC=psc; //预分频器
TIM3->CCMR2|=1<<0; //选择输入端
TIM3->CCMR2|=0<<4; //配置输入滤波器 不滤波
TIM3->CCMR2|=0<<2; //配置输入分频,不分频
TIM3->CCER|=0<<9; //上升沿捕获
TIM3->CCER|=1<<8; //允许捕获计数器的值到捕获寄存器中
TIM3->DIER|=1<<3; //允许捕获中断
TIM3->DIER|=1<<0; //允许更新中断
TIM3->CR1|=0x01; //使能定时器3
MY_NVIC_Init(1,3,TIM3_IRQChannel,1);
}
/**************************************************************************
函数功能:超声波接收回波函数
入口参数:无
返回 值:无
**************************************************************************/
u16 TIM3CH3_CAPTURE_STA,TIM3CH3_CAPTURE_VAL;
void Read_Distane(void)
{
PBout(1)=1;
delay_us(15);
PBout(1)=0;
if(TIM3CH3_CAPTURE_STA&0X80) //成功捕获到了一次高电平
{
JuLi=TIM3CH3_CAPTURE_STA&0X3F;
JuLi*=65536; //溢出时间总和
JuLi+=TIM3CH3_CAPTURE_VAL; //得到总的高电平时间
JuLi=JuLi*170/1000;
TIM3CH3_CAPTURE_STA=0; //开启下一次捕获
}
}
/**************************************************************************
函数功能:超声波回波脉宽读取中断
入口参数:无
返回 值:无
**************************************************************************/
void TIM3_IRQHandler(void)
{
u16 tsr;
tsr=TIM3->SR;
if((TIM3CH3_CAPTURE_STA&0X80)==0) //还未成功捕获
{
if(tsr&0X01) //溢出
{
if(TIM3CH3_CAPTURE_STA&0X40) //已经捕获到高电平了
{
if((TIM3CH3_CAPTURE_STA&0X3F)==0X3F) //高电平太长了
{
TIM3CH3_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM3CH3_CAPTURE_VAL=0XFFFF;
}
else
{
TIM3CH3_CAPTURE_STA++;
}
}
}
if(tsr&0x08) //捕获3发生捕获事件
{
if(TIM3CH3_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM3CH3_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
TIM3CH3_CAPTURE_VAL=TIM3->CCR3; //获取当前的捕获值.
TIM3->CCER&=~(1<<9); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM3CH3_CAPTURE_STA=0; //清空
TIM3CH3_CAPTURE_VAL=0;
TIM3CH3_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM3->CNT=0; //计数器清空
TIM3->CCER|=1<<9; //CC1P=1 设置为下降沿捕获
}
}
}
TIM3->SR=0; //清除中断标志位
}
/**************************************************************************
函数功能:定时中断初始化
入口参数:arr:自动重装值 psc:时钟预分频数
返回 值:无
**************************************************************************/
void Timer1_Init(u16 arr,u16 psc)
{
RCC->APB2ENR|=1<<11; //TIM1时钟使能
TIM1->ARR=arr; //设定计数器自动重装值
TIM1->PSC=psc; //预分频器7200,得到10Khz的计数时钟
TIM1->DIER|=1<<0; //允许更新中断
TIM1->DIER|=1<<6; //允许触发中断
TIM1->CR1|=0x01; //使能定时器
MY_NVIC_Init(1,3,TIM1_UP_IRQChannel,2);
}
/**************************************************************************
函数功能:定时中断初始化
入口参数:arr:自动重装值 psc:时钟预分频数
返回 值:无
**************************************************************************/
int TIM1_UP_IRQHandler(void)
{
if(TIM1->SR&0X0001) //5ms定时中断
{
TIM1->SR&=~(1<<0); //清除定时器1中断标志位
}
Read_Distane();
return 0;
}
//定时器3中断服务程序
void TIM2_IRQHandler(void)
{
if(TIM2->SR&0X0001) //溢出中断
{
TimeOutCounter ++;
timer++;
switch(LeftOrRight)
{
case 0 : //1.5ms
{
if(TimeOutCounter<=6)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
case 1 : //1ms
{
if(TimeOutCounter<=4)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
case 2 : //2ms
{
if(TimeOutCounter<=8)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
default : break;
}
if(TimeOutCounter <= 30)
{
EN1 = 1;
EN2 = 1;
}
else if(TimeOutCounter > 30)
{
EN1 = 0;
EN2 = 0;
}
if(TimeOutCounter==80) //20ms
{
TimeOutCounter = 0;
}
}
TIM2->SR&=~(1<<0); //清除中断标志位
}
//通用定时器中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3
void Timer2_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<0; //TIM2时钟使能
TIM2->ARR=arr; //设定计数器自动重装值//刚好1ms
TIM2->PSC=psc; //预分频器7200,得到10Khz的计数时钟
//这两个东东要同时设置才可以使用中断
TIM2->DIER|=1<<0; //允许更新中断
TIM2->CR1|=0x01; //使能定时器3
MY_NVIC_Init(1,3,TIM2_IRQChannel,2); //抢占1,子优先级3,组2
}
中断函数
#include "sys.h"
//设置向量表偏移地址
//NVIC_VectTab:基址
//Offset:偏移量
//CHECK OK
//091207
void MY_NVIC_SetVectorTable(u32 NVIC_VectTab, u32 Offset)
{
//检查参数合法性
assert_param(IS_NVIC_VECTTAB(NVIC_VectTab));
assert_param(IS_NVIC_OFFSET(Offset));
SCB->VTOR = NVIC_VectTab|(Offset & (u32)0x1FFFFF80); //设置NVIC的向量表偏移寄存器
//用于标识向量表是在CODE区还是在RAM区
}
//设置NVIC分组
//NVIC_Group:NVIC分组 0~4 总共5组
//CHECK OK
//091209
void MY_NVIC_PriorityGroupConfig(u8 NVIC_Group)
{
u32 temp,temp1;
temp1=(~NVIC_Group)&0x07; //取后三位
temp1<<=8;
temp=SCB->AIRCR; //读取先前的设置
temp&=0X0000F8FF; //清空先前分组
temp|=0X05FA0000; //写入钥匙
temp|=temp1;
SCB->AIRCR=temp; //设置分组
}
//设置NVIC
//NVIC_PreemptionPriority:抢占优先级
//NVIC_SubPriority :响应优先级
//NVIC_Channel :中断编号
//NVIC_Group :中断分组 0~4
//注意优先级不能超过设定的组的范围!否则会有意想不到的错误
//组划分:
//组0:0位抢占优先级,4位响应优先级
//组1:1位抢占优先级,3位响应优先级
//组2:2位抢占优先级,2位响应优先级
//组3:3位抢占优先级,1位响应优先级
//组4:4位抢占优先级,0位响应优先级
//NVIC_SubPriority和NVIC_PreemptionPriority的原则是,数值越小,越优先
//CHECK OK
//100329
void MY_NVIC_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group)
{
u32 temp;
u8 IPRADDR=NVIC_Channel/4; //每组只能存4个,得到组地址
u8 IPROFFSET=NVIC_Channel%4; //在组内的偏移
IPROFFSET=IPROFFSET*8+4; //得到偏移的确切位置
MY_NVIC_PriorityGroupConfig(NVIC_Group); //设置分组
temp=NVIC_PreemptionPriority<<(4-NVIC_Group);
temp|=NVIC_SubPriority&(0x0f>>NVIC_Group);
temp&=0xf; //取低四位
if(NVIC_Channel<32)NVIC->ISER[0]|=1<
else NVIC->ISER[1]|=1<<(NVIC_Channel-32);
NVIC->IPR[IPRADDR]|=temp<
}
//外部中断配置函数
//只针对GPIOA~G;不包括PVD,RTC和USB唤醒这三个
//参数:GPIOx:0~6,代表GPIOA~G;BITx:需要使能的位;TRIM:触发模式,1,下升沿;2,上降沿;3,任意电平触发
//该函数一次只能配置1个IO口,多个IO口,需多次调用
//该函数会自动开启对应中断,以及屏蔽线
//待测试...
void Ex_NVIC_Config(u8 GPIOx,u8 BITx,u8 TRIM)
{
u8 EXTADDR;
u8 EXTOFFSET;
EXTADDR=BITx/4; //得到中断寄存器组的编号
EXTOFFSET=(BITx%4)*4;
RCC->APB2ENR|=0x01; //使能io复用时钟
AFIO->EXTICR[EXTADDR]&=~(0x000F<
AFIO->EXTICR[EXTADDR]|=GPIOx<
//自动设置
EXTI->IMR|=1<
if(TRIM&0x01)EXTI->FTSR|=1<
if(TRIM&0x02)EXTI->RTSR|=1<
}
//不能在这里执行所有外设复位!否则至少引起串口不工作.
//把所有时钟寄存器复位
//CHECK OK
//091209
void MYRCC_DeInit(void)
{
RCC->APB1RSTR = 0x00000000;//复位结束
RCC->APB2RSTR = 0x00000000;
RCC->AHBENR = 0x00000014; //睡眠模式闪存和SRAM时钟使能.其他关闭.
RCC->APB2ENR = 0x00000000; //外设时钟关闭.
RCC->APB1ENR = 0x00000000;
RCC->CR |= 0x00000001; //使能内部高速时钟HSION
RCC->CFGR &= 0xF8FF0000; //复位SW[1:0],HPRE[3:0],PPRE1[2:0],PPRE2[2:0],ADCPRE[1:0],MCO[2:0]
RCC->CR &= 0xFEF6FFFF; //复位HSEON,CSSON,PLLON
RCC->CR &= 0xFFFBFFFF; //复位HSEBYP
RCC->CFGR &= 0xFF80FFFF; //复位PLLSRC, PLLXTPRE, PLLMUL[3:0] and USBPRE
RCC->CIR = 0x00000000; //关闭所有中断
//配置向量表
#ifdef VECT_TAB_RAM
MY_NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
MY_NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
//CHECK OK
//091209
__asm void WFI_SET(void)
{
WFI;
}
//进入待机模式
//check ok
//091202
void Sys_Standby(void)
{
SCB->SCR|=1<<2; //使能SLEEPDEEP位 (SYS->CTRL)
RCC->APB1ENR|=1<<28; //使能电源时钟
PWR->CSR|=1<<8; //设置WKUP用于唤醒
PWR->CR|=1<<2; //清除Wake-up 标志
PWR->CR|=1<<1; //PDDS置位
WFI_SET(); //执行WFI指令
}
//系统软复位
//CHECK OK
//091209
void Sys_Soft_Reset(void)
{
SCB->AIRCR =0X05FA0000|(u32)0x04;
}
//JTAG模式设置,用于设置JTAG的模式
//mode:jtag,swd模式设置;00,全使能;01,使能SWD;10,全关闭;
//CHECK OK
//100818
void JTAG_Set(u8 mode)
{
u32 temp;
temp=mode;
temp<<=25;
RCC->APB2ENR|=1<<0; //开启辅助时钟
AFIO->MAPR&=0XF8FFFFFF; //清除MAPR的[26:24]
AFIO->MAPR|=temp; //设置jtag模式
}
//系统时钟初始化函数
//pll:选择的倍频数,从2开始,最大值为16
//CHECK OK
//091209
void Stm32_Clock_Init(u8 PLL)
{
unsigned char temp=0;
MYRCC_DeInit(); //复位并配置向量表
RCC->CR|=0x00010000; //外部高速时钟使能HSEON
while(!(RCC->CR>>17)); //等待外部时钟就绪
RCC->CFGR=0X00000400; //APB1=DIV2;APB2=DIV1;AHB=DIV1;
PLL-=2;//抵消2个单位
RCC->CFGR|=PLL<<18; //设置PLL值 2~16
RCC->CFGR|=1<<16; //PLLSRC ON
FLASH->ACR|=0x32; //FLASH 2个延时周期
RCC->CR|=0x01000000; //PLLON
while(!(RCC->CR>>25)); //等待PLL锁定
RCC->CFGR|=0x00000002; //PLL作为系统时钟
while(temp!=0x02) //等待PLL作为系统时钟设置成功
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
}
延时函数
#include
#include
#include "delay.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
//初始化延迟函数
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init(u8 SYSCLK)
{
SysTick->CTRL&=0xfffffffb; //bit2清空,选择外部时钟 HCLK/8
fac_us=SYSCLK/8;
fac_ms=(u16)fac_us*1000;
}
//延时nms
//注意nms的范围,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
接线说明:
电机驱动线:
1、 开发板 PA2 接小车底盘 M6 2、 开发板 PA3 接小车底盘 M5
3、 开发板 PA4 接小车底盘 M4 4、 开发板 PA5 接小车底盘 M3
5、 开发板 PA6 接小车底盘 M2 6、 开发板 PA7 接小车底盘 M1
超声波模块接线:
1、超声波模块 VCC 接开发板 5V 2、超声波模块 GND 接开发板 GND
3、超声波模块 Trig 接开发板 PB1 4、超声波模块 Echo 接开发板 PB0
舵机接线:
将舵机线接到小车底盘的舵机接口上(注意方向, 舵机棕线是 GND,
红线是 VCC, 橙线是信号线。 它们分别对应小车底盘舵机接口上的
GND,5V 和 S)。 另外, 舵机的信号线需要一条单独的杜邦线连接到
开发板的 PA0。
电源线:
1、 开发板 5V 接小车底盘 5V 2、 开发板 GND 接小车底盘 GND
红外避障信号线:
1、 开发板 PA13 接小车底盘 H3 2、 开发板 PA14 接小车底盘 H4
超声波避障代码
#include "sys.h"
#include "delay.h"
#define EN1 PAout(2) //L293D控制管脚定义
#define IN1 PAout(3) //L293D控制管脚定义
#define IN2 PAout(4) //L293D控制管脚定义
#define EN2 PAout(7) //L293D控制管脚定义
#define IN3 PAout(6) //L293D控制管脚定义
#define IN4 PAout(5) //L293D控制管脚定义
#define BEEP PBout(5) //蜂鸣器控制管脚定义
#define KEY1 PAin(8) //功能按键对应的管脚
#define BZ_LEFT PAin(13) //左边避障信号
#define BZ_RIGHT PAin(14) //右边避障信号
#define ControlPort PAout(0) //舵机控制接口
#define Stop 0 //舵机停标志
#define Right 1 //舵机右转标志
#define Left 2 //舵机左转标志
#define OLED_RST_Clr() PCout(13)=0 //RST
#define OLED_RST_Set() PCout(13)=1 //RST
#define OLED_RS_Clr() PBout(4)=0 //DC
#define OLED_RS_Set() PBout(4)=1 //DC
#define OLED_SCLK_Clr() PCout(15)=0 //SCL
#define OLED_SCLK_Set() PCout(15)=1 //SCL
#define OLED_SDIN_Clr() PCout(14)=0 //SDA
#define OLED_SDIN_Set() PCout(14)=1 //SDA
#define OLED_CMD 0 //写命令
#define OLED_DATA 1 //写数据
u32 JuLi; //超声波测距
u8 pwmval_left = 0; //左电机调速变量
u8 pwmval_right = 0; //右电机调速变量
u8 pwmval_left_init = 6; //左电机速度值
u8 pwmval_right_init = 6; //右电机速度值
u8 right_pwm = 1; //左电机调速开关
u8 left_pwm = 1; //右电机调速开关
u8 TimeOutCounter = 0;
u8 LeftOrRight = 0;
u16 timer = 0;
u8 hw_flag;
u32 S_temp;
u8 OLED_GRAM[128][8];
const unsigned char oled_asc2_1206[95][12]={
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",0*/
{0x00,0x00,0x00,0x00,0x3F,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*"!",1*/
{0x00,0x00,0x30,0x00,0x40,0x00,0x30,0x00,0x40,0x00,0x00,0x00},/*""",2*/
{0x09,0x00,0x0B,0xC0,0x3D,0x00,0x0B,0xC0,0x3D,0x00,0x09,0x00},/*"#",3*/
{0x18,0xC0,0x24,0x40,0x7F,0xE0,0x22,0x40,0x31,0x80,0x00,0x00},/*"$",4*/
{0x18,0x00,0x24,0xC0,0x1B,0x00,0x0D,0x80,0x32,0x40,0x01,0x80},/*"%",5*/
{0x03,0x80,0x1C,0x40,0x27,0x40,0x1C,0x80,0x07,0x40,0x00,0x40},/*"&",6*/
{0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"'",7*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0x80,0x20,0x40,0x40,0x20},/*"(",8*/
{0x00,0x00,0x40,0x20,0x20,0x40,0x1F,0x80,0x00,0x00,0x00,0x00},/*")",9*/
{0x09,0x00,0x06,0x00,0x1F,0x80,0x06,0x00,0x09,0x00,0x00,0x00},/*"*",10*/
{0x04,0x00,0x04,0x00,0x3F,0x80,0x04,0x00,0x04,0x00,0x00,0x00},/*"+",11*/
{0x00,0x10,0x00,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*",",12*/
{0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x00,0x00},/*"-",13*/
{0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*".",14*/
{0x00,0x20,0x01,0xC0,0x06,0x00,0x38,0x00,0x40,0x00,0x00,0x00},/*"/",15*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"0",16*/
{0x00,0x00,0x10,0x40,0x3F,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"1",17*/
{0x18,0xC0,0x21,0x40,0x22,0x40,0x24,0x40,0x18,0x40,0x00,0x00},/*"2",18*/
{0x10,0x80,0x20,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"3",19*/
{0x02,0x00,0x0D,0x00,0x11,0x00,0x3F,0xC0,0x01,0x40,0x00,0x00},/*"4",20*/
{0x3C,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x23,0x80,0x00,0x00},/*"5",21*/
{0x1F,0x80,0x24,0x40,0x24,0x40,0x34,0x40,0x03,0x80,0x00,0x00},/*"6",22*/
{0x30,0x00,0x20,0x00,0x27,0xC0,0x38,0x00,0x20,0x00,0x00,0x00},/*"7",23*/
{0x1B,0x80,0x24,0x40,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"8",24*/
{0x1C,0x00,0x22,0xC0,0x22,0x40,0x22,0x40,0x1F,0x80,0x00,0x00},/*"9",25*/
{0x00,0x00,0x00,0x00,0x08,0x40,0x00,0x00,0x00,0x00,0x00,0x00},/*":",26*/
{0x00,0x00,0x00,0x00,0x04,0x60,0x00,0x00,0x00,0x00,0x00,0x00},/*";",27*/
{0x00,0x00,0x04,0x00,0x0A,0x00,0x11,0x00,0x20,0x80,0x40,0x40},/*"<",28*/
{0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x09,0x00,0x00,0x00},/*"=",29*/
{0x00,0x00,0x40,0x40,0x20,0x80,0x11,0x00,0x0A,0x00,0x04,0x00},/*">",30*/
{0x18,0x00,0x20,0x00,0x23,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"?",31*/
{0x1F,0x80,0x20,0x40,0x27,0x40,0x29,0x40,0x1F,0x40,0x00,0x00},/*"@",32*/
{0x00,0x40,0x07,0xC0,0x39,0x00,0x0F,0x00,0x01,0xC0,0x00,0x40},/*"A",33*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x40,0x1B,0x80,0x00,0x00},/*"B",34*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x30,0x80,0x00,0x00},/*"C",35*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"D",36*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x40,0x30,0xC0,0x00,0x00},/*"E",37*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x2E,0x00,0x30,0x00,0x00,0x00},/*"F",38*/
{0x0F,0x00,0x10,0x80,0x20,0x40,0x22,0x40,0x33,0x80,0x02,0x00},/*"G",39*/
{0x20,0x40,0x3F,0xC0,0x04,0x00,0x04,0x00,0x3F,0xC0,0x20,0x40},/*"H",40*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x20,0x40,0x20,0x40,0x00,0x00},/*"I",41*/
{0x00,0x60,0x20,0x20,0x20,0x20,0x3F,0xC0,0x20,0x00,0x20,0x00},/*"J",42*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x0B,0x00,0x30,0xC0,0x20,0x40},/*"K",43*/
{0x20,0x40,0x3F,0xC0,0x20,0x40,0x00,0x40,0x00,0x40,0x00,0xC0},/*"L",44*/
{0x3F,0xC0,0x3C,0x00,0x03,0xC0,0x3C,0x00,0x3F,0xC0,0x00,0x00},/*"M",45*/
{0x20,0x40,0x3F,0xC0,0x0C,0x40,0x23,0x00,0x3F,0xC0,0x20,0x00},/*"N",46*/
{0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x1F,0x80,0x00,0x00},/*"O",47*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x24,0x00,0x18,0x00,0x00,0x00},/*"P",48*/
{0x1F,0x80,0x21,0x40,0x21,0x40,0x20,0xE0,0x1F,0xA0,0x00,0x00},/*"Q",49*/
{0x20,0x40,0x3F,0xC0,0x24,0x40,0x26,0x00,0x19,0xC0,0x00,0x40},/*"R",50*/
{0x18,0xC0,0x24,0x40,0x24,0x40,0x22,0x40,0x31,0x80,0x00,0x00},/*"S",51*/
{0x30,0x00,0x20,0x40,0x3F,0xC0,0x20,0x40,0x30,0x00,0x00,0x00},/*"T",52*/
{0x20,0x00,0x3F,0x80,0x00,0x40,0x00,0x40,0x3F,0x80,0x20,0x00},/*"U",53*/
{0x20,0x00,0x3E,0x00,0x01,0xC0,0x07,0x00,0x38,0x00,0x20,0x00},/*"V",54*/
{0x38,0x00,0x07,0xC0,0x3C,0x00,0x07,0xC0,0x38,0x00,0x00,0x00},/*"W",55*/
{0x20,0x40,0x39,0xC0,0x06,0x00,0x39,0xC0,0x20,0x40,0x00,0x00},/*"X",56*/
{0x20,0x00,0x38,0x40,0x07,0xC0,0x38,0x40,0x20,0x00,0x00,0x00},/*"Y",57*/
{0x30,0x40,0x21,0xC0,0x26,0x40,0x38,0x40,0x20,0xC0,0x00,0x00},/*"Z",58*/
{0x00,0x00,0x00,0x00,0x7F,0xE0,0x40,0x20,0x40,0x20,0x00,0x00},/*"[",59*/
{0x00,0x00,0x70,0x00,0x0C,0x00,0x03,0x80,0x00,0x40,0x00,0x00},/*"",60*/
{0x00,0x00,0x40,0x20,0x40,0x20,0x7F,0xE0,0x00,0x00,0x00,0x00},/*"]",61*/
{0x00,0x00,0x20,0x00,0x40,0x00,0x20,0x00,0x00,0x00,0x00,0x00},/*"^",62*/
{0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0x10},/*"_",63*/
{0x00,0x00,0x00,0x00,0x40,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"`",64*/
{0x00,0x00,0x02,0x80,0x05,0x40,0x05,0x40,0x03,0xC0,0x00,0x40},/*"a",65*/
{0x20,0x00,0x3F,0xC0,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"b",66*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x06,0x40,0x00,0x00},/*"c",67*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x24,0x40,0x3F,0xC0,0x00,0x40},/*"d",68*/
{0x00,0x00,0x03,0x80,0x05,0x40,0x05,0x40,0x03,0x40,0x00,0x00},/*"e",69*/
{0x00,0x00,0x04,0x40,0x1F,0xC0,0x24,0x40,0x24,0x40,0x20,0x00},/*"f",70*/
{0x00,0x00,0x02,0xE0,0x05,0x50,0x05,0x50,0x06,0x50,0x04,0x20},/*"g",71*/
{0x20,0x40,0x3F,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"h",72*/
{0x00,0x00,0x04,0x40,0x27,0xC0,0x00,0x40,0x00,0x00,0x00,0x00},/*"i",73*/
{0x00,0x10,0x00,0x10,0x04,0x10,0x27,0xE0,0x00,0x00,0x00,0x00},/*"j",74*/
{0x20,0x40,0x3F,0xC0,0x01,0x40,0x07,0x00,0x04,0xC0,0x04,0x40},/*"k",75*/
{0x20,0x40,0x20,0x40,0x3F,0xC0,0x00,0x40,0x00,0x40,0x00,0x00},/*"l",76*/
{0x07,0xC0,0x04,0x00,0x07,0xC0,0x04,0x00,0x03,0xC0,0x00,0x00},/*"m",77*/
{0x04,0x40,0x07,0xC0,0x04,0x40,0x04,0x00,0x03,0xC0,0x00,0x40},/*"n",78*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x40,0x03,0x80,0x00,0x00},/*"o",79*/
{0x04,0x10,0x07,0xF0,0x04,0x50,0x04,0x40,0x03,0x80,0x00,0x00},/*"p",80*/
{0x00,0x00,0x03,0x80,0x04,0x40,0x04,0x50,0x07,0xF0,0x00,0x10},/*"q",81*/
{0x04,0x40,0x07,0xC0,0x02,0x40,0x04,0x00,0x04,0x00,0x00,0x00},/*"r",82*/
{0x00,0x00,0x06,0x40,0x05,0x40,0x05,0x40,0x04,0xC0,0x00,0x00},/*"s",83*/
{0x00,0x00,0x04,0x00,0x1F,0x80,0x04,0x40,0x00,0x40,0x00,0x00},/*"t",84*/
{0x04,0x00,0x07,0x80,0x00,0x40,0x04,0x40,0x07,0xC0,0x00,0x40},/*"u",85*/
{0x04,0x00,0x07,0x00,0x04,0xC0,0x01,0x80,0x06,0x00,0x04,0x00},/*"v",86*/
{0x06,0x00,0x01,0xC0,0x07,0x00,0x01,0xC0,0x06,0x00,0x00,0x00},/*"w",87*/
{0x04,0x40,0x06,0xC0,0x01,0x00,0x06,0xC0,0x04,0x40,0x00,0x00},/*"x",88*/
{0x04,0x10,0x07,0x10,0x04,0xE0,0x01,0x80,0x06,0x00,0x04,0x00},/*"y",89*/
{0x00,0x00,0x04,0x40,0x05,0xC0,0x06,0x40,0x04,0x40,0x00,0x00},/*"z",90*/
{0x00,0x00,0x00,0x00,0x04,0x00,0x7B,0xE0,0x40,0x20,0x00,0x00},/*"{",91*/
{0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xF0,0x00,0x00,0x00,0x00},/*"|",92*/
{0x00,0x00,0x40,0x20,0x7B,0xE0,0x04,0x00,0x00,0x00,0x00,0x00},/*"}",93*/
{0x40,0x00,0x80,0x00,0x40,0x00,0x20,0x00,0x20,0x00,0x40,0x00},/*"~",94*/
};
const unsigned char oled_asc2_1608[95][16]={
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",0*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x1F,0xCC,0x00,0x0C,0x00,0x00,0x00,0x00,0x00,0x00},/*"!",1*/
{0x00,0x00,0x08,0x00,0x30,0x00,0x60,0x00,0x08,0x00,0x30,0x00,0x60,0x00,0x00,0x00},/*""",2*/
{0x02,0x20,0x03,0xFC,0x1E,0x20,0x02,0x20,0x03,0xFC,0x1E,0x20,0x02,0x20,0x00,0x00},/*"#",3*/
{0x00,0x00,0x0E,0x18,0x11,0x04,0x3F,0xFF,0x10,0x84,0x0C,0x78,0x00,0x00,0x00,0x00},/*"$",4*/
{0x0F,0x00,0x10,0x84,0x0F,0x38,0x00,0xC0,0x07,0x78,0x18,0x84,0x00,0x78,0x00,0x00},/*"%",5*/
{0x00,0x78,0x0F,0x84,0x10,0xC4,0x11,0x24,0x0E,0x98,0x00,0xE4,0x00,0x84,0x00,0x08},/*"&",6*/
{0x08,0x00,0x68,0x00,0x70,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"'",7*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x07,0xE0,0x18,0x18,0x20,0x04,0x40,0x02,0x00,0x00},/*"(",8*/
{0x00,0x00,0x40,0x02,0x20,0x04,0x18,0x18,0x07,0xE0,0x00,0x00,0x00,0x00,0x00,0x00},/*")",9*/
{0x02,0x40,0x02,0x40,0x01,0x80,0x0F,0xF0,0x01,0x80,0x02,0x40,0x02,0x40,0x00,0x00},/*"*",10*/
{0x00,0x80,0x00,0x80,0x00,0x80,0x0F,0xF8,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x00},/*"+",11*/
{0x00,0x01,0x00,0x0D,0x00,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*",",12*/
{0x00,0x00,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80},/*"-",13*/
{0x00,0x00,0x00,0x0C,0x00,0x0C,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*".",14*/
{0x00,0x00,0x00,0x06,0x00,0x18,0x00,0x60,0x01,0x80,0x06,0x00,0x18,0x00,0x20,0x00},/*"/",15*/
{0x00,0x00,0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"0",16*/
{0x00,0x00,0x08,0x04,0x08,0x04,0x1F,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"1",17*/
{0x00,0x00,0x0E,0x0C,0x10,0x14,0x10,0x24,0x10,0x44,0x11,0x84,0x0E,0x0C,0x00,0x00},/*"2",18*/
{0x00,0x00,0x0C,0x18,0x10,0x04,0x11,0x04,0x11,0x04,0x12,0x88,0x0C,0x70,0x00,0x00},/*"3",19*/
{0x00,0x00,0x00,0xE0,0x03,0x20,0x04,0x24,0x08,0x24,0x1F,0xFC,0x00,0x24,0x00,0x00},/*"4",20*/
{0x00,0x00,0x1F,0x98,0x10,0x84,0x11,0x04,0x11,0x04,0x10,0x88,0x10,0x70,0x00,0x00},/*"5",21*/
{0x00,0x00,0x07,0xF0,0x08,0x88,0x11,0x04,0x11,0x04,0x18,0x88,0x00,0x70,0x00,0x00},/*"6",22*/
{0x00,0x00,0x1C,0x00,0x10,0x00,0x10,0xFC,0x13,0x00,0x1C,0x00,0x10,0x00,0x00,0x00},/*"7",23*/
{0x00,0x00,0x0E,0x38,0x11,0x44,0x10,0x84,0x10,0x84,0x11,0x44,0x0E,0x38,0x00,0x00},/*"8",24*/
{0x00,0x00,0x07,0x00,0x08,0x8C,0x10,0x44,0x10,0x44,0x08,0x88,0x07,0xF0,0x00,0x00},/*"9",25*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x03,0x0C,0x03,0x0C,0x00,0x00,0x00,0x00,0x00,0x00},/*":",26*/
{0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*";",27*/
{0x00,0x00,0x00,0x80,0x01,0x40,0x02,0x20,0x04,0x10,0x08,0x08,0x10,0x04,0x00,0x00},/*"<",28*/
{0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x02,0x20,0x00,0x00},/*"=",29*/
{0x00,0x00,0x10,0x04,0x08,0x08,0x04,0x10,0x02,0x20,0x01,0x40,0x00,0x80,0x00,0x00},/*">",30*/
{0x00,0x00,0x0E,0x00,0x12,0x00,0x10,0x0C,0x10,0x6C,0x10,0x80,0x0F,0x00,0x00,0x00},/*"?",31*/
{0x03,0xE0,0x0C,0x18,0x13,0xE4,0x14,0x24,0x17,0xC4,0x08,0x28,0x07,0xD0,0x00,0x00},/*"@",32*/
{0x00,0x04,0x00,0x3C,0x03,0xC4,0x1C,0x40,0x07,0x40,0x00,0xE4,0x00,0x1C,0x00,0x04},/*"A",33*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x04,0x11,0x04,0x0E,0x88,0x00,0x70,0x00,0x00},/*"B",34*/
{0x03,0xE0,0x0C,0x18,0x10,0x04,0x10,0x04,0x10,0x04,0x10,0x08,0x1C,0x10,0x00,0x00},/*"C",35*/
{0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"D",36*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x04,0x17,0xC4,0x10,0x04,0x08,0x18,0x00,0x00},/*"E",37*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x00,0x17,0xC0,0x10,0x00,0x08,0x00,0x00,0x00},/*"F",38*/
{0x03,0xE0,0x0C,0x18,0x10,0x04,0x10,0x04,0x10,0x44,0x1C,0x78,0x00,0x40,0x00,0x00},/*"G",39*/
{0x10,0x04,0x1F,0xFC,0x10,0x84,0x00,0x80,0x00,0x80,0x10,0x84,0x1F,0xFC,0x10,0x04},/*"H",40*/
{0x00,0x00,0x10,0x04,0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x04,0x00,0x00,0x00,0x00},/*"I",41*/
{0x00,0x03,0x00,0x01,0x10,0x01,0x10,0x01,0x1F,0xFE,0x10,0x00,0x10,0x00,0x00,0x00},/*"J",42*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x03,0x80,0x14,0x64,0x18,0x1C,0x10,0x04,0x00,0x00},/*"K",43*/
{0x10,0x04,0x1F,0xFC,0x10,0x04,0x00,0x04,0x00,0x04,0x00,0x04,0x00,0x0C,0x00,0x00},/*"L",44*/
{0x10,0x04,0x1F,0xFC,0x1F,0x00,0x00,0xFC,0x1F,0x00,0x1F,0xFC,0x10,0x04,0x00,0x00},/*"M",45*/
{0x10,0x04,0x1F,0xFC,0x0C,0x04,0x03,0x00,0x00,0xE0,0x10,0x18,0x1F,0xFC,0x10,0x00},/*"N",46*/
{0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},/*"O",47*/
{0x10,0x04,0x1F,0xFC,0x10,0x84,0x10,0x80,0x10,0x80,0x10,0x80,0x0F,0x00,0x00,0x00},/*"P",48*/
{0x07,0xF0,0x08,0x18,0x10,0x24,0x10,0x24,0x10,0x1C,0x08,0x0A,0x07,0xF2,0x00,0x00},/*"Q",49*/
{0x10,0x04,0x1F,0xFC,0x11,0x04,0x11,0x00,0x11,0xC0,0x11,0x30,0x0E,0x0C,0x00,0x04},/*"R",50*/
{0x00,0x00,0x0E,0x1C,0x11,0x04,0x10,0x84,0x10,0x84,0x10,0x44,0x1C,0x38,0x00,0x00},/*"S",51*/
{0x18,0x00,0x10,0x00,0x10,0x04,0x1F,0xFC,0x10,0x04,0x10,0x00,0x18,0x00,0x00,0x00},/*"T",52*/
{0x10,0x00,0x1F,0xF8,0x10,0x04,0x00,0x04,0x00,0x04,0x10,0x04,0x1F,0xF8,0x10,0x00},/*"U",53*/
{0x10,0x00,0x1E,0x00,0x11,0xE0,0x00,0x1C,0x00,0x70,0x13,0x80,0x1C,0x00,0x10,0x00},/*"V",54*/
{0x1F,0xC0,0x10,0x3C,0x00,0xE0,0x1F,0x00,0x00,0xE0,0x10,0x3C,0x1F,0xC0,0x00,0x00},/*"W",55*/
{0x10,0x04,0x18,0x0C,0x16,0x34,0x01,0xC0,0x01,0xC0,0x16,0x34,0x18,0x0C,0x10,0x04},/*"X",56*/
{0x10,0x00,0x1C,0x00,0x13,0x04,0x00,0xFC,0x13,0x04,0x1C,0x00,0x10,0x00,0x00,0x00},/*"Y",57*/
{0x08,0x04,0x10,0x1C,0x10,0x64,0x10,0x84,0x13,0x04,0x1C,0x04,0x10,0x18,0x00,0x00},/*"Z",58*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x7F,0xFE,0x40,0x02,0x40,0x02,0x40,0x02,0x00,0x00},/*"[",59*/
{0x00,0x00,0x30,0x00,0x0C,0x00,0x03,0x80,0x00,0x60,0x00,0x1C,0x00,0x03,0x00,0x00},/*"",60*/
{0x00,0x00,0x40,0x02,0x40,0x02,0x40,0x02,0x7F,0xFE,0x00,0x00,0x00,0x00,0x00,0x00},/*"]",61*/
{0x00,0x00,0x00,0x00,0x20,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x00,0x00},/*"^",62*/
{0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01},/*"_",63*/
{0x00,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"`",64*/
{0x00,0x00,0x00,0x98,0x01,0x24,0x01,0x44,0x01,0x44,0x01,0x44,0x00,0xFC,0x00,0x04},/*"a",65*/
{0x10,0x00,0x1F,0xFC,0x00,0x88,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x70,0x00,0x00},/*"b",66*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x00},/*"c",67*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x11,0x08,0x1F,0xFC,0x00,0x04},/*"d",68*/
{0x00,0x00,0x00,0xF8,0x01,0x44,0x01,0x44,0x01,0x44,0x01,0x44,0x00,0xC8,0x00,0x00},/*"e",69*/
{0x00,0x00,0x01,0x04,0x01,0x04,0x0F,0xFC,0x11,0x04,0x11,0x04,0x11,0x00,0x18,0x00},/*"f",70*/
{0x00,0x00,0x00,0xD6,0x01,0x29,0x01,0x29,0x01,0x29,0x01,0xC9,0x01,0x06,0x00,0x00},/*"g",71*/
{0x10,0x04,0x1F,0xFC,0x00,0x84,0x01,0x00,0x01,0x00,0x01,0x04,0x00,0xFC,0x00,0x04},/*"h",72*/
{0x00,0x00,0x01,0x04,0x19,0x04,0x19,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"i",73*/
{0x00,0x00,0x00,0x03,0x00,0x01,0x01,0x01,0x19,0x01,0x19,0xFE,0x00,0x00,0x00,0x00},/*"j",74*/
{0x10,0x04,0x1F,0xFC,0x00,0x24,0x00,0x40,0x01,0xB4,0x01,0x0C,0x01,0x04,0x00,0x00},/*"k",75*/
{0x00,0x00,0x10,0x04,0x10,0x04,0x1F,0xFC,0x00,0x04,0x00,0x04,0x00,0x00,0x00,0x00},/*"l",76*/
{0x01,0x04,0x01,0xFC,0x01,0x04,0x01,0x00,0x01,0xFC,0x01,0x04,0x01,0x00,0x00,0xFC},/*"m",77*/
{0x01,0x04,0x01,0xFC,0x00,0x84,0x01,0x00,0x01,0x00,0x01,0x04,0x00,0xFC,0x00,0x04},/*"n",78*/
{0x00,0x00,0x00,0xF8,0x01,0x04,0x01,0x04,0x01,0x04,0x01,0x04,0x00,0xF8,0x00,0x00},/*"o",79*/
{0x01,0x01,0x01,0xFF,0x00,0x85,0x01,0x04,0x01,0x04,0x00,0x88,0x00,0x70,0x00,0x00},/*"p",80*/
{0x00,0x00,0x00,0x70,0x00,0x88,0x01,0x04,0x01,0x04,0x01,0x05,0x01,0xFF,0x00,0x01},/*"q",81*/
{0x01,0x04,0x01,0x04,0x01,0xFC,0x00,0x84,0x01,0x04,0x01,0x00,0x01,0x80,0x00,0x00},/*"r",82*/
{0x00,0x00,0x00,0xCC,0x01,0x24,0x01,0x24,0x01,0x24,0x01,0x24,0x01,0x98,0x00,0x00},/*"s",83*/
{0x00,0x00,0x01,0x00,0x01,0x00,0x07,0xF8,0x01,0x04,0x01,0x04,0x00,0x00,0x00,0x00},/*"t",84*/
{0x01,0x00,0x01,0xF8,0x00,0x04,0x00,0x04,0x00,0x04,0x01,0x08,0x01,0xFC,0x00,0x04},/*"u",85*/
{0x01,0x00,0x01,0x80,0x01,0x70,0x00,0x0C,0x00,0x10,0x01,0x60,0x01,0x80,0x01,0x00},/*"v",86*/
{0x01,0xF0,0x01,0x0C,0x00,0x30,0x01,0xC0,0x00,0x30,0x01,0x0C,0x01,0xF0,0x01,0x00},/*"w",87*/
{0x00,0x00,0x01,0x04,0x01,0x8C,0x00,0x74,0x01,0x70,0x01,0x8C,0x01,0x04,0x00,0x00},/*"x",88*/
{0x01,0x01,0x01,0x81,0x01,0x71,0x00,0x0E,0x00,0x18,0x01,0x60,0x01,0x80,0x01,0x00},/*"y",89*/
{0x00,0x00,0x01,0x84,0x01,0x0C,0x01,0x34,0x01,0x44,0x01,0x84,0x01,0x0C,0x00,0x00},/*"z",90*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x00,0x3E,0xFC,0x40,0x02,0x40,0x02},/*"{",91*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF,0x00,0x00,0x00,0x00,0x00,0x00},/*"|",92*/
{0x00,0x00,0x40,0x02,0x40,0x02,0x3E,0xFC,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"}",93*/
{0x00,0x00,0x60,0x00,0x80,0x00,0x80,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x20,0x00},/*"~",94*/
};
void Motor_Init(void); //电机接口初始化
void forward(void); //小车前进控制函数
void back(void); //小车后退控制函数
void left_turn(void); //向左转
void right_turn(void); //向右转
void stop(void); //停车
void circle_left(void); //原地向左转圈
void circle_right(void); //原地向右转圈
void left_moto(void); //左电机调速函数
void right_moto(void); //右电机调速函数
void Timer1_Init(u16 arr,u16 psc); //定时器1初始化函数
void Timer2_Init(u16 arr,u16 psc); //定时器2初始化函数
void Timer3_Init(u16 arr,u16 psc); //定时器3初始化函数
void Beep_Init(void); //蜂鸣器接口初始化
void Key_Init(void); //按键接口初始化函数
void Key_Scan(void); //按键1扫描函数
void Bz_Init(void); //红外避障信号接口初始化函数
void OLED_WR_Byte(u8 dat,u8 cmd);
void OLED_Display_On(void);
void OLED_Display_Off(void);
void OLED_Refresh_Gram(void);
void Oled_Init(void);
void OLED_Clear(void);
void OLED_DrawPoint(u8 x,u8 y,u8 t);
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode);
void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size);
void OLED_ShowString(u8 x,u8 y,const u8 *p);
void Oled_Show(void);
void Dj_Init(void);
void ControlLeftOrRight(void);
void Hw_bz(void);
void process(void);
/****************************************************************
程序功能
将超声波模块、舵机安装好并连接好杜邦线。智能小车上电后,按下开发
板启动按键(靠近电源开关那个)小车开始避障碍运动。同时测到的距离
值会在OLED中显示出来。
接线说明:
电机驱动线:
开发板的PA2接小车底盘的M6
开发板的PA3接小车底盘的M5
开发板的PA4接小车底盘的M4
开发板的PA5接小车底盘的M3
开发板的PA6接小车底盘的M2
开发板的PA7接小车底盘的M1
超声波模块接线:
超声波模块的VCC接开发板的5V
超声波模块的GND接开发板的GND
超声波模块的Trig接开发板的PB1
超声波模块的Echo接开发板的PB0
舵机接线:
将舵机线接到小车底盘的舵机接口上(注意方向,舵机棕线是GND,红线是VCC,
橙线是信号线。它们分别对应小车底盘舵机接口上的GND,5V和S)。另外,舵机
的信号线需要一条单独的杜邦线连接到开发板的PA0。
电源线:
开发板的5V接小车底盘的5V
开发板的GND接小车底盘的GND
红外避障信号线:
开发板的PA13接小车底盘的H3
开发板的PA14接小车底盘的H4
(本实验采用红外避障作为超声波避障的辅助,所以红外避障信号线也要
连接)
****************************************************************/
int main(void)
{
u8 k;
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72); //延时初始化
JTAG_Set(JTAG_SWD_DISABLE); //关闭JTAG接口
JTAG_Set(SWD_ENABLE); //打开SWD接口
Oled_Init(); //OLED初始化
Timer3_Init(0XFFFF,72-1); //超声波初始化
Timer1_Init(499,7199);
Motor_Init(); //初始化与电机连接的硬件接口
Timer2_Init(25,719); //10Khz的计数频率,计数到9为1ms
Beep_Init(); //蜂鸣器接口初始化
Key_Init(); //按键接口初始化
Bz_Init(); //红外避障信号接口初始化
Dj_Init(); //舵机控制接口初始化
ControlLeftOrRight(); //舵机初始化
Key_Scan(); //按键扫描
while(1)
{
if(timer>=400)
{
timer = 0;
Oled_Show(); //oled显示提示信息
S_temp = JuLi; //超声波模块测到的距离值
Hw_bz(); //红外避障
if((S_temp>=250)&&(hw_flag == 0)) //如果不满足避障条件(超声波模块测到前方障碍物距离大于25厘米或红外避障感应到前方有障碍物)
{
BEEP = 1;
forward(); //智能小车继续前进
}
else //如果满足避障条件
{
BEEP = 0; //蜂鸣器响
stop(); //智能小车停下
for(k=0;k<=8;k++)
{
delay_ms(1000);
}
BEEP = 1; //蜂鸣器不响
process(); //避障处理
}
}
Oled_Show(); //OLED显示信息
}
}
void Dj_Init(void) //舵机控制接口初始化函数
{
RCC->APB2ENR|=1<<2; //使能PORTA口时钟
GPIOA->CRL&=0XFFFFFFF0; //PORTA.0 推挽输出
GPIOA->CRL|=0X00000003;
GPIOA->ODR|=1<<0; //输出1
}
void ControlLeftOrRight(void) //舵机自检函数
{
u8 i;
LeftOrRight = Stop; //舵机停在中间
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
LeftOrRight = Left; //舵机左边
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
LeftOrRight = Right; //舵机右边
TimeOutCounter = 0;
for(i=0;i<=13;i++)
{
delay_ms(1000);
}
LeftOrRight = Stop; //舵机停在中间
TimeOutCounter = 0;
for(i=0;i<=9;i++)
{
delay_ms(1000);
}
}
void Hw_bz(void) //红外避障函数
{
if((BZ_LEFT == 0)||(BZ_RIGHT == 0)) //如果左右两边任何一个红外避障模块感应到障碍物
{
hw_flag = 1; //设置红外避障标志
}
else
{
hw_flag = 0; //屏蔽红外避障标志
}
}
void Beep_Init(void) //蜂鸣器接口初始化
{
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFF0FFFFF;
GPIOB->CRL|=0X00300000; //PB5推挽输出
GPIOB->ODR|=1<<5; //PB5输出高
}
void Bz_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRH&=0XFF0FFFFF;
GPIOA->CRH|=0X00800000; //PA13上拉输入
GPIOA->ODR|=1<<13; //PA13上拉
GPIOA->CRH&=0XF0FFFFFF;
GPIOA->CRH|=0X08000000; //PA14上拉输入
GPIOA->ODR|=1<<14; //PA14上拉
}
void Key_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000008; //PA8上拉输入
GPIOA->ODR|=1<<8; //PA8上拉
}
void Key_Scan(void) //按键扫描函数
{
LOOP:if(KEY1==0) //第一次判断是否有按键按下
{
delay_ms(5);
if(KEY1==0) //第二次判断是否有按键按下
{
BEEP = 0; //蜂鸣器响
while(KEY1 == 0); //等待按键松开
BEEP = 1; //蜂鸣器不响
}
else
{
goto LOOP; //第一次判断时如果按键没有按下重新扫描
}
}
else
{
goto LOOP; //第二次判断时如果按键没有按下重新扫描
}
}
void Motor_Init(void)
{
RCC->APB2ENR|=1<<2; //使能PORTA接口时钟
GPIOA->CRL&=0XFFFFF0FF;
GPIOA->CRL|=0X00000300; //PA2推挽输出
GPIOA->ODR|=1<<2; //PA2输出高电平
GPIOA->CRL&=0XFFFF0FFF;
GPIOA->CRL|=0X00003000; //PA3推挽输出
GPIOA->ODR|=1<<3; //PA3输出高电平
GPIOA->CRL&=0XFFF0FFFF;
GPIOA->CRL|=0X00030000; //PA4推挽输出
GPIOA->ODR|=1<<4; //PA4输出高电平
GPIOA->CRL&=0XFF0FFFFF;
GPIOA->CRL|=0X00300000; //PA5推挽输出
GPIOA->ODR|=1<<5; //PA5输出高电平
GPIOA->CRL&=0XF0FFFFFF;
GPIOA->CRL|=0X03000000; //PA6推挽输出
GPIOA->ODR|=1<<6; //PA6输出高电平
GPIOA->CRL&=0X0FFFFFFF;
GPIOA->CRL|=0X30000000; //PA7推挽输出
GPIOA->ODR|=1<<7; //PA7输出高电平
}
void forward(void) //小车前进控制函数
{
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void back(void) //小车后退控制函数
{
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
}
void left_turn(void) //向左转
{
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
void right_turn(void) //向右转
{
IN1 = 0;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void stop(void) //停车
{
IN1 = 0;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}
void circle_left(void) //原地向左转圈
{
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 1;
}
void circle_right(void) //原地向右转圈
{
IN1 = 0;
IN2 = 1;
IN3 = 1;
IN4 = 0;
}
void left_moto(void) //左电机调速函数
{
if(left_pwm)
{
if(pwmval_left <= pwmval_left_init)
{
EN1 = 1;
}
else
{
EN1 = 0;
}
if(pwmval_left >= 20)
{
pwmval_left = 0;
}
}
else
{
EN1 = 0;
}
}
void right_moto(void) //右电机调速函数
{
if(right_pwm)
{
if(pwmval_right <= pwmval_right_init)
{
EN2 = 1;
}
else if(pwmval_right > pwmval_right_init)
{
EN2 = 0;
}
if(pwmval_right >= 20)
{
pwmval_right = 0;
}
}
else
{
EN2 = 0;
}
}
void OLED_Refresh_Gram(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //设置页地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //设置显示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //设置显示位置—列高地址
for(n=0;n<128;n++)
{
OLED_WR_Byte(OLED_GRAM[n]
,OLED_DATA);
}
}
}
void OLED_WR_Byte(u8 dat,u8 cmd)
{
u8 i;
if(cmd)
{
OLED_RS_Set();
}
else
{
OLED_RS_Clr();
}
for(i=0;i<8;i++)
{
OLED_SCLK_Clr();
if(dat&0x80)
{
OLED_SDIN_Set();
}
else
{
OLED_SDIN_Clr();
}
OLED_SCLK_Set();
dat<<=1;
}
OLED_RS_Set();
}
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)for(n=0;n<128;n++)OLED_GRAM[n]=0X00;
OLED_Refresh_Gram(); //更新显示
}
void OLED_DrawPoint(u8 x,u8 y,u8 t)
{
u8 pos,bx,temp=0;
if(x>127||y>63)return; //超出范围了.
pos=7-y/8;
bx=y%8;
temp=1<<(7-bx);
if(t)OLED_GRAM[x][pos]|=temp;
else OLED_GRAM[x][pos]&=~temp;
}
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode)
{
u8 temp,t,t1;
u8 y0=y;
chr=chr-' '; //得到偏移后的值
for(t=0;t
{
if(size==12) //调用1206字体
{
temp=oled_asc2_1206[chr][t];
}
else //调用1608字体
{
temp=oled_asc2_1608[chr][t];
}
for(t1=0;t1<8;t1++)
{
if(temp&0x80)
{
OLED_DrawPoint(x,y,mode);
}
else
{
OLED_DrawPoint(x,y,!mode);
}
temp<<=1;
y++;
if((y-y0)==size)
{
y=y0;
x++;
break;
}
}
}
}
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t
{
temp=(num/oled_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size/2)*t,y,' ',size,1);
continue;
}
else
{
enshow=1;
}
}
OLED_ShowChar(x+(size/2)*t,y,temp+'0',size,1);
}
}
void OLED_ShowString(u8 x,u8 y,const u8 *p)
{
#define MAX_CHAR_POSX 122
#define MAX_CHAR_POSY 58
while(*p!='�')
{
if(x>MAX_CHAR_POSX){x=0;y+=16;}
if(y>MAX_CHAR_POSY){y=x=0;OLED_Clear();}
OLED_ShowChar(x,y,*p,12,1);
x+=8;
p++;
}
}
void Oled_Init(void)
{
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFFF0FFFF;
GPIOB->CRL|=0X00020000; //PB4 推挽输出
RCC->APB2ENR|=1<<4; //使能PORTC时钟
RCC->APB2ENR|=1<<0; //使能AFIO时钟
GPIOC->CRH&=0X000FFFFF; //PC13,14,15设置成输出 2MHz 推挽输出
GPIOC->CRH|=0X22200000;
PWR->CR|=1<<8; //取消备份区写保护
RCC->BDCR&=0xFFFFFFFE; //外部低俗振荡器关闭 PC14,PC15成为普通IO
BKP->CR&=0xFFFFFFFE; //侵入检测TAMPER引脚作为通用IO口使用
PWR->CR&=0xFFFFFEFF; //备份区写保护
OLED_RST_Clr();
delay_ms(100);
OLED_RST_Set();
OLED_WR_Byte(0xAE,OLED_CMD); //关闭显示
OLED_WR_Byte(0xD5,OLED_CMD); //设置时钟分频因子,震荡频率
OLED_WR_Byte(80,OLED_CMD); //[3:0],分频因子;[7:4],震荡频率
OLED_WR_Byte(0xA8,OLED_CMD); //设置驱动路数
OLED_WR_Byte(0X3F,OLED_CMD); //默认0X3F(1/64)
OLED_WR_Byte(0xD3,OLED_CMD); //设置显示偏移
OLED_WR_Byte(0X00,OLED_CMD); //默认为0
OLED_WR_Byte(0x40,OLED_CMD); //设置显示开始行 [5:0],行数.
OLED_WR_Byte(0x8D,OLED_CMD); //电荷泵设置
OLED_WR_Byte(0x14,OLED_CMD); //bit2,开启/关闭
OLED_WR_Byte(0x20,OLED_CMD); //设置内存地址模式
OLED_WR_Byte(0x02,OLED_CMD); //[1:0],00,列地址模式;01,行地址模式;10,页地址模式;默认10;
OLED_WR_Byte(0xA1,OLED_CMD); //段重定义设置,bit0:0,0->0;1,0->127;
OLED_WR_Byte(0xC0,OLED_CMD); //设置COM扫描方向;bit3:0,普通模式;1,重定义模式 COM[N-1]->COM0;N:驱动路数
OLED_WR_Byte(0xDA,OLED_CMD); //设置COM硬件引脚配置
OLED_WR_Byte(0x12,OLED_CMD); //[5:4]配置
OLED_WR_Byte(0x81,OLED_CMD); //对比度设置
OLED_WR_Byte(0xEF,OLED_CMD); //1~255;默认0X7F (亮度设置,越大越亮)
OLED_WR_Byte(0xD9,OLED_CMD); //设置预充电周期
OLED_WR_Byte(0xf1,OLED_CMD); //[3:0],PHASE 1;[7:4],PHASE 2;
OLED_WR_Byte(0xDB,OLED_CMD); //设置VCOMH 电压倍率
OLED_WR_Byte(0x30,OLED_CMD); //[6:4] 000,0.65*vcc;001,0.77*vcc;011,0.83*vcc;
OLED_WR_Byte(0xA4,OLED_CMD); //全局显示开启;bit0:1,开启;0,关闭;(白屏/黑屏)
OLED_WR_Byte(0xA6,OLED_CMD); //设置显示方式;bit0:1,反相显示;0,正常显示
OLED_WR_Byte(0xAF,OLED_CMD); //开启显示
OLED_Clear();
}
void Oled_Show(void)
{
OLED_ShowString(20,10,"ChaoSB-TEST");
OLED_ShowString(0,30,"Distance:");
OLED_ShowNumber(80,30,(u16)JuLi,4,12);
OLED_ShowString(110,30,"mm");
OLED_Refresh_Gram(); //刷新
}
void process(void) //避障处理函数
{
u8 j;
u8 p;
u32 S1_temp = 0;
u32 S2_temp = 0;
LeftOrRight = Left; //舵机转到左边
TimeOutCounter = 0;
for(j=0;j<=9;j++)
{
delay_ms(1000);
}
Oled_Show(); //显示障碍物距离信息
S1_temp = JuLi; //小车左边障碍物距离存在变量S1_temp中
LeftOrRight = Right; //舵机转到右边
TimeOutCounter = 0;
for(j=0;j<=13;j++)
{
delay_ms(1000);
}
Oled_Show(); //显示障碍物距离信息
S2_temp = JuLi; //小车右边障碍物距离存在变量S2_temp中
LeftOrRight = Stop; //舵机回到中间
TimeOutCounter = 0;
for(j=0;j<=9;j++)
{
delay_ms(1000);
}
if((S1_temp<=200)||(S2_temp<=200)) //如果超声波模块测得左边或右边障碍物的距离小于20厘米
{
back(); //小车后退
for(p=0;p<=10;p++)
{
delay_ms(1000);
}
}
else
{
back(); //小车后退
for(p=0;p<=8;p++)
{
delay_ms(1000);
}
}
stop(); //小车停下
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
if(S1_temp>S2_temp) //如果左边障碍物离小车远
{
circle_left(); //小车向左转
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
}
else if(S1_temp
{
circle_right(); //小车向右转
for(p=0;p<=2;p++)
{
delay_ms(1000);
}
}
}
void Timer3_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<1; //TIM3时钟使能
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRL&=0XFFFFFF00;
GPIOB->CRL|=0X00000028; //PB.0 输入 PB.1输出
TIM3->ARR=arr; //设定计数器自动重装值
TIM3->PSC=psc; //预分频器
TIM3->CCMR2|=1<<0; //选择输入端
TIM3->CCMR2|=0<<4; //配置输入滤波器 不滤波
TIM3->CCMR2|=0<<2; //配置输入分频,不分频
TIM3->CCER|=0<<9; //上升沿捕获
TIM3->CCER|=1<<8; //允许捕获计数器的值到捕获寄存器中
TIM3->DIER|=1<<3; //允许捕获中断
TIM3->DIER|=1<<0; //允许更新中断
TIM3->CR1|=0x01; //使能定时器3
MY_NVIC_Init(1,3,TIM3_IRQChannel,1);
}
/**************************************************************************
函数功能:超声波接收回波函数
入口参数:无
返回 值:无
**************************************************************************/
u16 TIM3CH3_CAPTURE_STA,TIM3CH3_CAPTURE_VAL;
void Read_Distane(void)
{
PBout(1)=1;
delay_us(15);
PBout(1)=0;
if(TIM3CH3_CAPTURE_STA&0X80) //成功捕获到了一次高电平
{
JuLi=TIM3CH3_CAPTURE_STA&0X3F;
JuLi*=65536; //溢出时间总和
JuLi+=TIM3CH3_CAPTURE_VAL; //得到总的高电平时间
JuLi=JuLi*170/1000;
TIM3CH3_CAPTURE_STA=0; //开启下一次捕获
}
}
/**************************************************************************
函数功能:超声波回波脉宽读取中断
入口参数:无
返回 值:无
**************************************************************************/
void TIM3_IRQHandler(void)
{
u16 tsr;
tsr=TIM3->SR;
if((TIM3CH3_CAPTURE_STA&0X80)==0) //还未成功捕获
{
if(tsr&0X01) //溢出
{
if(TIM3CH3_CAPTURE_STA&0X40) //已经捕获到高电平了
{
if((TIM3CH3_CAPTURE_STA&0X3F)==0X3F) //高电平太长了
{
TIM3CH3_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM3CH3_CAPTURE_VAL=0XFFFF;
}
else
{
TIM3CH3_CAPTURE_STA++;
}
}
}
if(tsr&0x08) //捕获3发生捕获事件
{
if(TIM3CH3_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM3CH3_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
TIM3CH3_CAPTURE_VAL=TIM3->CCR3; //获取当前的捕获值.
TIM3->CCER&=~(1<<9); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM3CH3_CAPTURE_STA=0; //清空
TIM3CH3_CAPTURE_VAL=0;
TIM3CH3_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM3->CNT=0; //计数器清空
TIM3->CCER|=1<<9; //CC1P=1 设置为下降沿捕获
}
}
}
TIM3->SR=0; //清除中断标志位
}
/**************************************************************************
函数功能:定时中断初始化
入口参数:arr:自动重装值 psc:时钟预分频数
返回 值:无
**************************************************************************/
void Timer1_Init(u16 arr,u16 psc)
{
RCC->APB2ENR|=1<<11; //TIM1时钟使能
TIM1->ARR=arr; //设定计数器自动重装值
TIM1->PSC=psc; //预分频器7200,得到10Khz的计数时钟
TIM1->DIER|=1<<0; //允许更新中断
TIM1->DIER|=1<<6; //允许触发中断
TIM1->CR1|=0x01; //使能定时器
MY_NVIC_Init(1,3,TIM1_UP_IRQChannel,2);
}
/**************************************************************************
函数功能:定时中断初始化
入口参数:arr:自动重装值 psc:时钟预分频数
返回 值:无
**************************************************************************/
int TIM1_UP_IRQHandler(void)
{
if(TIM1->SR&0X0001) //5ms定时中断
{
TIM1->SR&=~(1<<0); //清除定时器1中断标志位
}
Read_Distane();
return 0;
}
//定时器3中断服务程序
void TIM2_IRQHandler(void)
{
if(TIM2->SR&0X0001) //溢出中断
{
TimeOutCounter ++;
timer++;
switch(LeftOrRight)
{
case 0 : //1.5ms
{
if(TimeOutCounter<=6)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
case 1 : //1ms
{
if(TimeOutCounter<=4)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
case 2 : //2ms
{
if(TimeOutCounter<=8)
{
ControlPort = 1;
}
else
{
ControlPort = 0;
}
}break;
default : break;
}
if(TimeOutCounter <= 30)
{
EN1 = 1;
EN2 = 1;
}
else if(TimeOutCounter > 30)
{
EN1 = 0;
EN2 = 0;
}
if(TimeOutCounter==80) //20ms
{
TimeOutCounter = 0;
}
}
TIM2->SR&=~(1<<0); //清除中断标志位
}
//通用定时器中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3
void Timer2_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<0; //TIM2时钟使能
TIM2->ARR=arr; //设定计数器自动重装值//刚好1ms
TIM2->PSC=psc; //预分频器7200,得到10Khz的计数时钟
//这两个东东要同时设置才可以使用中断
TIM2->DIER|=1<<0; //允许更新中断
TIM2->CR1|=0x01; //使能定时器3
MY_NVIC_Init(1,3,TIM2_IRQChannel,2); //抢占1,子优先级3,组2
}
中断函数
#include "sys.h"
//设置向量表偏移地址
//NVIC_VectTab:基址
//Offset:偏移量
//CHECK OK
//091207
void MY_NVIC_SetVectorTable(u32 NVIC_VectTab, u32 Offset)
{
//检查参数合法性
assert_param(IS_NVIC_VECTTAB(NVIC_VectTab));
assert_param(IS_NVIC_OFFSET(Offset));
SCB->VTOR = NVIC_VectTab|(Offset & (u32)0x1FFFFF80); //设置NVIC的向量表偏移寄存器
//用于标识向量表是在CODE区还是在RAM区
}
//设置NVIC分组
//NVIC_Group:NVIC分组 0~4 总共5组
//CHECK OK
//091209
void MY_NVIC_PriorityGroupConfig(u8 NVIC_Group)
{
u32 temp,temp1;
temp1=(~NVIC_Group)&0x07; //取后三位
temp1<<=8;
temp=SCB->AIRCR; //读取先前的设置
temp&=0X0000F8FF; //清空先前分组
temp|=0X05FA0000; //写入钥匙
temp|=temp1;
SCB->AIRCR=temp; //设置分组
}
//设置NVIC
//NVIC_PreemptionPriority:抢占优先级
//NVIC_SubPriority :响应优先级
//NVIC_Channel :中断编号
//NVIC_Group :中断分组 0~4
//注意优先级不能超过设定的组的范围!否则会有意想不到的错误
//组划分:
//组0:0位抢占优先级,4位响应优先级
//组1:1位抢占优先级,3位响应优先级
//组2:2位抢占优先级,2位响应优先级
//组3:3位抢占优先级,1位响应优先级
//组4:4位抢占优先级,0位响应优先级
//NVIC_SubPriority和NVIC_PreemptionPriority的原则是,数值越小,越优先
//CHECK OK
//100329
void MY_NVIC_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group)
{
u32 temp;
u8 IPRADDR=NVIC_Channel/4; //每组只能存4个,得到组地址
u8 IPROFFSET=NVIC_Channel%4; //在组内的偏移
IPROFFSET=IPROFFSET*8+4; //得到偏移的确切位置
MY_NVIC_PriorityGroupConfig(NVIC_Group); //设置分组
temp=NVIC_PreemptionPriority<<(4-NVIC_Group);
temp|=NVIC_SubPriority&(0x0f>>NVIC_Group);
temp&=0xf; //取低四位
if(NVIC_Channel<32)NVIC->ISER[0]|=1<
else NVIC->ISER[1]|=1<<(NVIC_Channel-32);
NVIC->IPR[IPRADDR]|=temp<
}
//外部中断配置函数
//只针对GPIOA~G;不包括PVD,RTC和USB唤醒这三个
//参数:GPIOx:0~6,代表GPIOA~G;BITx:需要使能的位;TRIM:触发模式,1,下升沿;2,上降沿;3,任意电平触发
//该函数一次只能配置1个IO口,多个IO口,需多次调用
//该函数会自动开启对应中断,以及屏蔽线
//待测试...
void Ex_NVIC_Config(u8 GPIOx,u8 BITx,u8 TRIM)
{
u8 EXTADDR;
u8 EXTOFFSET;
EXTADDR=BITx/4; //得到中断寄存器组的编号
EXTOFFSET=(BITx%4)*4;
RCC->APB2ENR|=0x01; //使能io复用时钟
AFIO->EXTICR[EXTADDR]&=~(0x000F<
AFIO->EXTICR[EXTADDR]|=GPIOx<
//自动设置
EXTI->IMR|=1<
if(TRIM&0x01)EXTI->FTSR|=1<
if(TRIM&0x02)EXTI->RTSR|=1<
}
//不能在这里执行所有外设复位!否则至少引起串口不工作.
//把所有时钟寄存器复位
//CHECK OK
//091209
void MYRCC_DeInit(void)
{
RCC->APB1RSTR = 0x00000000;//复位结束
RCC->APB2RSTR = 0x00000000;
RCC->AHBENR = 0x00000014; //睡眠模式闪存和SRAM时钟使能.其他关闭.
RCC->APB2ENR = 0x00000000; //外设时钟关闭.
RCC->APB1ENR = 0x00000000;
RCC->CR |= 0x00000001; //使能内部高速时钟HSION
RCC->CFGR &= 0xF8FF0000; //复位SW[1:0],HPRE[3:0],PPRE1[2:0],PPRE2[2:0],ADCPRE[1:0],MCO[2:0]
RCC->CR &= 0xFEF6FFFF; //复位HSEON,CSSON,PLLON
RCC->CR &= 0xFFFBFFFF; //复位HSEBYP
RCC->CFGR &= 0xFF80FFFF; //复位PLLSRC, PLLXTPRE, PLLMUL[3:0] and USBPRE
RCC->CIR = 0x00000000; //关闭所有中断
//配置向量表
#ifdef VECT_TAB_RAM
MY_NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
MY_NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
//CHECK OK
//091209
__asm void WFI_SET(void)
{
WFI;
}
//进入待机模式
//check ok
//091202
void Sys_Standby(void)
{
SCB->SCR|=1<<2; //使能SLEEPDEEP位 (SYS->CTRL)
RCC->APB1ENR|=1<<28; //使能电源时钟
PWR->CSR|=1<<8; //设置WKUP用于唤醒
PWR->CR|=1<<2; //清除Wake-up 标志
PWR->CR|=1<<1; //PDDS置位
WFI_SET(); //执行WFI指令
}
//系统软复位
//CHECK OK
//091209
void Sys_Soft_Reset(void)
{
SCB->AIRCR =0X05FA0000|(u32)0x04;
}
//JTAG模式设置,用于设置JTAG的模式
//mode:jtag,swd模式设置;00,全使能;01,使能SWD;10,全关闭;
//CHECK OK
//100818
void JTAG_Set(u8 mode)
{
u32 temp;
temp=mode;
temp<<=25;
RCC->APB2ENR|=1<<0; //开启辅助时钟
AFIO->MAPR&=0XF8FFFFFF; //清除MAPR的[26:24]
AFIO->MAPR|=temp; //设置jtag模式
}
//系统时钟初始化函数
//pll:选择的倍频数,从2开始,最大值为16
//CHECK OK
//091209
void Stm32_Clock_Init(u8 PLL)
{
unsigned char temp=0;
MYRCC_DeInit(); //复位并配置向量表
RCC->CR|=0x00010000; //外部高速时钟使能HSEON
while(!(RCC->CR>>17)); //等待外部时钟就绪
RCC->CFGR=0X00000400; //APB1=DIV2;APB2=DIV1;AHB=DIV1;
PLL-=2;//抵消2个单位
RCC->CFGR|=PLL<<18; //设置PLL值 2~16
RCC->CFGR|=1<<16; //PLLSRC ON
FLASH->ACR|=0x32; //FLASH 2个延时周期
RCC->CR|=0x01000000; //PLLON
while(!(RCC->CR>>25)); //等待PLL锁定
RCC->CFGR|=0x00000002; //PLL作为系统时钟
while(temp!=0x02) //等待PLL作为系统时钟设置成功
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
}
延时函数
#include
#include
#include "delay.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
//初始化延迟函数
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init(u8 SYSCLK)
{
SysTick->CTRL&=0xfffffffb; //bit2清空,选择外部时钟 HCLK/8
fac_us=SYSCLK/8;
fac_ms=(u16)fac_us*1000;
}
//延时nms
//注意nms的范围,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
接线说明:
电机驱动线:
1、 开发板 PA2 接小车底盘 M6 2、 开发板 PA3 接小车底盘 M5
3、 开发板 PA4 接小车底盘 M4 4、 开发板 PA5 接小车底盘 M3
5、 开发板 PA6 接小车底盘 M2 6、 开发板 PA7 接小车底盘 M1
超声波模块接线:
1、超声波模块 VCC 接开发板 5V 2、超声波模块 GND 接开发板 GND
3、超声波模块 Trig 接开发板 PB1 4、超声波模块 Echo 接开发板 PB0
舵机接线:
将舵机线接到小车底盘的舵机接口上(注意方向, 舵机棕线是 GND,
红线是 VCC, 橙线是信号线。 它们分别对应小车底盘舵机接口上的
GND,5V 和 S)。 另外, 舵机的信号线需要一条单独的杜邦线连接到
开发板的 PA0。
电源线:
1、 开发板 5V 接小车底盘 5V 2、 开发板 GND 接小车底盘 GND
红外避障信号线:
1、 开发板 PA13 接小车底盘 H3 2、 开发板 PA14 接小车底盘 H4

 举报
举报




