1、电路调试
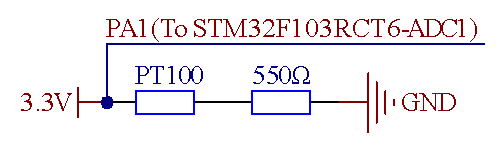
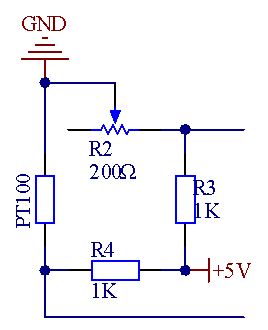
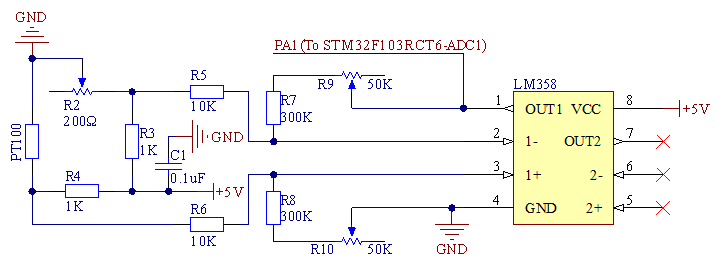
在设计电桥中,一开始是把 5 V 5V 5V接在PT100与精密电阻间,把GND接在两个 1 K 1K 1K中间,模拟软件测试没有问题,但实际电路中会出现问题,LM358的2号引脚和3号引脚不能承受过大的电压,最终导致LM358的输出为爆输出状态(标准温度下超过 3.3 V 3.3V 3.3V),但在LM358的芯片手册上提到这两个引脚所能接受的电压远远不止这么少,百思不得其解。
所以在设计中将GND接在PT100与精密电阻间,把 5 V 5V 5V接在两个 1 K 1K 1K中间,让 1 K 1K 1K去分掉电压,模拟软件测试也是没有问题,最终LM358的2号引脚和3号引脚所承受的电压降到了 0.5 V 0.5V 0.5V以下,输出也和模拟差不多,电路调试成功。
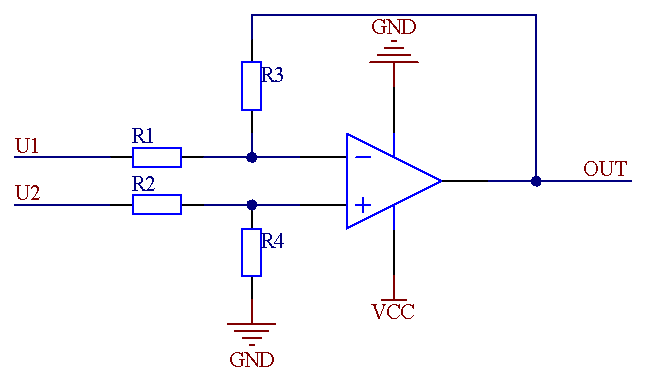
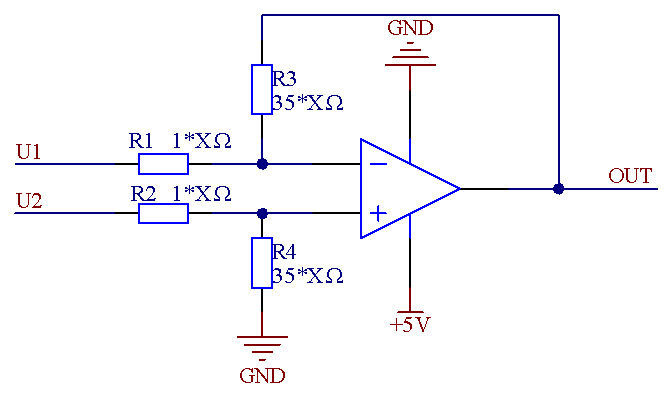
2、放大倍数调试
1、电路调试
在设计电桥中,一开始是把 5 V 5V 5V接在PT100与精密电阻间,把GND接在两个 1 K 1K 1K中间,模拟软件测试没有问题,但实际电路中会出现问题,LM358的2号引脚和3号引脚不能承受过大的电压,最终导致LM358的输出为爆输出状态(标准温度下超过 3.3 V 3.3V 3.3V),但在LM358的芯片手册上提到这两个引脚所能接受的电压远远不止这么少,百思不得其解。
所以在设计中将GND接在PT100与精密电阻间,把 5 V 5V 5V接在两个 1 K 1K 1K中间,让 1 K 1K 1K去分掉电压,模拟软件测试也是没有问题,最终LM358的2号引脚和3号引脚所承受的电压降到了 0.5 V 0.5V 0.5V以下,输出也和模拟差不多,电路调试成功。
2、放大倍数调试



 举报
举报