1.编码器概述
这里对此不再详细说明,本博文重在如何使用编码器,有兴趣的同学可以去网上了解,或者参考一下博文。
旋转编码器工作原理
2.增量式编码器控制思路
 图2-1 编码器实物图
图2-1 编码器实物图
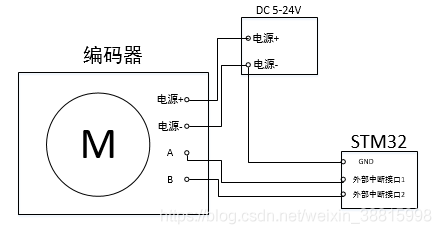 图2-2 编码器与MCU接线图
我们首先需要清楚编码器输出什么信号。
图2-2 编码器与MCU接线图
我们首先需要清楚编码器输出什么信号。
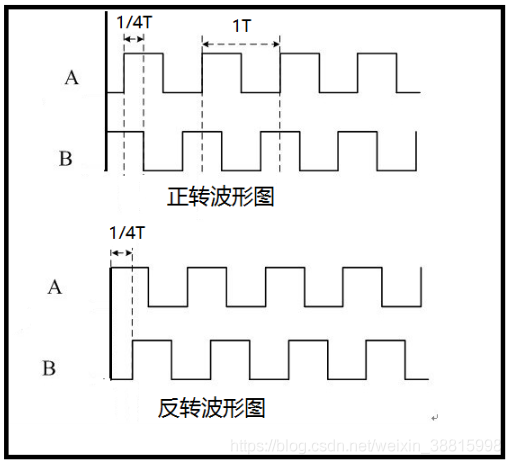 图2-3 编码器输出信号波形图
AB两相同时输出方波,并且相位相差90°,我们可以通过判断AB两相的电平跳变顺序来判断正反转,同时我们也可以通过计算任意一相的电平跳变次数来确定转动速度。
3.增量式编码器测速算法实现
注意,本博文仅仅是对增量式编码器最简单的应用,仅仅是利用M法去测速,最终的结果是得到500ms内触发的脉冲数,具体的速度转换方式会因为编码器的不同而不同,同时,需要测量正反转速度的算法也仅仅是使用多一个外部中断,具体的实现同学们可以自行设计。
图2-3 编码器输出信号波形图
AB两相同时输出方波,并且相位相差90°,我们可以通过判断AB两相的电平跳变顺序来判断正反转,同时我们也可以通过计算任意一相的电平跳变次数来确定转动速度。
3.增量式编码器测速算法实现
注意,本博文仅仅是对增量式编码器最简单的应用,仅仅是利用M法去测速,最终的结果是得到500ms内触发的脉冲数,具体的速度转换方式会因为编码器的不同而不同,同时,需要测量正反转速度的算法也仅仅是使用多一个外部中断,具体的实现同学们可以自行设计。
//author:ora
//email:1301912993@qq.com
#include "ROTARYENCODER.h"
#include "usart.h"
#define SAMPLE_CYCLE 500 //ms
/*
*@brief:编码器初始化,包括外部中断初始化、定时器update中断初始化
*@param:none
*@retval:none
*/
void rotaryEncoder_init(void)
{
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
int prescaler = 8400 - 1;
int period = SAMPLE_CYCLE * 10;
/****************************************EXTI8****************************/
//1.使能时钟 --> EXIT8 --> PF8
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
//2.中断映射线
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOF, EXTI_PinSource8);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
//GPIO_InitStruct.GPIO_OType = ;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed = GPIO_High_Speed;
GPIO_Init(GPIOF, &GPIO_InitStruct);
//4.初始化外部中断
EXTI_InitStruct.EXTI_Line = EXTI_Line8;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStruct);
//5.配置中断优先级
NVIC_InitStruct.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
/********************************************TIM3*****************************/
//1.使能时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//2.定时器初始化
TIM_TimeBaseInitStructure.TIM_Prescaler = prescaler;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = period;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//3.配置中断优先级
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStruct);
//4.允许定时器更新中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
//5.使能TIM
TIM_Cmd(TIM3, ENABLE);
}
extern u32 counter;
/*
*@brief:外部中断函数,counter加一
*@param:none
*@retval:none
*/
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line8) != RESET)
{
counter ++;
//printf("%dn",counter);
EXTI_ClearITPendingBit(EXTI_Line8);
}
}
/*
*@brief:TIM3中断函数,打印counter,置零counter
*@param:none
*@retval:none
*/
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
printf("counter:%d, ", counter);
counter = 0;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
}
4.知识补充
M/T测速实现
5.源代码下载
https://github.com/oraSC/STM32-course/tree/master/%E7%BC%96%E7%A0%81%E5%99%A8/rotaryEncoder_speedMeasure
1.编码器概述
这里对此不再详细说明,本博文重在如何使用编码器,有兴趣的同学可以去网上了解,或者参考一下博文。
旋转编码器工作原理
2.增量式编码器控制思路
图2-1 编码器实物图
图2-2 编码器与MCU接线图
我们首先需要清楚编码器输出什么信号。
图2-3 编码器输出信号波形图
AB两相同时输出方波,并且相位相差90°,我们可以通过判断AB两相的电平跳变顺序来判断正反转,同时我们也可以通过计算任意一相的电平跳变次数来确定转动速度。
3.增量式编码器测速算法实现
注意,本博文仅仅是对增量式编码器最简单的应用,仅仅是利用M法去测速,最终的结果是得到500ms内触发的脉冲数,具体的速度转换方式会因为编码器的不同而不同,同时,需要测量正反转速度的算法也仅仅是使用多一个外部中断,具体的实现同学们可以自行设计。
//author:ora
//email:1301912993@qq.com
#include "ROTARYENCODER.h"
#include "usart.h"
#define SAMPLE_CYCLE 500 //ms
/*
*@brief:编码器初始化,包括外部中断初始化、定时器update中断初始化
*@param:none
*@retval:none
*/
void rotaryEncoder_init(void)
{
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
int prescaler = 8400 - 1;
int period = SAMPLE_CYCLE * 10;
/****************************************EXTI8****************************/
//1.使能时钟 --> EXIT8 --> PF8
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
//2.中断映射线
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOF, EXTI_PinSource8);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
//GPIO_InitStruct.GPIO_OType = ;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed = GPIO_High_Speed;
GPIO_Init(GPIOF, &GPIO_InitStruct);
//4.初始化外部中断
EXTI_InitStruct.EXTI_Line = EXTI_Line8;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStruct);
//5.配置中断优先级
NVIC_InitStruct.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
/********************************************TIM3*****************************/
//1.使能时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//2.定时器初始化
TIM_TimeBaseInitStructure.TIM_Prescaler = prescaler;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = period;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//3.配置中断优先级
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStruct);
//4.允许定时器更新中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
//5.使能TIM
TIM_Cmd(TIM3, ENABLE);
}
extern u32 counter;
/*
*@brief:外部中断函数,counter加一
*@param:none
*@retval:none
*/
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line8) != RESET)
{
counter ++;
//printf("%dn",counter);
EXTI_ClearITPendingBit(EXTI_Line8);
}
}
/*
*@brief:TIM3中断函数,打印counter,置零counter
*@param:none
*@retval:none
*/
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
printf("counter:%d, ", counter);
counter = 0;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
}
4.知识补充
M/T测速实现
5.源代码下载
https://github.com/oraSC/STM32-course/tree/master/%E7%BC%96%E7%A0%81%E5%99%A8/rotaryEncoder_speedMeasure

 举报
举报




