
| 铜柱、铁丝、胶枪等基础材料和工具 | ||
| 自行车车架 | 1 | 自己做车架是很麻烦的,我直接买的车架,淘宝上搜“自行车 DIY 拼装”能搜到很多 |
| 舵机 | 1 | 转向用的,对于我用的 1:6 的车架,普通舵机有点大,我用的是 9g 舵机 |
| N20电机 | 1 | 选扭力大一点的,这样转速会比较稳定 |
| 皮带轮和皮带 | 如上面的图片,我是用皮带来传输动力的 |
| 电池、电池盒 | ||
| 洞洞板 | ||
| lm1117-3.3 | 降压芯片给控制系统供电 | |
| stm32f103c8t6核心板 | 1 | |
| gy521模块 | 1 | 加速度传感器 + 陀螺仪 |
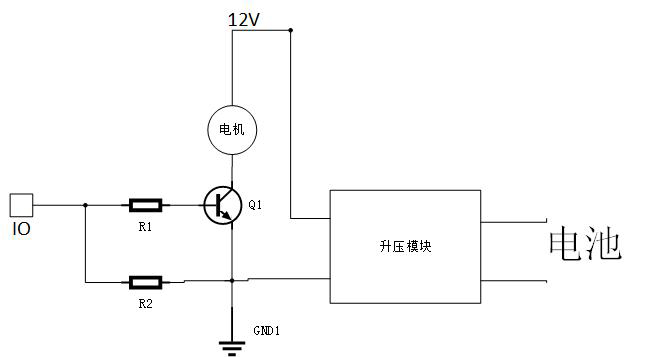
| 升压模块 | 1 | 升到12v给电机供电,根据电机特性选择是否使用升压模块 |
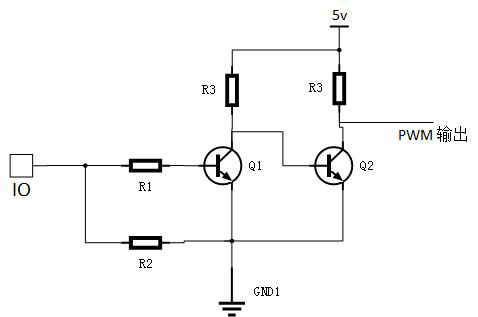
| 8050三极管 | 2 | 驱动电机,由于自行车不需要反转,所以不需要使用电机驱动芯片,用三极管就能方便地实现。我用了两个三极管并联提高功率。 |
| 自锁开关 | 1 | 整个系统开关 |
| led指示灯 | 1 | 配合1k限流电阻 |
| 蓝牙模块 | 1 | 可选,如果想要遥控的话就使用蓝牙 |
| PA9 | 下载TXD |
| PA10 | 下载RXD |
| 3.3v | ||
| GND | ||
| PB0 | GY521 I2C SCL | |
| PB1 | GY521 I2C SDA | 用的是IO,模拟IIC |
| i2c | i2c/i2c.c, include/i2c.h | IO 模拟i2c驱动,提供i2c基础操作 |
| gy521 | gy521/gy521.c, include/gy521.h | gy521模块驱动,基于i2c驱动,提供加速度和角速度的读取接口 |
| motor | motor/motor.c, include/motor.h | 电机驱动,提供占空比控制接口 |
| angle | angle/angle.c, include/angle.h | 舵机驱动,提供角度控制接口 |
| 指令接收 | 串口接收到的数据会传给main/control.c,该文件分析串口数据,解释成相应的操作。主要是PID参数调节。 |

 举报
举报
更多回帖


