深圳市航顺芯片技术研发有限公司
登录
直播中
陈艳
7年用户
959经验值
私信
关注
[问答]
基于STM32F103C8T6和TB6612FNG的平衡小车是如何制作的
开启该帖子的消息推送
TB6612FNG
平衡小车
平衡小车的硬件是由哪些部分组成的?
基于
STM32
F103C8T6和TB6612FNG的平衡小车是如何制作的?
回帖
(1)
张敏
2021-11-4 09:32:11
之后的一系列文章我将介绍我玩平衡小车的过程以及遇到的一些问题,将这些内容记录下来分享给大家,也让大家少走一些弯路。接下来我将从硬件框架选择、软件编程、PID算法、PID调参、蓝牙遥控这五个部分向大家讲解平衡小车的制作过程。
本系列平衡小车文章适合于刚刚学习STM32但感觉没有玩透,想找个项目练练手,那么平衡小车绝对适合你。同时也适合于对于平衡小车感兴趣但编程和硬件基础较差,没有关系,跟随小政将让你轻松学会制作一个属于自己的平衡小车。
第一篇文章我会首先介绍平衡小车的硬件组成,对硬件原理图进行详解。
一、硬件结构
1. 主控板:主控芯片(STM32F103C8T6)+电机驱动芯片(TB6612FNG),利用AD20画的PCB并进行打板。
2. 小车框架:平衡车底盘、电机、轮子(某宝有售)
3. 电池:狮子航模电池2200mAh11.1V35C,T母头
4. DC-DC降压模块:MP1584EN,3A可调降压稳压电源模块
5. 陀螺仪:MPU6050,检测倾斜角度
6. OLED:4线I2C OLED显示屏
7. 超声波模块:HC-SR04
8. 蓝牙:HC-05
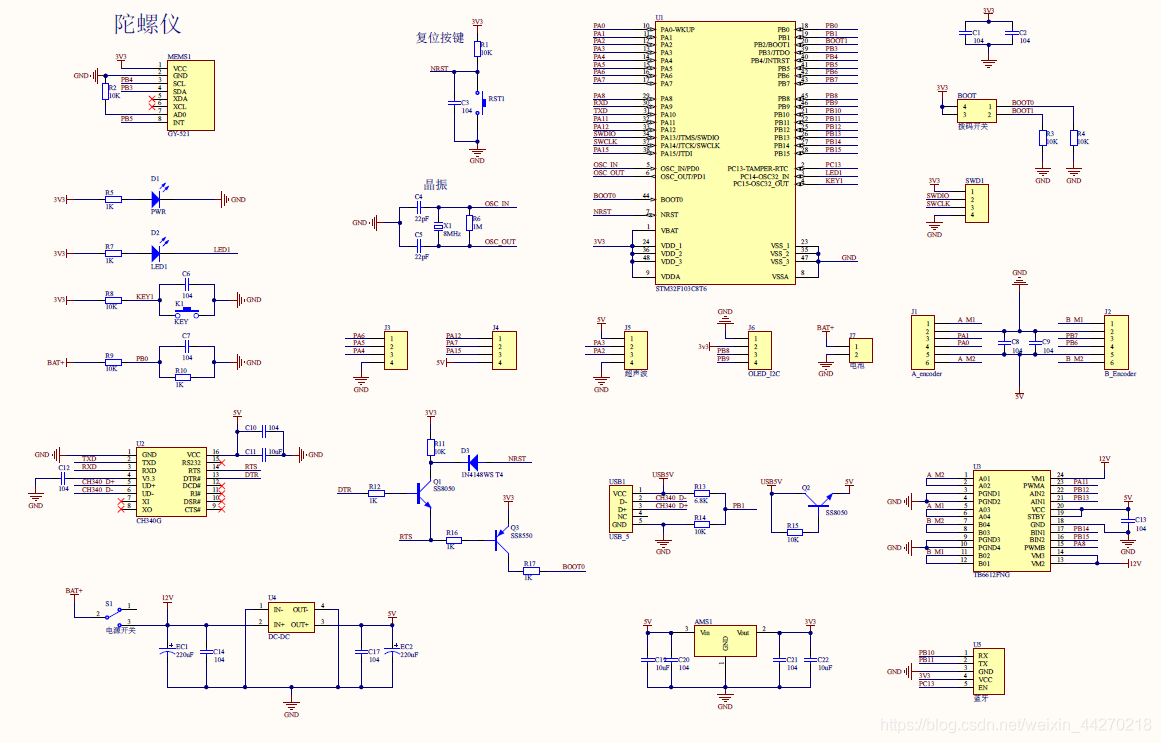
二、硬件原理图
硬件原理图我利用Altium Designer 20画的,并进行了PCB打板。想要获取原理图的小伙伴可以去我的百度网盘下载。
图1 平衡小车硬件原理图
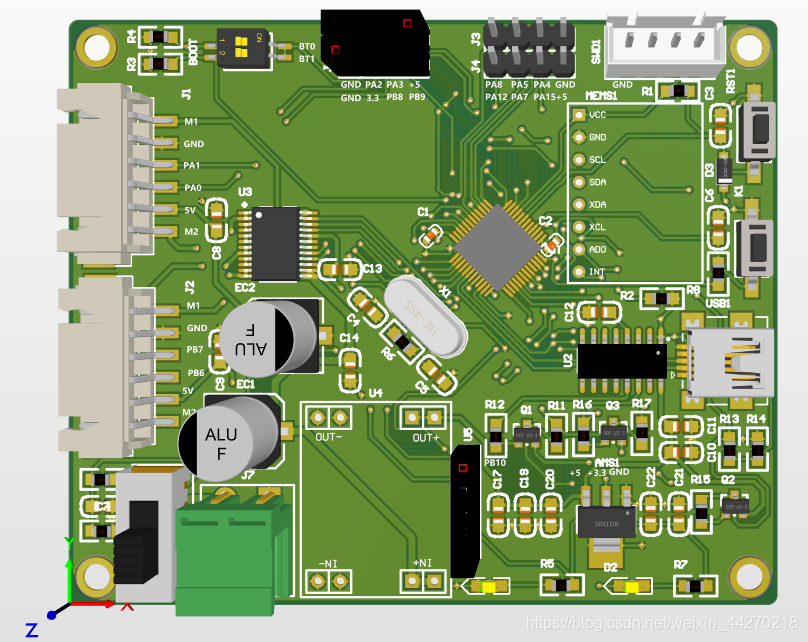
图2 平衡小车3D视图PCB
三、硬件框架讲解
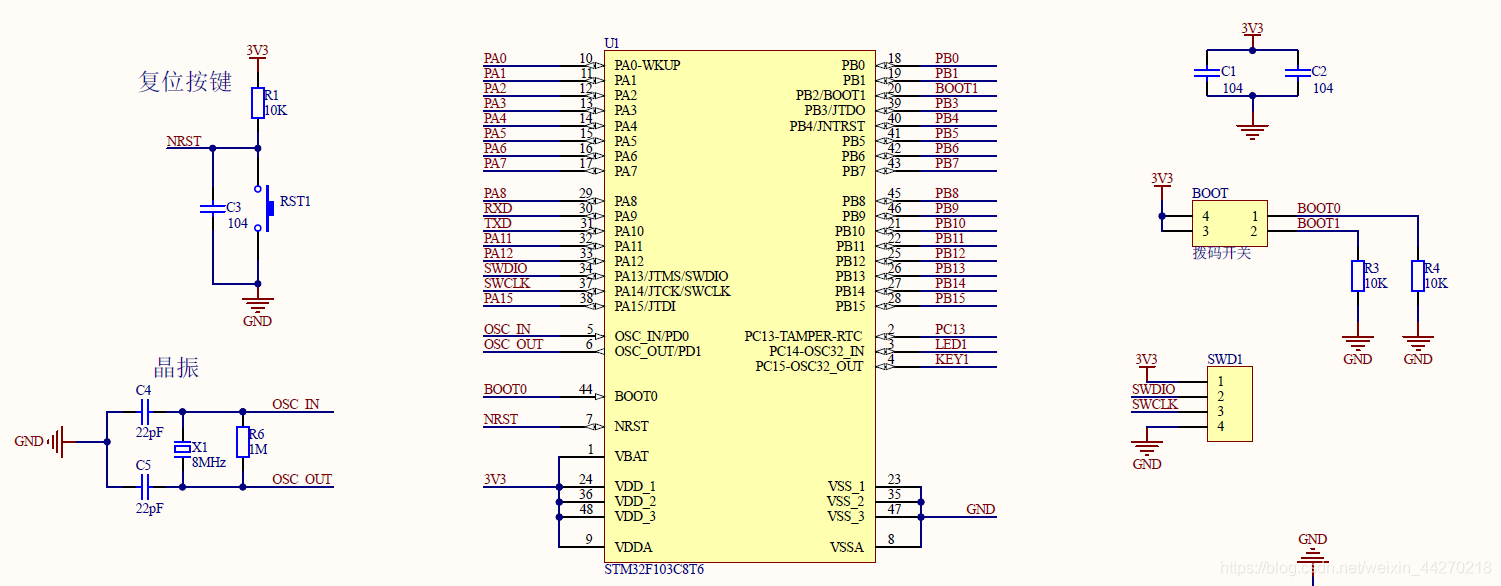
(1)STM32F103C8T6
主控芯片及周围电路结构如下:
1)STM32F103C8T6(48脚芯片)
2)8M晶振(STM32内部倍频至72MHz,产生供系统正常工作的稳定的脉冲信号),
3)复位电路(RST)
4)启动模式选择电路(BOOT0和BOOT1)
5)去耦电容(3.3V与GND之间加几个104电容)
6)烧写电路(SW)
图3 主控芯片及周围电路 (2)电源电路
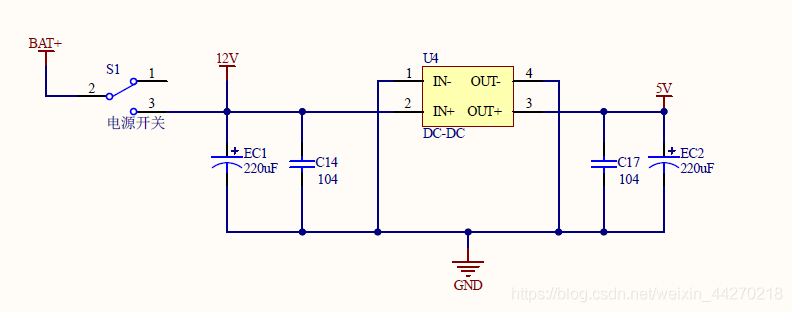
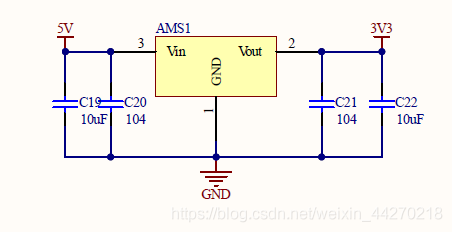
电源采用11.1V锂电池供电,通过DC-DC降压模块获取5V电压,在通过AMS1117降至3.3V。图中电解电容主要目的是滤低频纹波,瓷片电容主要目的是抑制高频噪声,需靠近管脚。
图4 DC-DC降压模块
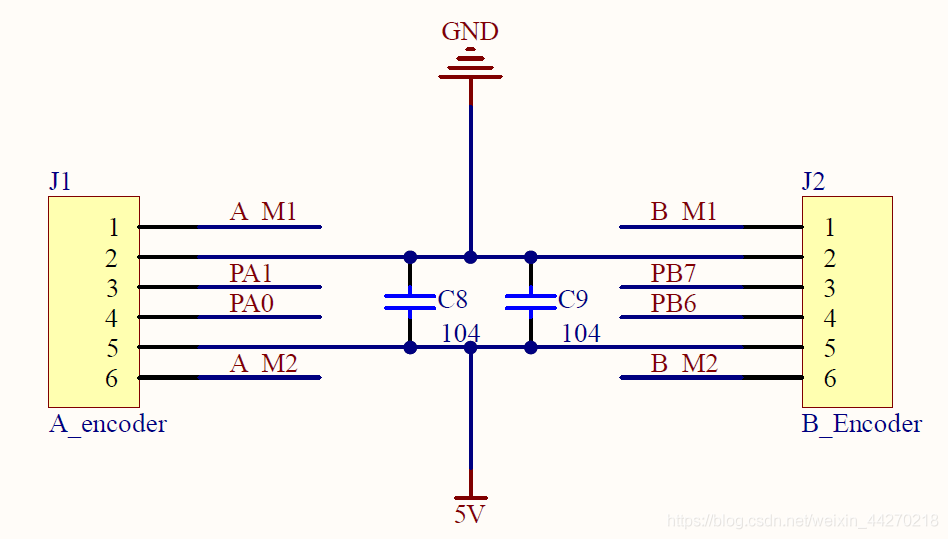
图5 AMS1117转3.3V (3)编码器
作用:实时检测电机速度
编码器1——PA0/PA1——TIM2
编码器2——PB6/PB7——TIM4
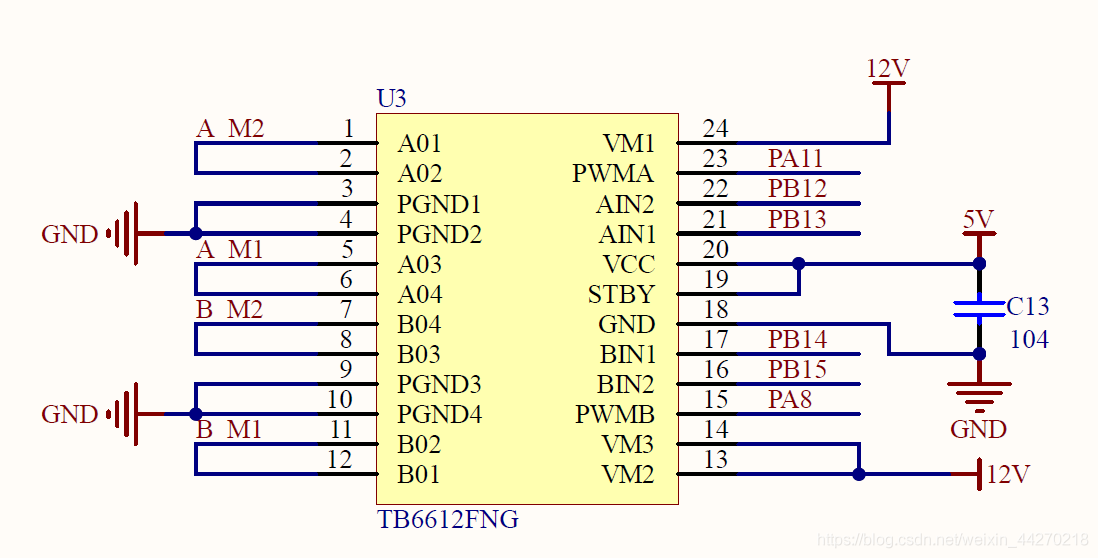
图6 编码器引脚(TIM2,TIM4) (4)电机驱动芯片TB6612FNG
作用:驱动电机正常运行
PWM1——PA8
PWM2——PA11
电机1——PB12/PB13
电机2——PB14/PB15
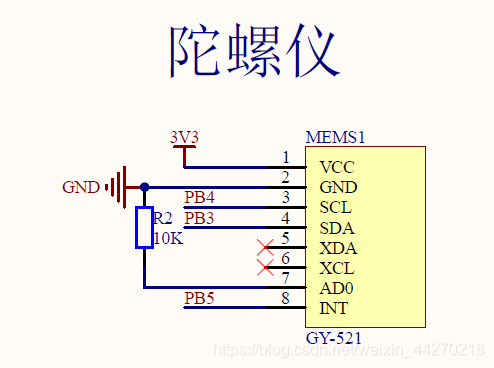
图7 TB6612FNG(TIM3) (5)陀螺仪MPU6050
作用:检测倾斜角
MPU6050中断引脚——PB5
MPU6050所用I2C——PB3/PB4
图8 陀螺仪MPU6050(I2C)
之后的一系列文章我将介绍我玩平衡小车的过程以及遇到的一些问题,将这些内容记录下来分享给大家,也让大家少走一些弯路。接下来我将从硬件框架选择、软件编程、PID算法、PID调参、蓝牙遥控这五个部分向大家讲解平衡小车的制作过程。
本系列平衡小车文章适合于刚刚学习STM32但感觉没有玩透,想找个项目练练手,那么平衡小车绝对适合你。同时也适合于对于平衡小车感兴趣但编程和硬件基础较差,没有关系,跟随小政将让你轻松学会制作一个属于自己的平衡小车。
第一篇文章我会首先介绍平衡小车的硬件组成,对硬件原理图进行详解。
一、硬件结构
1. 主控板:主控芯片(STM32F103C8T6)+电机驱动芯片(TB6612FNG),利用AD20画的PCB并进行打板。
2. 小车框架:平衡车底盘、电机、轮子(某宝有售)
3. 电池:狮子航模电池2200mAh11.1V35C,T母头
4. DC-DC降压模块:MP1584EN,3A可调降压稳压电源模块
5. 陀螺仪:MPU6050,检测倾斜角度
6. OLED:4线I2C OLED显示屏
7. 超声波模块:HC-SR04
8. 蓝牙:HC-05
二、硬件原理图
硬件原理图我利用Altium Designer 20画的,并进行了PCB打板。想要获取原理图的小伙伴可以去我的百度网盘下载。
图1 平衡小车硬件原理图
图2 平衡小车3D视图PCB
三、硬件框架讲解
(1)STM32F103C8T6
主控芯片及周围电路结构如下:
1)STM32F103C8T6(48脚芯片)
2)8M晶振(STM32内部倍频至72MHz,产生供系统正常工作的稳定的脉冲信号),
3)复位电路(RST)
4)启动模式选择电路(BOOT0和BOOT1)
5)去耦电容(3.3V与GND之间加几个104电容)
6)烧写电路(SW)
图3 主控芯片及周围电路 (2)电源电路
电源采用11.1V锂电池供电,通过DC-DC降压模块获取5V电压,在通过AMS1117降至3.3V。图中电解电容主要目的是滤低频纹波,瓷片电容主要目的是抑制高频噪声,需靠近管脚。
图4 DC-DC降压模块
图5 AMS1117转3.3V (3)编码器
作用:实时检测电机速度
编码器1——PA0/PA1——TIM2
编码器2——PB6/PB7——TIM4
图6 编码器引脚(TIM2,TIM4) (4)电机驱动芯片TB6612FNG
作用:驱动电机正常运行
PWM1——PA8
PWM2——PA11
电机1——PB12/PB13
电机2——PB14/PB15
图7 TB6612FNG(TIM3) (5)陀螺仪MPU6050
作用:检测倾斜角
MPU6050中断引脚——PB5
MPU6050所用I2C——PB3/PB4
图8 陀螺仪MPU6050(I2C)
举报
更多回帖
rotate(-90deg);
回复
相关问答
TB6612FNG
平衡小车
如何利用GM25-370和B
6612FNG
实现
平衡
小车
的
制作
?
2021-10-20
1943
怎么用MSP430
F
5529控制
TB6612FNG
电机驱动模块循迹?
2019-08-08
3149
请问有主控芯片是
STM32F103C8T6
的两轮
平衡
小车
资料吗
2019-02-24
3212
如何利用
tb6612fng
来驱动
stm32
制作
的巡线
小车
?
2021-10-15
1961
如何利用
STM32F103C8T6
完成循迹避障
小车
的
制作
?
2021-10-08
2028
如何实现
TB6612FNG
与直流电机的控制?
2021-10-18
1709
TB6612FNG
是什么?有哪些主要参数?
2021-06-30
1264
求助,myRIO怎么使用
TB6612FNG
电机驱动模块驱动直流电机?
2016-03-24
5515
基于
STM32F103C8T6
的巡线
小车
制作
过程以及出现的问题参考
2022-01-20
2613
STM32f103c8t6
的引脚有哪些
2021-10-26
4425
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



