
![]()
![]()
AT89C51单片机
请问89c51
单片机如何控制两个步进电机正反转加减速?
回帖(1)

2021-10-27 14:57:28
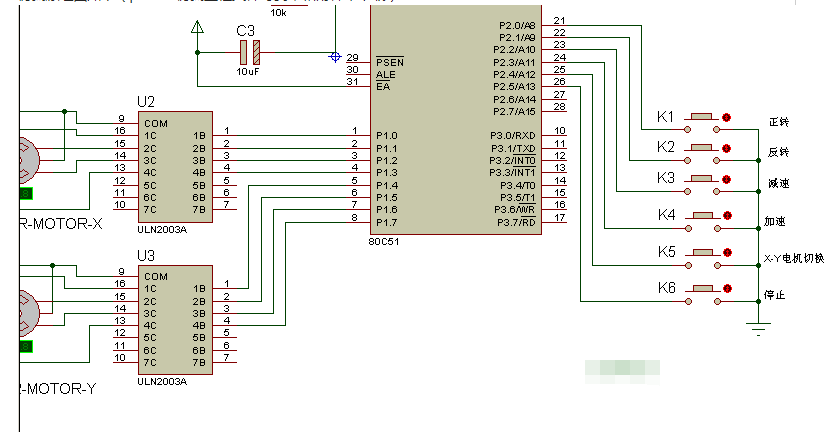
仿真原理图如下(proteus仿真工程文件可到本帖附件中下载)
- /*******************************************************************************
- * 实 验 名: 步进电机实验
- * 使用的IO: 电机用P1口,键盘使用P2.0、P2.1、P2.2、P2.3、P2.4、P2.5
- * 按键功能:K1;正转 K2;反转 K3;低速转动 K4;高速转动 K5:电机切换 K6;停止
- * 实验效果: 按下K1键,顺时针转,按下K2键,逆时针转,按下K3键,低速,按下K4键,高速。
- 按下K5键,转动的电机停止,并切换到控制另一个电机
- 按下K6键,转动的电机停止,按下K1或K2时,刚才停止的电机继续转动
- *******************************************************************************/
- #include "reg52.h"
- //电机IO
- #define GPIO_MOTOR P1 //宏定义 对端口进行操作,定义电机接口为P1
- //***it F1 = P1^0;
- //***it F2 = P1^1;
- //***it F3 = P1^2;
- //***it F4 = P1^3;
- //***it F5 = P1^4;
- //***it F6 = P1^5;
- //***it F7 = P1^6;
- //***it F8 = P1^7; //另种操作,位操作,定义电机接口为P1.0~p1.7
- //按键IO
- ***it K1=P2^0; //正转
- ***it K2=P2^1; //反转
- ***it K3=P2^2; // 减速
- ***it K4=P2^3; // 加速
- ***it K5=P2^4; // 电机切换
- ***it K6=P2^5; // 停止
- unsigned char code FFW_X[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反转顺序
- unsigned char code FFZ_X[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正转顺序
- unsigned char code FFW_Y[8]={0x1f,0x3f,0x2f,0x6f,0x4f,0xcf,0x8f,0x9f}; //Y反转顺序
- unsigned char code FFZ_Y[8]={0x9f,0x8f,0xcf,0x4f,0x6f,0x2f,0x3f,0x1f}; //Y正转顺序
- unsigned char Direction,Speed,X_Y=0,stop=0; // Direction 转向标志位,Speed 延时函数的参数,通过改变它大小来控制电机转速
- //X_Y 电机的参数 X_Y=0为Y电机 X_Y=1为X电机
- void Delay(unsigned int t); //stop为控制电机停止的标志位,但它为1时,电机停止
- void Motor(); //电机旋转函数
- /*******************************************************************************
- * 函 数 名 : main
- * 函数功能 : 主函数
- * 输 入 : 无
- * 输 出 : 无
- *******************************************************************************/
- void main(void)
- {
- unsigned char i;
- Speed=30; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- while(1)
- {
- /********************检测按键K1是否按下***********************/
- if(K1==0) //检测按键K1是否按下
- {
- Delay(1); //消除抖动
- if(K1==0)
- {
- Direction=1; //Direction 转向标志位,为1时为正转
- stop=0; //按下K1时,对stop停止标志位清零,如果之前按下停止键,清零之后才能启动
- }
- while((i<200)&&(K1==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K2是否按下***********************/
- if(K2==0) //检测按键K2是否按下
- {
- Delay(1); //消除抖动
- if(K2==0)
- {
- Direction=2; //Direction 转向标志位,为2时为反转
- stop=0; //按下K1时,也对stop停止标志位清零,如果之前按下停止键,清零之后才能启动
- }
- while((i<200)&&(K2==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K3是否按下***********************/
- if(K3==0)//检测按键K3是否按下
- {
- Delay(1);//消除抖动
- if(K3==0)
- {
- Speed=60; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- //87行代码定义Speed=30;但按键K3按下后,Speed=60,这时转速就会降下来
- }
- while((i<200)&&(K3==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K3是否按下***********************/
- if(K4==0) //检测按键K4是否按下
- {
- Delay(1); //消除抖动
- if(K4==0)
- {
- Speed=20; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- //87行代码定义Speed=30;但按键K4按下后,Speed=20,这时转速就会降下来升上去
- }
- while((i<200)&&(K4==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- if(K5==0)//检测按键K1是否按下
- {
- Delay(1);//消除抖动
- if(K5==0)
- {
- Direction=0; //X_Y 电机的参数 X_Y=0为Y电机 X_Y=1为X电机
- if(X_Y==0) //当切换电机时,对Direction=0;对标志位清零,防止上个电机的转向影响本次所控电机
- X_Y=1;
- else
- X_Y=0;
- }
- while((i<200)&&(K5==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- if(K6==0)//检测按键K1是否按下
- {
- Delay(1);//消除抖动
- if(K6==0)
- {
- stop=1; //stop为控制电机停止的标志位,但它为1时,电机停止
- }
- while((i<200)&&(K6==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- Motor();
- }
- }
- /*******************************************************************************
- * 函 数 名: Motor
- * 函数功能: 电机旋转函数
- * 输 入: 无
- * 输 出: 无
- *******************************************************************************/
- void Motor()
- {
- unsigned char i;
- for(i=0;i<8;i++)
- {
- if(Direction==1&&X_Y==0&&stop==0) //正转&Y电机&电机没按下停止
- GPIO_MOTOR = FFW_Y&0xf0;//取数据,‘&’按位与
- if(Direction==2&&X_Y==0&&stop==0) //反转&Y电机&电机没按下停止
- GPIO_MOTOR = FFZ_Y&0xf0;
- if(Direction==1&&X_Y!=0&&stop==0) //正转&X电机&电机没按下停止
- GPIO_MOTOR = FFW_X&0x0F;//取数据
- if(Direction==2&&X_Y!=0&&stop==0) //反转&X电机&电机没按下停止
- GPIO_MOTOR = FFZ_X&0x0f;
- Delay(Speed); //调节转速
- }
- }
- /*******************************************************************************
- * 函 数 名 : Delay
- * 函数功能 : 延时
- * 输 入 : t
- * 输 出 : 无
- *******************************************************************************/
- void Delay(unsigned int t)
- {
- unsigned int k;
- while(t--)
- {
- for(k=0; k<80; k++)
- { }
- }
- }
仿真原理图如下(proteus仿真工程文件可到本帖附件中下载)
- /*******************************************************************************
- * 实 验 名: 步进电机实验
- * 使用的IO: 电机用P1口,键盘使用P2.0、P2.1、P2.2、P2.3、P2.4、P2.5
- * 按键功能:K1;正转 K2;反转 K3;低速转动 K4;高速转动 K5:电机切换 K6;停止
- * 实验效果: 按下K1键,顺时针转,按下K2键,逆时针转,按下K3键,低速,按下K4键,高速。
- 按下K5键,转动的电机停止,并切换到控制另一个电机
- 按下K6键,转动的电机停止,按下K1或K2时,刚才停止的电机继续转动
- *******************************************************************************/
- #include "reg52.h"
- //电机IO
- #define GPIO_MOTOR P1 //宏定义 对端口进行操作,定义电机接口为P1
- //***it F1 = P1^0;
- //***it F2 = P1^1;
- //***it F3 = P1^2;
- //***it F4 = P1^3;
- //***it F5 = P1^4;
- //***it F6 = P1^5;
- //***it F7 = P1^6;
- //***it F8 = P1^7; //另种操作,位操作,定义电机接口为P1.0~p1.7
- //按键IO
- ***it K1=P2^0; //正转
- ***it K2=P2^1; //反转
- ***it K3=P2^2; // 减速
- ***it K4=P2^3; // 加速
- ***it K5=P2^4; // 电机切换
- ***it K6=P2^5; // 停止
- unsigned char code FFW_X[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反转顺序
- unsigned char code FFZ_X[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正转顺序
- unsigned char code FFW_Y[8]={0x1f,0x3f,0x2f,0x6f,0x4f,0xcf,0x8f,0x9f}; //Y反转顺序
- unsigned char code FFZ_Y[8]={0x9f,0x8f,0xcf,0x4f,0x6f,0x2f,0x3f,0x1f}; //Y正转顺序
- unsigned char Direction,Speed,X_Y=0,stop=0; // Direction 转向标志位,Speed 延时函数的参数,通过改变它大小来控制电机转速
- //X_Y 电机的参数 X_Y=0为Y电机 X_Y=1为X电机
- void Delay(unsigned int t); //stop为控制电机停止的标志位,但它为1时,电机停止
- void Motor(); //电机旋转函数
- /*******************************************************************************
- * 函 数 名 : main
- * 函数功能 : 主函数
- * 输 入 : 无
- * 输 出 : 无
- *******************************************************************************/
- void main(void)
- {
- unsigned char i;
- Speed=30; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- while(1)
- {
- /********************检测按键K1是否按下***********************/
- if(K1==0) //检测按键K1是否按下
- {
- Delay(1); //消除抖动
- if(K1==0)
- {
- Direction=1; //Direction 转向标志位,为1时为正转
- stop=0; //按下K1时,对stop停止标志位清零,如果之前按下停止键,清零之后才能启动
- }
- while((i<200)&&(K1==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K2是否按下***********************/
- if(K2==0) //检测按键K2是否按下
- {
- Delay(1); //消除抖动
- if(K2==0)
- {
- Direction=2; //Direction 转向标志位,为2时为反转
- stop=0; //按下K1时,也对stop停止标志位清零,如果之前按下停止键,清零之后才能启动
- }
- while((i<200)&&(K2==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K3是否按下***********************/
- if(K3==0)//检测按键K3是否按下
- {
- Delay(1);//消除抖动
- if(K3==0)
- {
- Speed=60; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- //87行代码定义Speed=30;但按键K3按下后,Speed=60,这时转速就会降下来
- }
- while((i<200)&&(K3==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- /********************检测按键K3是否按下***********************/
- if(K4==0) //检测按键K4是否按下
- {
- Delay(1); //消除抖动
- if(K4==0)
- {
- Speed=20; //Speed 延时函数的参数,通过改变它大小来控制电机转速
- //87行代码定义Speed=30;但按键K4按下后,Speed=20,这时转速就会降下来升上去
- }
- while((i<200)&&(K4==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- if(K5==0)//检测按键K1是否按下
- {
- Delay(1);//消除抖动
- if(K5==0)
- {
- Direction=0; //X_Y 电机的参数 X_Y=0为Y电机 X_Y=1为X电机
- if(X_Y==0) //当切换电机时,对Direction=0;对标志位清零,防止上个电机的转向影响本次所控电机
- X_Y=1;
- else
- X_Y=0;
- }
- while((i<200)&&(K5==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- if(K6==0)//检测按键K1是否按下
- {
- Delay(1);//消除抖动
- if(K6==0)
- {
- stop=1; //stop为控制电机停止的标志位,但它为1时,电机停止
- }
- while((i<200)&&(K6==0))//检测按键是否松开
- {
- Delay(1);
- i++;
- }
- i=0;
- }
- Motor();
- }
- }
- /*******************************************************************************
- * 函 数 名: Motor
- * 函数功能: 电机旋转函数
- * 输 入: 无
- * 输 出: 无
- *******************************************************************************/
- void Motor()
- {
- unsigned char i;
- for(i=0;i<8;i++)
- {
- if(Direction==1&&X_Y==0&&stop==0) //正转&Y电机&电机没按下停止
- GPIO_MOTOR = FFW_Y&0xf0;//取数据,‘&’按位与
- if(Direction==2&&X_Y==0&&stop==0) //反转&Y电机&电机没按下停止
- GPIO_MOTOR = FFZ_Y&0xf0;
- if(Direction==1&&X_Y!=0&&stop==0) //正转&X电机&电机没按下停止
- GPIO_MOTOR = FFW_X&0x0F;//取数据
- if(Direction==2&&X_Y!=0&&stop==0) //反转&X电机&电机没按下停止
- GPIO_MOTOR = FFZ_X&0x0f;
- Delay(Speed); //调节转速
- }
- }
- /*******************************************************************************
- * 函 数 名 : Delay
- * 函数功能 : 延时
- * 输 入 : t
- * 输 出 : 无
- *******************************************************************************/
- void Delay(unsigned int t)
- {
- unsigned int k;
- while(t--)
- {
- for(k=0; k<80; k++)
- { }
- }
- }

 举报
举报
更多回帖



