接线方式
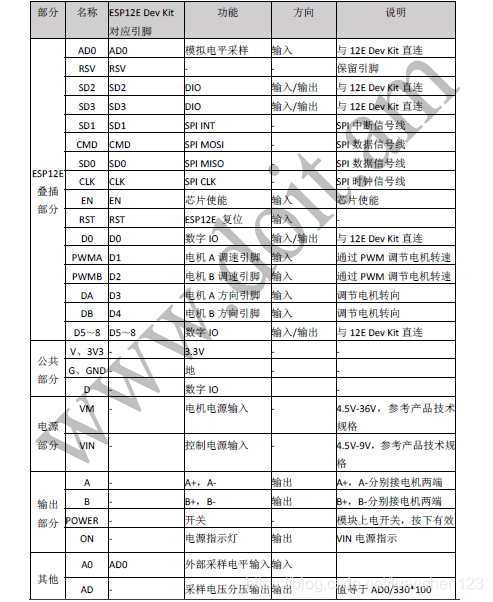
通过图片可以得知,A+、A-、B+、B-控制电机的方向和电机的转速,且对应的引脚为D1、D2、D3、D4。
所以电机连线分别为左电机正极接A+,负极接A-;右电机负极接B+,正极接B-
代码部分
//ESP8266 NodeMcu电机扩展板驱动两个直流TT马达实验
#include 《ESP8266WiFi.h》 // 本程序使用 ESP8266WiFi库
#include 《ESP8266WiFiMulti.h》 // ESP8266WiFiMulti库
#include 《ESP8266WebServer.h》 // ESP8266WebServer库
ESP8266WiFiMulti wifiMulti; // 建立ESP8266WiFiMulti对象,对象名称是 ‘wifiMulti’
ESP8266WebServer esp8266_server(80);// 建立网络服务器对象,该对象用于响应HTTP请求。监听端口(80)
void setup(void){
Serial.begin(9600); // 启动串口通讯
pinMode(D1,OUTPUT); //调节电机转速
pinMode(D2, OUTPUT); //调节电机B转速
pinMode(D3, OUTPUT); //调节电机A方向
pinMode(D4,OUTPUT); //调节电机B方向
wifiMulti.addAP(“your WiFi name”, “your paaword”); // 将需要连接的一系列WiFi ID和密码输入这里
wifiMulti.addAP(“ssid_from_AP_2”, “your_password_for_AP_2”); // ESP8266-NodeMCU再启动后会扫描当前网络
wifiMulti.addAP(“ssid_from_AP_3”, “your_password_for_AP_3”); // 环境查找是否有这里列出的WiFi ID。如果有
Serial.println(“Connecting 。..”); // 则尝试使用此处存储的密码进行连接。
int i = 0;
while (wifiMulti.run() != WL_CONNECTED) { // 此处的wifiMulti.run()是重点。通过wifiMulti.run(),NodeMCU将会在当前
delay(1000); // 环境中搜索addAP函数所存储的WiFi。如果搜到多个存储的WiFi那么NodeMCU
Serial.print(i++); Serial.print(‘ ’); // 将会连接信号最强的那一个WiFi信号。
} // 一旦连接WiFI成功,wifiMulti.run()将会返回“WL_CONNECTED”。这也是
// 此处while循环判断是否跳出循环的条件。
// WiFi连接成功后将通过串口监视器输出连接成功信息
Serial.println(‘n’);
Serial.print(“Connected to ”);
Serial.println(WiFi.SSID()); // 通过串口监视器输出连接的WiFi名称
Serial.print(“IP address:t”);
Serial.println(WiFi.localIP()); // 通过串口监视器输出ESP8266-NodeMCU的IP
esp8266_server.begin(); // 启动网站服务
esp8266_server.on(“/”, HTTP_GET, handleRoot); // 设置服务器根目录即‘/’的函数‘handleRoot’
esp8266_server.on(“/go”, HTTP_POST, handlego); // 设置服务器根目录即‘/’的函数‘handleRoot’
esp8266_server.on(“/back”, HTTP_POST, handleback); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/left”, HTTP_POST, handleleft); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/right”, HTTP_POST, handleright); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/stop”, HTTP_POST, handlestop); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.onNotFound(handleNotFound); // 设置处理404情况的函数‘handleNotFound’
Serial.println(“HTTP esp8266_server started”);// 告知用户ESP8266网络服务功能已经启动
}
void loop(void){
esp8266_server.handleClient(); // 检查http服务器访问
}
/*设置服务器根目录即‘/’的函数‘handleRoot’
该函数的作用是每当有客户端访问NodeMCU服务器根目录时,
NodeMCU都会向访问设备发送 HTTP 状态 200 (Ok) 这是send函数的第一个参数。
同时NodeMCU还会向浏览器发送HTML代码,以下示例中send函数中第三个参数,
也就是双引号中的内容就是NodeMCU发送的HTML代码。该代码可在网页中产生LED控制按钮。
当用户按下按钮时,浏览器将会向NodeMCU的/LED页面发送HTTP请求,请求方式为POST。
NodeMCU接收到此请求后将会执行handleLED函数内容*/
void handleRoot() {
esp8266_server.send(200, “text/html”, “《center》《h1》NodeMcu motor expansion board to control the motor《/h1》Through the following buttons, I can control two DC TT motors through the ESP8266 NodeMcu motor extension base《/p》《form action=”/go“ method=”POST“》《input type=”submit“ value=”forward“》《/form》《br》《form action=”/back“ method=”POST“》《input type=”submit“ value=”retreat“》《/form》《br》《form action=”/left“ method=”POST“》《input type=”submit“ value=”turn left“》《/form》《br》《form action=”/right“ method=”POST“》《input type=”submit“ value=”turn right“》《/form》《br》《form action=”/stop“ method=”POST“》《input type=”submit“ value=”break“》《/form》《/center》”);}
//处理前进控制请求的函数‘handlego’
void handlego() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, LOW);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理后退控制请求的函数‘handleback’
void handleback() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, HIGH);
digitalWrite(D4, HIGH);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理左转控制请求的函数‘handleleft’
void handleleft() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, HIGH);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理右转控制请求的函数‘handleright’
void handleright() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, LOW);
digitalWrite(D4, HIGH);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理停止控制请求的函数‘handlestop’
void handlestop() {
analogWrite(D1, 0);
analogWrite(D2, 0);
digitalWrite(D3, LOW);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
// 设置处理404情况的函数‘handleNotFound’
void handleNotFound(){
esp8266_server.send(404, “text/plain”, “404: Not found”); // 发送 HTTP 状态 404 (未找到页面) 并向浏览器发送文字 “404: Not found”
}
实验部分
在接线完毕和程序烧录完成之后,打开串口监视器,浏览器地址栏中写入IP地址,即可打开控制页面。
下一步实现
电机的调速是通过预先设定好的PWM值去调控,博主正构思网页中加入改变PWM值的按键,进行实时调速。
接线方式
通过图片可以得知,A+、A-、B+、B-控制电机的方向和电机的转速,且对应的引脚为D1、D2、D3、D4。
所以电机连线分别为左电机正极接A+,负极接A-;右电机负极接B+,正极接B-
代码部分
//ESP8266 NodeMcu电机扩展板驱动两个直流TT马达实验
#include 《ESP8266WiFi.h》 // 本程序使用 ESP8266WiFi库
#include 《ESP8266WiFiMulti.h》 // ESP8266WiFiMulti库
#include 《ESP8266WebServer.h》 // ESP8266WebServer库
ESP8266WiFiMulti wifiMulti; // 建立ESP8266WiFiMulti对象,对象名称是 ‘wifiMulti’
ESP8266WebServer esp8266_server(80);// 建立网络服务器对象,该对象用于响应HTTP请求。监听端口(80)
void setup(void){
Serial.begin(9600); // 启动串口通讯
pinMode(D1,OUTPUT); //调节电机转速
pinMode(D2, OUTPUT); //调节电机B转速
pinMode(D3, OUTPUT); //调节电机A方向
pinMode(D4,OUTPUT); //调节电机B方向
wifiMulti.addAP(“your WiFi name”, “your paaword”); // 将需要连接的一系列WiFi ID和密码输入这里
wifiMulti.addAP(“ssid_from_AP_2”, “your_password_for_AP_2”); // ESP8266-NodeMCU再启动后会扫描当前网络
wifiMulti.addAP(“ssid_from_AP_3”, “your_password_for_AP_3”); // 环境查找是否有这里列出的WiFi ID。如果有
Serial.println(“Connecting 。..”); // 则尝试使用此处存储的密码进行连接。
int i = 0;
while (wifiMulti.run() != WL_CONNECTED) { // 此处的wifiMulti.run()是重点。通过wifiMulti.run(),NodeMCU将会在当前
delay(1000); // 环境中搜索addAP函数所存储的WiFi。如果搜到多个存储的WiFi那么NodeMCU
Serial.print(i++); Serial.print(‘ ’); // 将会连接信号最强的那一个WiFi信号。
} // 一旦连接WiFI成功,wifiMulti.run()将会返回“WL_CONNECTED”。这也是
// 此处while循环判断是否跳出循环的条件。
// WiFi连接成功后将通过串口监视器输出连接成功信息
Serial.println(‘n’);
Serial.print(“Connected to ”);
Serial.println(WiFi.SSID()); // 通过串口监视器输出连接的WiFi名称
Serial.print(“IP address:t”);
Serial.println(WiFi.localIP()); // 通过串口监视器输出ESP8266-NodeMCU的IP
esp8266_server.begin(); // 启动网站服务
esp8266_server.on(“/”, HTTP_GET, handleRoot); // 设置服务器根目录即‘/’的函数‘handleRoot’
esp8266_server.on(“/go”, HTTP_POST, handlego); // 设置服务器根目录即‘/’的函数‘handleRoot’
esp8266_server.on(“/back”, HTTP_POST, handleback); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/left”, HTTP_POST, handleleft); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/right”, HTTP_POST, handleright); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.on(“/stop”, HTTP_POST, handlestop); // 设置处理LED控制请求的函数‘handleLED’
esp8266_server.onNotFound(handleNotFound); // 设置处理404情况的函数‘handleNotFound’
Serial.println(“HTTP esp8266_server started”);// 告知用户ESP8266网络服务功能已经启动
}
void loop(void){
esp8266_server.handleClient(); // 检查http服务器访问
}
/*设置服务器根目录即‘/’的函数‘handleRoot’
该函数的作用是每当有客户端访问NodeMCU服务器根目录时,
NodeMCU都会向访问设备发送 HTTP 状态 200 (Ok) 这是send函数的第一个参数。
同时NodeMCU还会向浏览器发送HTML代码,以下示例中send函数中第三个参数,
也就是双引号中的内容就是NodeMCU发送的HTML代码。该代码可在网页中产生LED控制按钮。
当用户按下按钮时,浏览器将会向NodeMCU的/LED页面发送HTTP请求,请求方式为POST。
NodeMCU接收到此请求后将会执行handleLED函数内容*/
void handleRoot() {
esp8266_server.send(200, “text/html”, “《center》《h1》NodeMcu motor expansion board to control the motor《/h1》Through the following buttons, I can control two DC TT motors through the ESP8266 NodeMcu motor extension base《/p》《form action=”/go“ method=”POST“》《input type=”submit“ value=”forward“》《/form》《br》《form action=”/back“ method=”POST“》《input type=”submit“ value=”retreat“》《/form》《br》《form action=”/left“ method=”POST“》《input type=”submit“ value=”turn left“》《/form》《br》《form action=”/right“ method=”POST“》《input type=”submit“ value=”turn right“》《/form》《br》《form action=”/stop“ method=”POST“》《input type=”submit“ value=”break“》《/form》《/center》”);}
//处理前进控制请求的函数‘handlego’
void handlego() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, LOW);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理后退控制请求的函数‘handleback’
void handleback() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, HIGH);
digitalWrite(D4, HIGH);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理左转控制请求的函数‘handleleft’
void handleleft() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, HIGH);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理右转控制请求的函数‘handleright’
void handleright() {
analogWrite(D1, 600);
analogWrite(D2, 600);
digitalWrite(D3, LOW);
digitalWrite(D4, HIGH);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
//处理停止控制请求的函数‘handlestop’
void handlestop() {
analogWrite(D1, 0);
analogWrite(D2, 0);
digitalWrite(D3, LOW);
digitalWrite(D4, LOW);
esp8266_server.sendHeader(“Location”,“/”); // 跳转回页面根目录
esp8266_server.send(303); // 发送Http相应代码303 跳转
}
// 设置处理404情况的函数‘handleNotFound’
void handleNotFound(){
esp8266_server.send(404, “text/plain”, “404: Not found”); // 发送 HTTP 状态 404 (未找到页面) 并向浏览器发送文字 “404: Not found”
}
实验部分
在接线完毕和程序烧录完成之后,打开串口监视器,浏览器地址栏中写入IP地址,即可打开控制页面。
下一步实现
电机的调速是通过预先设定好的PWM值去调控,博主正构思网页中加入改变PWM值的按键,进行实时调速。

 举报
举报




