1、预备知识
这节设计到的知识,包括自动控制系统的工程设计方法。
通常情况下,一个实际系统可以通过工程上的近似处理和调节器校正变换成 典型I(前面已讲) 或 典型 II 系统。
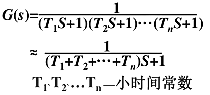
本节用到的工程上近似处理方法:小惯性群的近似处理,自动控制系统中有多个小时间常数的惯性环节相串联的情况,在一定条件下可以将这些小惯性环节合并为一个惯性环节。
调节器的结构选择的基本思路:将控制对象校正成典型I或者典型II系统。
2、 电流内环调节器设计
矢量控制系统的电流环是对 iq进行控制,控制的是定子电流,进而控制电机转矩。
电流内环的作用:在电机启动过程中能够以最大电流启动,同时在外部扰动时能够快速恢复,加快动态跟踪响应速度,提高系统的稳定性。
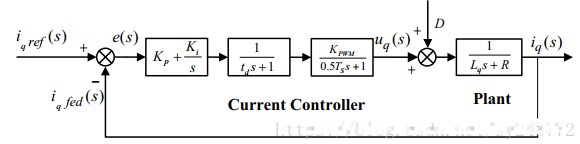
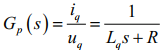
上图为电流内环的流程图,电流内环的输入为电流信号的误差值,输出为参考电压,控制电动机转矩。第一个环节是PI调节器(传函上节已讲),第二个环节是延迟环节,第三个环节是PWM环节。其中延迟环节和PWM逆变器环节的传函都是惯性环节。其中电机传递函数可通过近似处理为:
说下电机传函的由来,前面讲过电机在qd坐标系下忽略耦合项的电压平衡方程:
上式拉式变换就得到电机的传函。
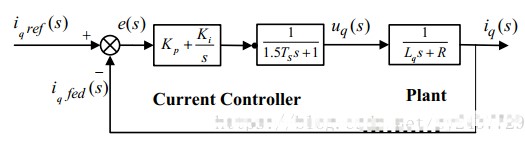
在开关频率为15KHZ时,PWM逆变器和延迟环节的时间常数就很小。工程近似就可以把延迟环节和PWM环节合并处理,记 td = Ts ,并将 Kpwm(PWM逆变器的增益)看成 1 来处理:
因为时间常数Ts很小,那么分母的二次项系数可以看做0.
则可得以下流程图:
对以上流程图分析,将电流环按照典型的 I 型系统来整定。
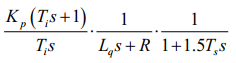
则开环传递函数:
上图中PI调节器的传函化成了尾I型 K i = K p T i K_{i}=frac{K_{p}}{T_{i}} Ki=TiKp,若使得 Ti = Lq / R 可以得到 整定后开环传函:
G ( s ) = K p T i ∗ R ∗ s ∗ ( 1.5 T s s + 1 ) = K p L q ∗ s ∗ ( 1.5 T s s + 1 ) G_{(s)}=frac{K_{p}}{T_{i}*R*s*(1.5T_{s}s+1)}=frac{K_{p}}{L_{q}*s*(1.5T_{s}s+1)} G(s)=Ti∗R∗s∗(1.5Tss+1)Kp=Lq∗s∗(1.5Tss+1)Kp
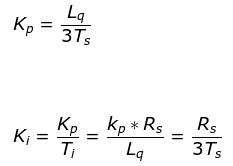
与典型I型二阶系统的开环传函对比:
其中 K = K p L q , T = 1.5 T s K=frac{K_{p}}{L_{q}} ,T=1.5T_{s} K=LqKp,T=1.5Ts 典型I型二阶系统按工程最佳整定 K T = 0.5 KT=0.5 KT=0.5(前面已讲)计算得出:
其中Ts为PWM的周期。这样PI调节器的 Kp, Ki参数就确定了。
1、预备知识
这节设计到的知识,包括自动控制系统的工程设计方法。
通常情况下,一个实际系统可以通过工程上的近似处理和调节器校正变换成 典型I(前面已讲) 或 典型 II 系统。
本节用到的工程上近似处理方法:小惯性群的近似处理,自动控制系统中有多个小时间常数的惯性环节相串联的情况,在一定条件下可以将这些小惯性环节合并为一个惯性环节。
调节器的结构选择的基本思路:将控制对象校正成典型I或者典型II系统。
2、 电流内环调节器设计
矢量控制系统的电流环是对 iq进行控制,控制的是定子电流,进而控制电机转矩。
电流内环的作用:在电机启动过程中能够以最大电流启动,同时在外部扰动时能够快速恢复,加快动态跟踪响应速度,提高系统的稳定性。
上图为电流内环的流程图,电流内环的输入为电流信号的误差值,输出为参考电压,控制电动机转矩。第一个环节是PI调节器(传函上节已讲),第二个环节是延迟环节,第三个环节是PWM环节。其中延迟环节和PWM逆变器环节的传函都是惯性环节。其中电机传递函数可通过近似处理为:
说下电机传函的由来,前面讲过电机在qd坐标系下忽略耦合项的电压平衡方程:
上式拉式变换就得到电机的传函。
在开关频率为15KHZ时,PWM逆变器和延迟环节的时间常数就很小。工程近似就可以把延迟环节和PWM环节合并处理,记 td = Ts ,并将 Kpwm(PWM逆变器的增益)看成 1 来处理:
因为时间常数Ts很小,那么分母的二次项系数可以看做0.
则可得以下流程图:
对以上流程图分析,将电流环按照典型的 I 型系统来整定。
则开环传递函数:
上图中PI调节器的传函化成了尾I型 K i = K p T i K_{i}=frac{K_{p}}{T_{i}} Ki=TiKp,若使得 Ti = Lq / R 可以得到 整定后开环传函:
G ( s ) = K p T i ∗ R ∗ s ∗ ( 1.5 T s s + 1 ) = K p L q ∗ s ∗ ( 1.5 T s s + 1 ) G_{(s)}=frac{K_{p}}{T_{i}*R*s*(1.5T_{s}s+1)}=frac{K_{p}}{L_{q}*s*(1.5T_{s}s+1)} G(s)=Ti∗R∗s∗(1.5Tss+1)Kp=Lq∗s∗(1.5Tss+1)Kp
与典型I型二阶系统的开环传函对比:
其中 K = K p L q , T = 1.5 T s K=frac{K_{p}}{L_{q}} ,T=1.5T_{s} K=LqKp,T=1.5Ts 典型I型二阶系统按工程最佳整定 K T = 0.5 KT=0.5 KT=0.5(前面已讲)计算得出:
其中Ts为PWM的周期。这样PI调节器的 Kp, Ki参数就确定了。



 举报
举报



