概述
电流滞环其实就是将输出的电流去和标准电流进行比较,如果相差超过一定的值,就会改变桥式逆变电路的导通情况。而滞环就是在比较过程中用到了一个滞回特性,可以用Simulink中的relay来实现。整个系统是一个闭环系统,被控量是输出的相电流,为什么控制电流是因为在电机控制中电流是决定电磁转矩的重要因素。
系统Simulink框图

电感的大小一定要调合适,大了电流上升慢,跟不上给定理想电流。小了又太快。我这里给的0.1H,1Ohm。
其中桥式组件的结构如下:

Scope1用来看控制电流的脉冲,它是由一个电流滞环的子系统生成的,而这个子系统的输入又是桥式电路的实际输出电流。这样一看,控制闭环形成。
滞环子系统
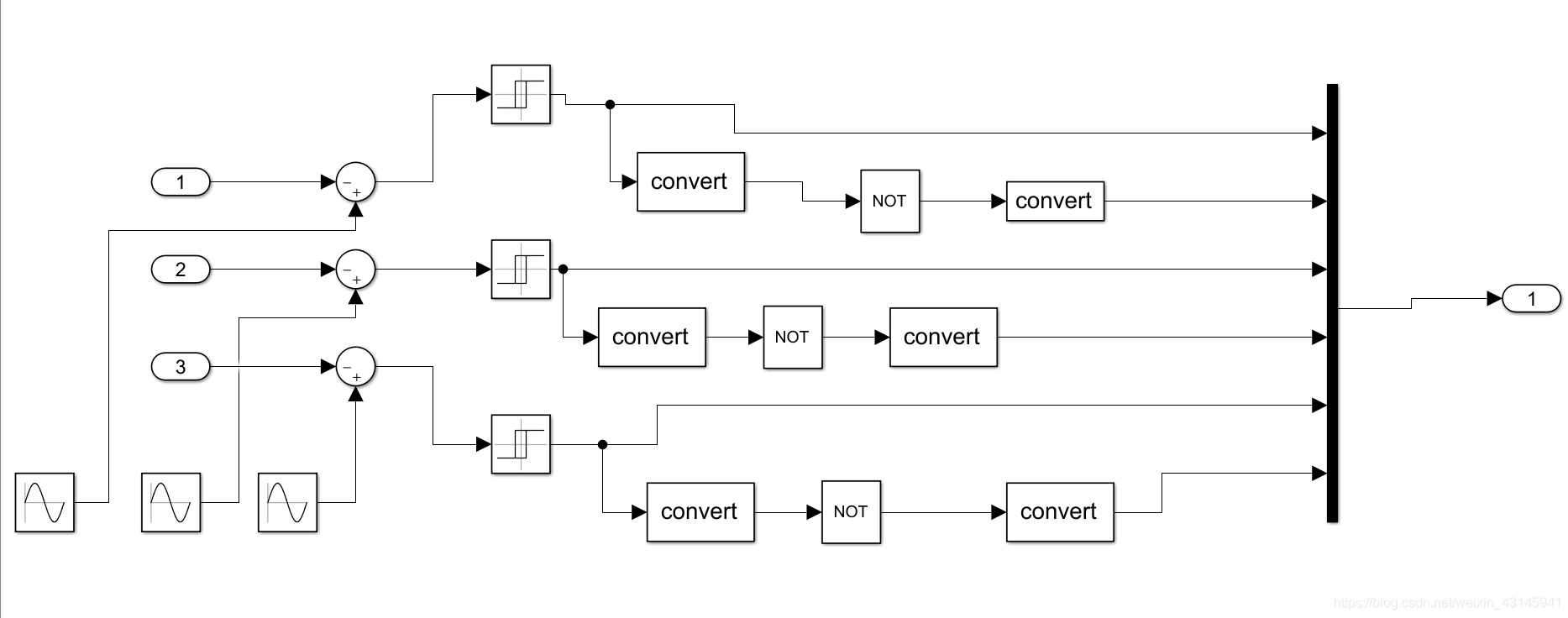
我们分析桥式电路以及滞环跟踪的理论即可知道桥式每一个桥臂在某一时刻只能有一个通,因此上下桥臂是互补的,因此我们每一个滞环输出都取一个反,最后六个信号MUX一下成为我们的控制脉冲。
这里的convert是转换数据的,NOT是取反。
结果
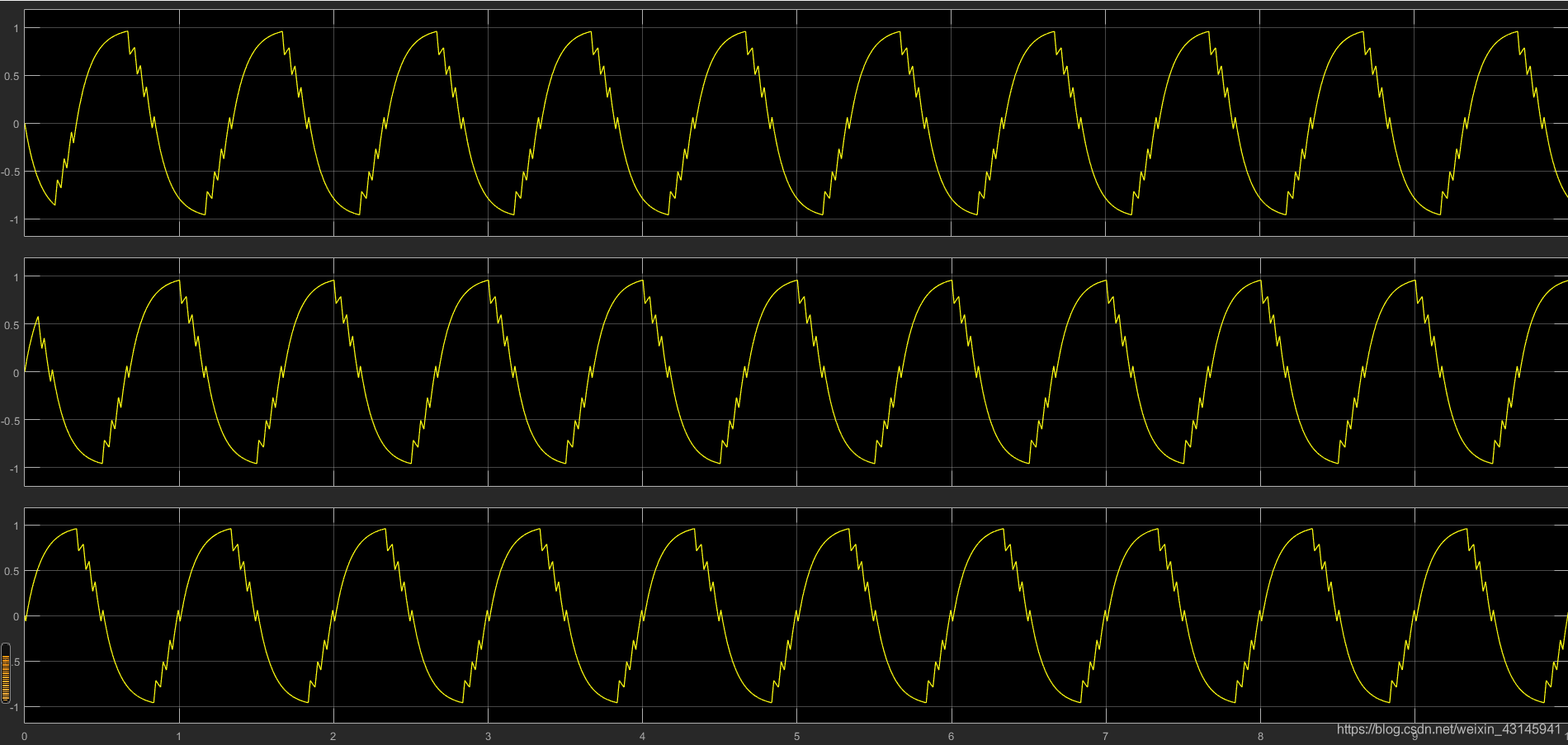
输出电流:
控制PWM:

概述
电流滞环其实就是将输出的电流去和标准电流进行比较,如果相差超过一定的值,就会改变桥式逆变电路的导通情况。而滞环就是在比较过程中用到了一个滞回特性,可以用Simulink中的relay来实现。整个系统是一个闭环系统,被控量是输出的相电流,为什么控制电流是因为在电机控制中电流是决定电磁转矩的重要因素。
系统Simulink框图
电感的大小一定要调合适,大了电流上升慢,跟不上给定理想电流。小了又太快。我这里给的0.1H,1Ohm。
其中桥式组件的结构如下:
Scope1用来看控制电流的脉冲,它是由一个电流滞环的子系统生成的,而这个子系统的输入又是桥式电路的实际输出电流。这样一看,控制闭环形成。
滞环子系统
我们分析桥式电路以及滞环跟踪的理论即可知道桥式每一个桥臂在某一时刻只能有一个通,因此上下桥臂是互补的,因此我们每一个滞环输出都取一个反,最后六个信号MUX一下成为我们的控制脉冲。
这里的convert是转换数据的,NOT是取反。
结果
输出电流:
控制PWM:

 举报
举报




