电流
登录
直播中
李皓圳
7年用户
1092经验值
私信
关注
[问答]
电流控制方式的优点是什么
开启该帖子的消息推送
电流控制
转矩
调速
电流控制方式有哪几种?
电流控制方式的优点是什么?
回帖
(1)
王永佳
2021-9-29 15:56:25
5、电流控制方式
在永磁同步电动机的矢量控制系统中,需要根据不同的控制要求,采用不同的电流控制方式,协调地控制
和
的大小, 在不同的电流控制方式下,电动机会呈现不同的特性,本文对各种电流控制方式进行介绍。
5.1
的控制方式
在
的控制方式中,无论
的大小如何,都保持
,通过改变
的值来实现对电动机转矩的控制。
永磁同步电动机的电磁转矩方程为
由于此时
,上式中的词组转矩变为0,电磁转矩的表达式可以进一步简化为
而
作为永磁体磁链,在电动机运行过程中保持不变,所以,通过控制转矩(交轴)电流分量
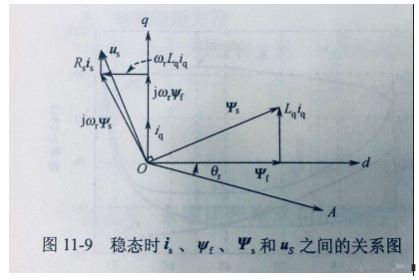
,就可以实现对电动机转矩的控制。在这种控制方式中,当电动机处于稳态时,电流矢量
,永磁体磁链矢量
,定子磁链矢量
和定子电压矢量
之间的关系如图11-9所示。
这种控制方式的优点是:由于定子电流的
分量恒等于0,使得定子电流矢量与永磁体磁链矢量相互独立,控制系统的结构简单,调节器设计容易,转矩控制设计容易,转矩控制性能好,转矩脉动小,可获得较宽的调速范围。
但是和异步电动机的矢量控制系统相比,在
的控制方式中,定子磁链是随着转矩电流分量
的增加而增加的,因此,这种控制方式又存在以下几个缺点:
(1)在同一转速下,当负载增加时,交轴电流分量
和负载成正比增加, 使得气隙磁链和反电动势都加大,迫使定子电压为克服反电动势而升高。为了保证调速系统在大负载下有足够的电源电压,变频器需要有足够的电压裕量。
(2)当负载增加时,定子电压矢量和定子电流矢量的夹角也会增大,造成电动机的功率因数降低。
(3)当凸极率
时,在
的控制方式下,电动机无磁阻转矩输出,降低了电动机的转矩输出能力。对于凸极式转子结构,单位电流产生的电磁转矩不是最大的。而对于隐极式转子结构,其交轴、直轴电感相同,无论
是否为零都不会产生磁阻转矩,所以这种控制方式对隐极式转子结构也就是最大转矩电流比控制。
由于存在以上缺点,导致这种控制方式的使用范围受到限制。为了克服这些问题,需要根据实际工况,按照一定的原则协调控制定子电流的
和
分量,而不是在调速过程中始终保持
不变。
5.2 MTPA控制方式
永磁同步电动机的MTPA控制方式即最大转矩电流比(Maximum Torque-per-Ampere,MTPA)控制方式,其含义是,在该控制方式下,幅值一定的定子电流产生的转矩最大,等价于对应相同的电磁转矩,在该控制方式下所需的定子电流最小,进而对应的电动机铜损也最小。
由电磁转矩表达式可以得到具有最大转矩电流比对应的电流相角
的值,
的表达式为
式中,
——定子电流的幅值。
如果电动机的转子为隐极式结构,则有
,上式的分母等于0,则不能按照上式来确定
角的值,但是,根据前面的讨论可知,对于隐极式转子结构,
的控制方式和MTPA控制方式是一样的。
对于凸极式转子结构,
,在MTPA控制方式中,根据上式和
角的定义可知,交轴电流
和直轴电流
之间的关系为
在实际的系统运行过程中,只要利用转速调节器的输出(即
轴电流的给定值
),根据上式计算出
,最后通过两个电流调节器的控制作用,使得实际电流值等于两个电流给定值,就实现了MTPA控制方式下的矢量控制系统。
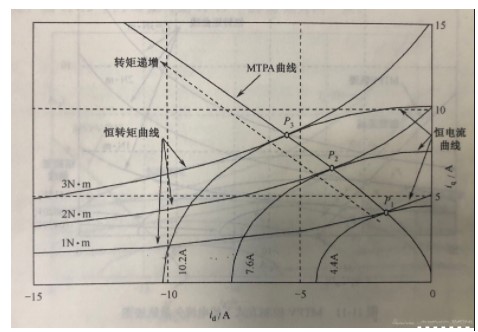
下图给出了前两式表示的在MTPA控制方式下的电流矢量的变化轨迹,还给出了恒转矩和恒电流曲线。
由图中可以看出,在电磁转矩分别为
时,电动机分别稳定运行在
,这三个点分别为恒转矩曲线和恒电流曲线的切点,
对应的电流值分别为
。另外,根据MTPA控制方式的定义可知,当电流幅值分别为
时,能够产生的最大转矩分别为
。
下图仅给出了在第二象限内
的特性曲线,可以证明,相应的曲线是关于
轴对称的,因此,很容易得到在第三象限内
曲线的变化情况。在第二象限内曲线描述的是,当转矩为正时电动机的运行情况,而在第三象限内曲线描述的是当转矩为负时电动机的运行情况。
图11-10 在MTPA控制方式下的电流矢量轨迹图
5.3 MTPV控制方式
MTPV控制方式即最大转矩电压比控制方式(Maximum Torque-per-Voltage,MTPV),其含义是在该控制方式下,幅值一定的定子电压产生的转矩最大,等价于对应相同的电磁转矩,在该方式下所需的定子电压最小,进而对应的电动机铁损也最小。
MTPV对应的工作点除了具有电压最小的特性之外,该点的定子磁链的幅值也最小。当调速系统具有最大转矩电压比时,
之间的关系如下式所示。
式中,
——定子磁链的幅值。
在实际系统中,确定
的过程为:首先把转速调节器的输出
代入到上式中,此时上式就构成了一个未知数为
和
的方程组;然后,解该方程组得到
和
的值;最后,把
和
代入上式中,就得到了
的值。
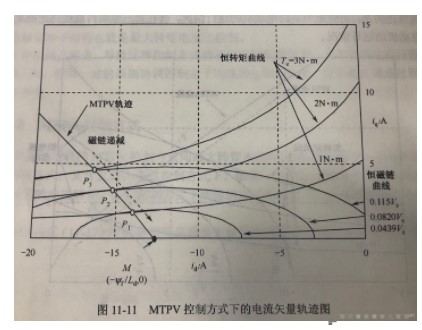
图11-11给出了由上式表示的在MTPV控制方式下的电流矢量的变化轨迹,还给出了恒转矩曲线和恒磁链曲线,注意恒磁链曲线具有椭圆的形状。
由图中可以看出,随着转矩的递减,最大转矩点沿着
点
点
点运动,
点为
恒转矩曲线与
恒磁链曲线的切点,表示当磁链为
时,电动机能够输出的最大转矩为
。
对应
恒磁链曲线上的最大转折点,
对应
恒磁链曲线上的最大转矩点。图中的
点对应的电流为
,此时对应的磁链幅值为0。
5.4 弱磁控制方式
根据磁链方程式,可知计算
的公式为
上式中永磁体磁链
是不可控制的,在运行过程中保持不变,但是,可以利用
轴定子电流
的电枢反应来调节磁链分量
,当
为负时,
减小,
也随之减小,这种减弱
的控制方法就被称为弱磁控制。弱磁控制通常用于高速区,使定子感应电动势的幅值(忽略定子电阻压降)等于逆变器能够输出的最高电压的幅值
。
忽略定子电阻压降,且在稳态有
电流分量
和
的关系为
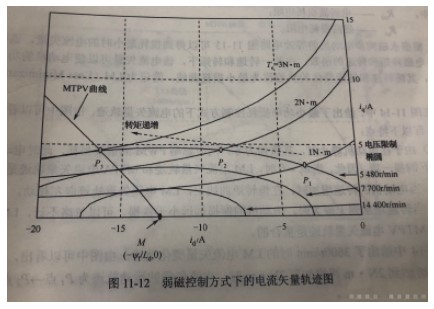
下图给出了上式描述的电流矢量的变化轨迹,同时给出了在不同转速下最大电压
对应的椭圆形曲线,在不同转速下最大电压曲线是不一样的,随着转速的升高,最大电压曲线呈收缩趋势,当转速无限大时,椭圆收缩于M点。椭圆形曲线的中心位于图中的M点处,下图中的M点于5.3节图中的M点为同一点。
在运行过程中, 根据上式控制电流矢量位于电压限制椭圆上,以保证逆变器输出最大电压
,由图中可以看出,电动机转速为
,当转矩由
增加到
再增加到
时,电流矢量的运动轨迹为
点
点
点,且再转矩变化的过程中,逆变器输出的电压幅值保持不变。
5.5 最小功率损耗控制
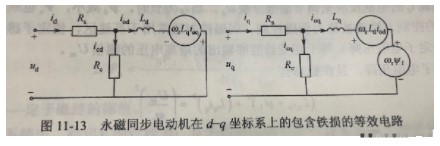
在永磁同步电动机的电压方程式的基础上,再考虑电动机的铁损,可以得到电动机在
坐标系上的等效电路,如下图所示。图中
为铁损电阻;
和
分别为
轴和
轴的铁损电流分量;
和
分别为
轴和
轴的磁化电流分量。由图中可以看出,在等效电路中,电流
和
都被分解成铁损电流分量和磁化电流分量两部分。
利用铁损电阻和铁损电流,电动机的铁损损耗可以表示为
铁损电阻并不是一个常数,而是一个随运行频率变化而变化的量,它与频率的关系可建模为
式中,
——电涡流损耗电阻;
——磁滞损耗电阻。
根据永磁同步电动机的等效电路图可以得到损耗最小时的电流矢量,该电流矢量是电磁转矩和转速的函数,在某一转速和转矩下,该电流矢量可以使电动机的功率损耗最小,其随转速和转矩变化的轨迹称为最小损耗曲线,简记为LM曲线。
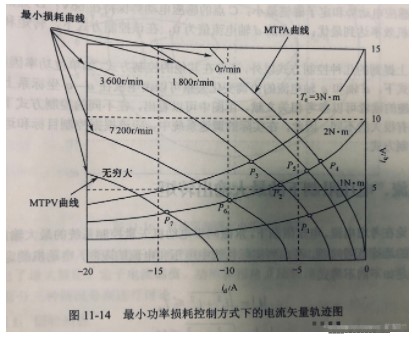
在下图中,给出了最小功率损耗控制方式下的电流矢量轨迹,由图中可以看出,LM轨迹具有以下特点:
(1)由于在电动机静止时,其铁损为零,同时忽略PWM的谐波损耗,此时电动机的损耗只剩下铜损一项,因此,当
时,LM电流矢量轨迹和MTPA电流矢量轨迹是重合的。
(2)当电动机的转速增加时,在恒转矩曲线时,LM电流矢量轨迹向左移动。
(3)当转速增加到无限大时,电动机的铜损远远小于铁损,可以忽略不计,LM电流矢量轨迹和MTPV电流矢量轨迹是重合的。
下图给出了
时的LM电流矢量变化轨迹,由图中可以看出,电磁转矩由
增加到
再增加到
时,电流矢量的运动轨迹为
点
点
点。当转矩固定为
不变,而转速由
逐渐增加时,电流矢量的运动轨迹为
点
点
点
点
点。
在实际控制中,不同工况下的
轴和
轴的电流给定值,可以通过公式计算的方法获得,也可以利用实验的方法获得,得到的电流给定值可以存储在表中,或者把这些数值拟合成近似函数,供程序实时调用。
5.6 各种控制方式的比较
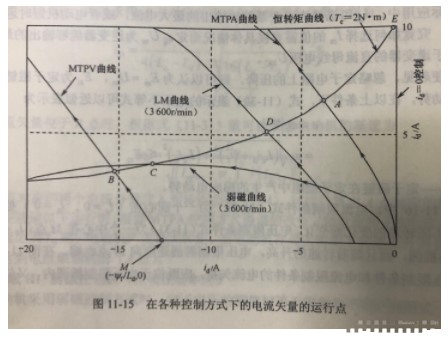
下图给出了在以上5种控制方式下的电流矢量的变化情况。
在弱磁控制方式和最小功率损耗控制方式下,电流矢量的变化轨迹是随着转速的变化而变化的,上图给出了当
时,在这两种控制方式下的电流矢量的变化轨迹,并且假设在若此控制方式下的最大输出电压
。
点
到
分别位于MTPA控制、MTPV控制、FW控制、LM控制和
控制的电流矢量轨迹中,且这些点对应的转矩都为
。由图中可以看出,
点对应的电流幅值最小;
点对应的感应电动势和定子磁链最小;
点的感应电动势保持在
;
点的电动机损耗最小,电动机效率达到最优;
点的
轴电流值为0,在该控制方式下,转矩和
轴电流成正比。
除了以上提到的几种控制方式以外,还存在其他的控制方式,如单位功率因数控制方式,在该控制方式下,
轴和
轴电流的协调变化关系可以由电机在
坐标系上的数学模型得到,感兴趣的读者可以参考相关文献。由图中可以看出,在不同的控制方式下,电动机的稳态运行点有很大的不同,因此,在实际的调速系统中,应该根据控制目标和运行条件来选择合适的控制方式。
5、电流控制方式
在永磁同步电动机的矢量控制系统中,需要根据不同的控制要求,采用不同的电流控制方式,协调地控制
和
的大小, 在不同的电流控制方式下,电动机会呈现不同的特性,本文对各种电流控制方式进行介绍。
5.1
的控制方式
在
的控制方式中,无论
的大小如何,都保持
,通过改变
的值来实现对电动机转矩的控制。
永磁同步电动机的电磁转矩方程为
由于此时
,上式中的词组转矩变为0,电磁转矩的表达式可以进一步简化为
而
作为永磁体磁链,在电动机运行过程中保持不变,所以,通过控制转矩(交轴)电流分量
,就可以实现对电动机转矩的控制。在这种控制方式中,当电动机处于稳态时,电流矢量
,永磁体磁链矢量
,定子磁链矢量
和定子电压矢量
之间的关系如图11-9所示。
这种控制方式的优点是:由于定子电流的
分量恒等于0,使得定子电流矢量与永磁体磁链矢量相互独立,控制系统的结构简单,调节器设计容易,转矩控制设计容易,转矩控制性能好,转矩脉动小,可获得较宽的调速范围。
但是和异步电动机的矢量控制系统相比,在
的控制方式中,定子磁链是随着转矩电流分量
的增加而增加的,因此,这种控制方式又存在以下几个缺点:
(1)在同一转速下,当负载增加时,交轴电流分量
和负载成正比增加, 使得气隙磁链和反电动势都加大,迫使定子电压为克服反电动势而升高。为了保证调速系统在大负载下有足够的电源电压,变频器需要有足够的电压裕量。
(2)当负载增加时,定子电压矢量和定子电流矢量的夹角也会增大,造成电动机的功率因数降低。
(3)当凸极率
时,在
的控制方式下,电动机无磁阻转矩输出,降低了电动机的转矩输出能力。对于凸极式转子结构,单位电流产生的电磁转矩不是最大的。而对于隐极式转子结构,其交轴、直轴电感相同,无论
是否为零都不会产生磁阻转矩,所以这种控制方式对隐极式转子结构也就是最大转矩电流比控制。
由于存在以上缺点,导致这种控制方式的使用范围受到限制。为了克服这些问题,需要根据实际工况,按照一定的原则协调控制定子电流的
和
分量,而不是在调速过程中始终保持
不变。
5.2 MTPA控制方式
永磁同步电动机的MTPA控制方式即最大转矩电流比(Maximum Torque-per-Ampere,MTPA)控制方式,其含义是,在该控制方式下,幅值一定的定子电流产生的转矩最大,等价于对应相同的电磁转矩,在该控制方式下所需的定子电流最小,进而对应的电动机铜损也最小。
由电磁转矩表达式可以得到具有最大转矩电流比对应的电流相角
的值,
的表达式为
式中,
——定子电流的幅值。
如果电动机的转子为隐极式结构,则有
,上式的分母等于0,则不能按照上式来确定
角的值,但是,根据前面的讨论可知,对于隐极式转子结构,
的控制方式和MTPA控制方式是一样的。
对于凸极式转子结构,
,在MTPA控制方式中,根据上式和
角的定义可知,交轴电流
和直轴电流
之间的关系为
在实际的系统运行过程中,只要利用转速调节器的输出(即
轴电流的给定值
),根据上式计算出
,最后通过两个电流调节器的控制作用,使得实际电流值等于两个电流给定值,就实现了MTPA控制方式下的矢量控制系统。
下图给出了前两式表示的在MTPA控制方式下的电流矢量的变化轨迹,还给出了恒转矩和恒电流曲线。
由图中可以看出,在电磁转矩分别为
时,电动机分别稳定运行在
,这三个点分别为恒转矩曲线和恒电流曲线的切点,
对应的电流值分别为
。另外,根据MTPA控制方式的定义可知,当电流幅值分别为
时,能够产生的最大转矩分别为
。
下图仅给出了在第二象限内
的特性曲线,可以证明,相应的曲线是关于
轴对称的,因此,很容易得到在第三象限内
曲线的变化情况。在第二象限内曲线描述的是,当转矩为正时电动机的运行情况,而在第三象限内曲线描述的是当转矩为负时电动机的运行情况。
图11-10 在MTPA控制方式下的电流矢量轨迹图
5.3 MTPV控制方式
MTPV控制方式即最大转矩电压比控制方式(Maximum Torque-per-Voltage,MTPV),其含义是在该控制方式下,幅值一定的定子电压产生的转矩最大,等价于对应相同的电磁转矩,在该方式下所需的定子电压最小,进而对应的电动机铁损也最小。
MTPV对应的工作点除了具有电压最小的特性之外,该点的定子磁链的幅值也最小。当调速系统具有最大转矩电压比时,
之间的关系如下式所示。
式中,
——定子磁链的幅值。
在实际系统中,确定
的过程为:首先把转速调节器的输出
代入到上式中,此时上式就构成了一个未知数为
和
的方程组;然后,解该方程组得到
和
的值;最后,把
和
代入上式中,就得到了
的值。
图11-11给出了由上式表示的在MTPV控制方式下的电流矢量的变化轨迹,还给出了恒转矩曲线和恒磁链曲线,注意恒磁链曲线具有椭圆的形状。
由图中可以看出,随着转矩的递减,最大转矩点沿着
点
点
点运动,
点为
恒转矩曲线与
恒磁链曲线的切点,表示当磁链为
时,电动机能够输出的最大转矩为
。
对应
恒磁链曲线上的最大转折点,
对应
恒磁链曲线上的最大转矩点。图中的
点对应的电流为
,此时对应的磁链幅值为0。
5.4 弱磁控制方式
根据磁链方程式,可知计算
的公式为
上式中永磁体磁链
是不可控制的,在运行过程中保持不变,但是,可以利用
轴定子电流
的电枢反应来调节磁链分量
,当
为负时,
减小,
也随之减小,这种减弱
的控制方法就被称为弱磁控制。弱磁控制通常用于高速区,使定子感应电动势的幅值(忽略定子电阻压降)等于逆变器能够输出的最高电压的幅值
。
忽略定子电阻压降,且在稳态有
电流分量
和
的关系为
下图给出了上式描述的电流矢量的变化轨迹,同时给出了在不同转速下最大电压
对应的椭圆形曲线,在不同转速下最大电压曲线是不一样的,随着转速的升高,最大电压曲线呈收缩趋势,当转速无限大时,椭圆收缩于M点。椭圆形曲线的中心位于图中的M点处,下图中的M点于5.3节图中的M点为同一点。
在运行过程中, 根据上式控制电流矢量位于电压限制椭圆上,以保证逆变器输出最大电压
,由图中可以看出,电动机转速为
,当转矩由
增加到
再增加到
时,电流矢量的运动轨迹为
点
点
点,且再转矩变化的过程中,逆变器输出的电压幅值保持不变。
5.5 最小功率损耗控制
在永磁同步电动机的电压方程式的基础上,再考虑电动机的铁损,可以得到电动机在
坐标系上的等效电路,如下图所示。图中
为铁损电阻;
和
分别为
轴和
轴的铁损电流分量;
和
分别为
轴和
轴的磁化电流分量。由图中可以看出,在等效电路中,电流
和
都被分解成铁损电流分量和磁化电流分量两部分。
利用铁损电阻和铁损电流,电动机的铁损损耗可以表示为
铁损电阻并不是一个常数,而是一个随运行频率变化而变化的量,它与频率的关系可建模为
式中,
——电涡流损耗电阻;
——磁滞损耗电阻。
根据永磁同步电动机的等效电路图可以得到损耗最小时的电流矢量,该电流矢量是电磁转矩和转速的函数,在某一转速和转矩下,该电流矢量可以使电动机的功率损耗最小,其随转速和转矩变化的轨迹称为最小损耗曲线,简记为LM曲线。
在下图中,给出了最小功率损耗控制方式下的电流矢量轨迹,由图中可以看出,LM轨迹具有以下特点:
(1)由于在电动机静止时,其铁损为零,同时忽略PWM的谐波损耗,此时电动机的损耗只剩下铜损一项,因此,当
时,LM电流矢量轨迹和MTPA电流矢量轨迹是重合的。
(2)当电动机的转速增加时,在恒转矩曲线时,LM电流矢量轨迹向左移动。
(3)当转速增加到无限大时,电动机的铜损远远小于铁损,可以忽略不计,LM电流矢量轨迹和MTPV电流矢量轨迹是重合的。
下图给出了
时的LM电流矢量变化轨迹,由图中可以看出,电磁转矩由
增加到
再增加到
时,电流矢量的运动轨迹为
点
点
点。当转矩固定为
不变,而转速由
逐渐增加时,电流矢量的运动轨迹为
点
点
点
点
点。
在实际控制中,不同工况下的
轴和
轴的电流给定值,可以通过公式计算的方法获得,也可以利用实验的方法获得,得到的电流给定值可以存储在表中,或者把这些数值拟合成近似函数,供程序实时调用。
5.6 各种控制方式的比较
下图给出了在以上5种控制方式下的电流矢量的变化情况。
在弱磁控制方式和最小功率损耗控制方式下,电流矢量的变化轨迹是随着转速的变化而变化的,上图给出了当
时,在这两种控制方式下的电流矢量的变化轨迹,并且假设在若此控制方式下的最大输出电压
。
点
到
分别位于MTPA控制、MTPV控制、FW控制、LM控制和
控制的电流矢量轨迹中,且这些点对应的转矩都为
。由图中可以看出,
点对应的电流幅值最小;
点对应的感应电动势和定子磁链最小;
点的感应电动势保持在
;
点的电动机损耗最小,电动机效率达到最优;
点的
轴电流值为0,在该控制方式下,转矩和
轴电流成正比。
除了以上提到的几种控制方式以外,还存在其他的控制方式,如单位功率因数控制方式,在该控制方式下,
轴和
轴电流的协调变化关系可以由电机在
坐标系上的数学模型得到,感兴趣的读者可以参考相关文献。由图中可以看出,在不同的控制方式下,电动机的稳态运行点有很大的不同,因此,在实际的调速系统中,应该根据控制目标和运行条件来选择合适的控制方式。
举报
更多回帖
rotate(-90deg);
回复
相关问答
电流控制
转矩
调速
电流
控制
型开关电源有哪些
优点
2021-10-14
1498
多路输出电源在以连续
方式
工作时的主要
优点
是什么?
2021-06-28
1071
平均
电流
模式
控制
有哪些优缺点?
2021-06-18
2349
矢量
控制
技术中的常见
电流
采集
方式
有哪几种
2021-09-06
1613
矢量
控制
中的
电流
环
控制
方式
有哪几种
2021-09-28
1167
直线电机具有什么
优点
?直线电机采用什么
控制
系统?
2021-03-15
2159
基于PI-PD
控制
器的四旋翼姿态
控制
方式
有什么
优点
?
2021-07-22
2053
什么是
电流
探头?
电流
探头有何
优点
2021-09-18
1561
传统GPIB
控制
有什么
优点
?
2021-05-11
1552
采样电阻加运放的
电流
采样有何
优点
2021-09-30
4276
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



