黄工无刷电机学习
登录
直播中
王磊
7年用户
1532经验值
私信
关注
[问答]
伺服电机的分类有哪些?如何选择品牌?
开启该帖子的消息推送
伺服舵机
伺服电机的内部结构与基本原理是什么?
伺服电机的分类有哪些?如何选择品牌?
模拟舵机和数字舵机的区别是什么?
回帖
(1)
余婧
2021-9-29 10:32:19
一、伺服电机(舵机)的基本概念:
伺服电机是一种传统的电机,又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。
二、伺服电机的内部结构与基本原理:
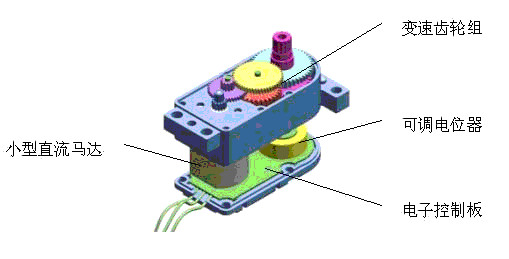
伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低。
标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
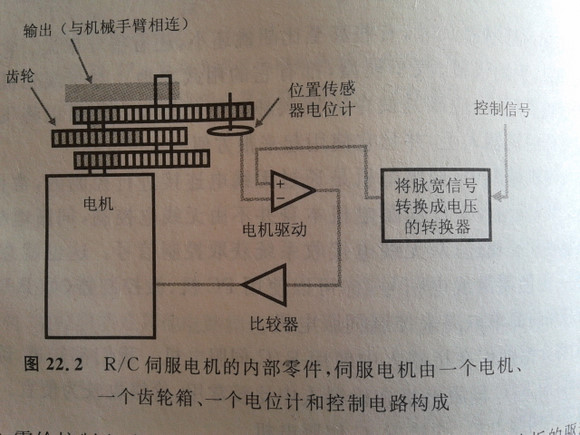
减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。
三、伺服电机的分类与选购品牌:
舵机有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
目前主要应用于工业界的伺服电机包括直流电机、永磁交流伺服电机、感应交流伺服电机,控制器的功能在于提供整个伺服系统的闭环控制,如扭矩控制、速度控制、位置控制等。
直流伺服系统电机的分类为:
1、小惯量直流电机
为减少电机的转子的转动惯量,转子形状通常做得细长。这种小惯量直流电机特点是:转动惯量小,基本上是普通电机的1/10;反应快,有良好的换向性能;速度均匀性好,在低速运动中,优势更为明显;扭矩大,最大扭矩约为额定值的10倍。
2、直流印刷电机
多层同轴的玻璃胶布板圆盘形转子的有效组合构成了直流印刷电机的转子,圆盘的每一层都印刷有铜箔绕组。这样的结构可以有效地提高绕组的作用力矩,且转子质量轻,因而所需要的较大的扭矩就可以得到了。此种电机的特点是:简单的电机结构,成本低;电机绕组和空气的接触面很大,几乎完全接触,通风散热性能好,因而过载能力强;既轻又具有小的电磁惯性,这样良好的条件让直流印刷电机具有好的换向性能和调速性能。
3、杯形转子直流电机
这种杯形电机如其名字一样,转子做成空心杯的形状,这样的结构可以把转动惯量减小,同时就把可靠性提高了。
4、宽调速直流电机
这种电机的优点有:a.响应速度快,因此转子惯性得到了保留,还提高了扭矩;功率能够得到一个足够大的值,对要求有大负载和其他特殊配重的系统中比较适
合。
大惯量宽调速直流伺服电机和小惯量直流伺服电机通常作为直流伺服系统的伺服电机使用。前者是有刷结构的,而且结构复杂、转速有限、价格较高。只适应于某些特殊场合。后者结构简单且快速性好。被应用于众多的伺服系统中。
常见的舵机品牌有:Futaba、JR、TowerPro、SANWA、Hitec、KO、Kraft、
Sawwa、Airtronics、Cirrus、Deahwah、Fleet,国产的品牌深圳的春天等。
四、模拟舵机和数字舵机的区别
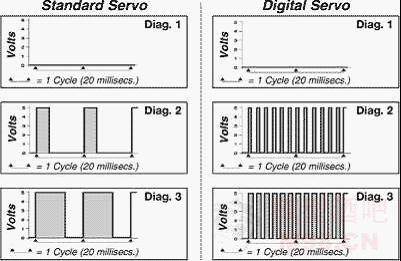
模拟舵机由功率运算放大器等接成惠斯通电桥,根据接收到模拟电压控制指令和机械连动位置传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位置。数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽1 ms为上限位置,1.5ms为中位,2ms为下限位置)形式的控制驱动信号,迅速驱动电机执行位置输出,直至直流伺服电机控制芯片检测到位置输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位置输出。 数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。在过去的几年,舵机的技术发展是非常迅速的,更小的体积,更高的速度,更大的扭力,这些都是舵机发展的方向。近年出现的"数码舵机",是舵机的一大进步。
数码舵机在工作方式上的优点: 数码舵机比传统的模拟舵机,即使是使用无线圈马达的模拟舵机,在工作方式上也有很多优点。但是这些优点也同时带来了一些缺点。在这里,我们尝试将为大家分析数码舵机的好的方面和不好的方面,也为大家解除一些疑问。
首先,数码舵机和模拟舵机,在微处理器以外并没有什么分别(微处理器用于分析从接收机的输入信号,并控制马达转动)。但是,我们必须认识到数码舵机和模拟舵机的差别其实是非常大的,虽然它们有着相同的马达、齿轮和外壳、同样的反馈电位器,看起来极其相似。数码舵机最大的差别是在于它处理接收机的输入信号的方式。然后控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。 传统的舵机在空载的时候,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。这种动力实际上每秒五十周期的,被调制成开/关脉冲的最大电压,并产生小段小段的动力。 当加大每一个脉冲的宽度的时候,如电子变速器的效能就会出现,直到最大的动力/电压被传送到马达,马达转动使舵机摇臂指到一个新的位置。然后,当舵机电位器告诉电子部分它已经到达指定的位置,那么动力脉冲就会减小脉冲宽度,并使马达减速。直到没有任何动力输入,马达完全停止。您可以想象,一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。这也是为什么模拟舵机有“无反应区”的存在。比如说,舵机对于发射机的细小动作,反应非常迟钝,或者根本就没有反应。
数码舵机截然不同的优点和特性:
第一,因为微处理器的关系,数码舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号,根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
第二,数码舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,现在是300脉冲/秒。虽然,以为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数码舵机提供更高的精度和更好的固定力量。如果您需要您的舵机具有以下特性: 更高的精度,更少的无反应区,更准确的定位;更快的控制反应,更强的加速;在舵机的整行程中更平均的扭力;舵机在一个位置上更强的固定力量。那么,数码舵机是唯一的解决方案。
一、伺服电机(舵机)的基本概念:
伺服电机是一种传统的电机,又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。
二、伺服电机的内部结构与基本原理:
伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低。
标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。
三、伺服电机的分类与选购品牌:
舵机有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
目前主要应用于工业界的伺服电机包括直流电机、永磁交流伺服电机、感应交流伺服电机,控制器的功能在于提供整个伺服系统的闭环控制,如扭矩控制、速度控制、位置控制等。
直流伺服系统电机的分类为:
1、小惯量直流电机
为减少电机的转子的转动惯量,转子形状通常做得细长。这种小惯量直流电机特点是:转动惯量小,基本上是普通电机的1/10;反应快,有良好的换向性能;速度均匀性好,在低速运动中,优势更为明显;扭矩大,最大扭矩约为额定值的10倍。
2、直流印刷电机
多层同轴的玻璃胶布板圆盘形转子的有效组合构成了直流印刷电机的转子,圆盘的每一层都印刷有铜箔绕组。这样的结构可以有效地提高绕组的作用力矩,且转子质量轻,因而所需要的较大的扭矩就可以得到了。此种电机的特点是:简单的电机结构,成本低;电机绕组和空气的接触面很大,几乎完全接触,通风散热性能好,因而过载能力强;既轻又具有小的电磁惯性,这样良好的条件让直流印刷电机具有好的换向性能和调速性能。
3、杯形转子直流电机
这种杯形电机如其名字一样,转子做成空心杯的形状,这样的结构可以把转动惯量减小,同时就把可靠性提高了。
4、宽调速直流电机
这种电机的优点有:a.响应速度快,因此转子惯性得到了保留,还提高了扭矩;功率能够得到一个足够大的值,对要求有大负载和其他特殊配重的系统中比较适
合。
大惯量宽调速直流伺服电机和小惯量直流伺服电机通常作为直流伺服系统的伺服电机使用。前者是有刷结构的,而且结构复杂、转速有限、价格较高。只适应于某些特殊场合。后者结构简单且快速性好。被应用于众多的伺服系统中。
常见的舵机品牌有:Futaba、JR、TowerPro、SANWA、Hitec、KO、Kraft、
Sawwa、Airtronics、Cirrus、Deahwah、Fleet,国产的品牌深圳的春天等。
四、模拟舵机和数字舵机的区别
模拟舵机由功率运算放大器等接成惠斯通电桥,根据接收到模拟电压控制指令和机械连动位置传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位置。数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽1 ms为上限位置,1.5ms为中位,2ms为下限位置)形式的控制驱动信号,迅速驱动电机执行位置输出,直至直流伺服电机控制芯片检测到位置输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位置输出。 数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。在过去的几年,舵机的技术发展是非常迅速的,更小的体积,更高的速度,更大的扭力,这些都是舵机发展的方向。近年出现的"数码舵机",是舵机的一大进步。
数码舵机在工作方式上的优点: 数码舵机比传统的模拟舵机,即使是使用无线圈马达的模拟舵机,在工作方式上也有很多优点。但是这些优点也同时带来了一些缺点。在这里,我们尝试将为大家分析数码舵机的好的方面和不好的方面,也为大家解除一些疑问。
首先,数码舵机和模拟舵机,在微处理器以外并没有什么分别(微处理器用于分析从接收机的输入信号,并控制马达转动)。但是,我们必须认识到数码舵机和模拟舵机的差别其实是非常大的,虽然它们有着相同的马达、齿轮和外壳、同样的反馈电位器,看起来极其相似。数码舵机最大的差别是在于它处理接收机的输入信号的方式。然后控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。 传统的舵机在空载的时候,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。这种动力实际上每秒五十周期的,被调制成开/关脉冲的最大电压,并产生小段小段的动力。 当加大每一个脉冲的宽度的时候,如电子变速器的效能就会出现,直到最大的动力/电压被传送到马达,马达转动使舵机摇臂指到一个新的位置。然后,当舵机电位器告诉电子部分它已经到达指定的位置,那么动力脉冲就会减小脉冲宽度,并使马达减速。直到没有任何动力输入,马达完全停止。您可以想象,一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。这也是为什么模拟舵机有“无反应区”的存在。比如说,舵机对于发射机的细小动作,反应非常迟钝,或者根本就没有反应。
数码舵机截然不同的优点和特性:
第一,因为微处理器的关系,数码舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号,根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
第二,数码舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,现在是300脉冲/秒。虽然,以为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数码舵机提供更高的精度和更好的固定力量。如果您需要您的舵机具有以下特性: 更高的精度,更少的无反应区,更准确的定位;更快的控制反应,更强的加速;在舵机的整行程中更平均的扭力;舵机在一个位置上更强的固定力量。那么,数码舵机是唯一的解决方案。
举报
更多回帖
rotate(-90deg);
回复
相关问答
伺服舵机
伺服
系统的组成及
分类
2021-02-22
1976
选择
伺服
电机
要考虑哪些因素
2021-09-29
1625
如何去
选择
伺服
电机
?
伺服
电机
的选型
有
哪些原则?
2021-06-28
1364
如何正确
选择
伺服
电机
和步进
电机
?
2021-11-15
3576
编码器的结构域工作原理是什么?
伺服
电机
与编码器的工作是什么?
2021-06-28
3018
浅析
伺服
电机
的定义及
分类
2021-10-09
1764
如何
选择
伺服
电机
的控制方式
2021-01-22
1210
如何确定
选择
伺服
电机
控制方式
2021-01-21
1774
请问如何
选择
合适机械的
伺服
电机
?
2021-09-27
762
小编跟大家讲讲怎样来
选择
合适的
伺服
电机
?
2021-06-28
1171
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分




 举报
举报



