源码链接:Modbus传感器采集协议
一、硬件
1、传感器:为液压传感器,12vDC,RS485数据输出,采用Modbus协议通信
2、电路:根据传感器属性,电路主要是两部分,通信电路和电源电源
(1)485电路:由于485是半双工通信,需要控制收发,所以索性在把电路设计成自动收发电路
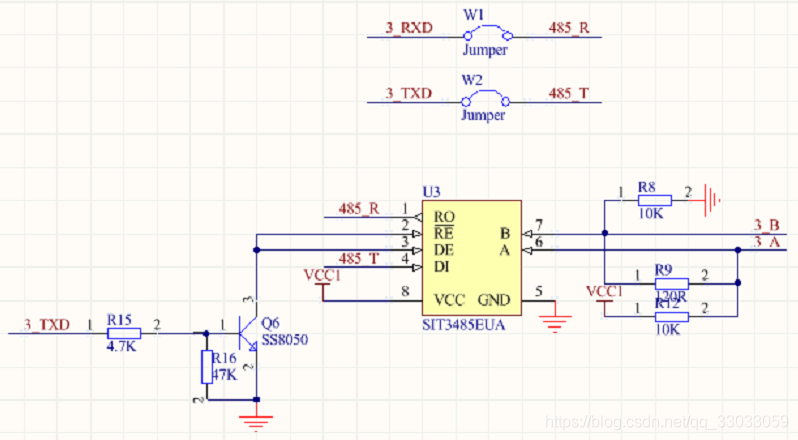
接跳线帽W1、W2即使用RS485收发,不接就是普通串口收发。RE和DE是收发使能,选择485模式:3_TXD常高,使能接受;当发送数据时,数据的起始位(下降沿)将3_TXD引脚电平拉低,将顺便使能发送。传感器接3_A、3_B。
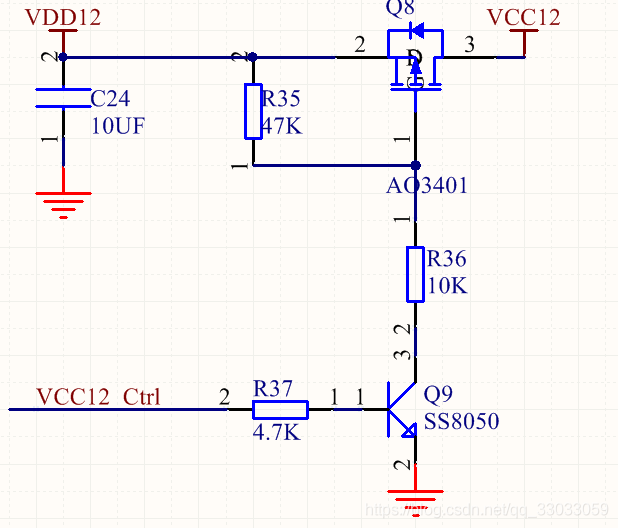
(2)开关电路:主要是为了控制传感器开关,以降低功耗
二、测试485电路
1、485电路测试程序
对于单片机来说,其实仍然是串口通信,只不过经过485芯片实现了RS232电平→RS485电平。
(1)初始化串口3,并在初始化时开启串口接收中断
void MX_USART3_UART_Init(void)
{
huart3.Instance = USART3;
huart3.Init.BaudRate = 9600;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
Usart3RecIT();//开启串口3接收中断
start_capture();//发送请求帧
}
(2)接收中断回调函数中保存串口数据
(void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart-》Instance == USART3){//RS485设备
HAL_UART_Receive_IT(&huart3, &uart3Data, 1);
uart3WriteByte(uart3Data);//接收到的数据写入缓存
uart3DataFlg = 1;
}
}
3)缓存数据:环形队列,不啰嗦
#define SENSOR_485_DATA_BUFFER_MAX_LENGTH 60
typedef struct {
uint16_t front;
uint16_t rear;
uint8_t* buffer;
uint32_t maxSize;
}Buffer_t;
static Buffer_t sensor485Buffer;
uint8_t sensor485DataBuffer[SENSOR_485_DATA_BUFFER_MAX_LENGTH];//缓存数组
void uart3WriteByte(uint8_t data)
{
Buffer_Puts(&sensor485Buffer,&data,1);//入队
}
bool Buffer_Puts(Buffer_t* buffer, uint8_t* data, uint16_t length)
{
if (buffer-》maxSize - Buffer_Size(buffer) 《= length)//队满
return false;
for (uint16_t i = 0; i《length; ++i)//队列未满
{
buffer-》rear = (buffer-》rear + 1) % buffer-》maxSize;
buffer-》buffer[buffer-》rear] = data[i];//进队
}
return true;
}
(4)这个接口,是为了向传感器发送指令,请求传感器数据,指令需要查看传感器指令定义,属于协议那部分,先测试
void start_capture(){
uint8_t TxData[10]= “1111111111”;
HAL_UART_Transmit(&huart3,TxData,10,0xffff);
HAL_Delay(100);
}
2、在Keil中Debug,用串口助手向单片机发送数据,查看数组sensor485DataBuffer接收到了,接收是可以了
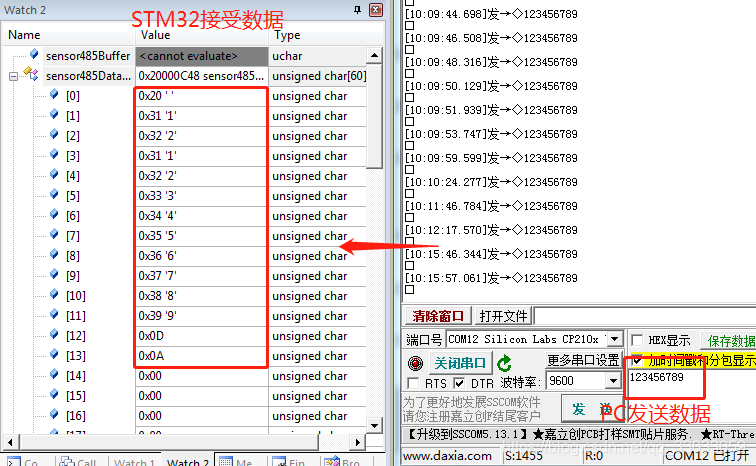
3、但是我遇到了问题,上位机没有接受到2-(4)发送的“1111111111”,单片机发送出现了问题
(1)分别检查TX、R15、R16都有信号出来
(2)第一反应是485芯片发送使能没有成功,检查RE和DE引脚,果然一直是低电平,说明三极管一直导通,没有阻塞过
(3)无奈之下,干脆用反相器替换了三极管

(4)然后,就可以了…
三、加入Modbus协议
1、协议原理
(1)以上测试说明:链路层硬件协议√;
(2)但是问题来了,只有硬件协议可以和传感器通信吗? 当然不行,传感器又不是电脑,它没有上位机:你点一下发送就把数据发出去了。这个时候需要单片机来告知它发送。所以我们还需要:链路层软件协议Modbus协议√;
(3)我们选取Modbus协议中对我们编程有帮助的几点:
以帧的形式通信,有ASCII和RTU两种模式,帧中的地址、功能码等都是一个或多个字节,每个字节是一个8位串口数据

如果一个串口连接多个4856设备,可以通过地址区分不同485设备,当然串口资源充足也可以挂载在多个串口上
RTU模式通过两帧数据的时间间隔,区分前后两帧数据,如果串口数据间隔大于3.5个字节,那么就认为一帧数据结束了,在9600bps/s波特率下,传输3.5个字节时间大概为4ms;ASCII模式读回车换行就行了
如果要读取传感器状态、数据,都需要发送请求帧
数据需要CRC校验
具体指令规则需查看传感器指令文档
2、 根据传感器指令文档编程
(1)打开传感器开关
void open_sensor(){
//控制电源开关的引脚拉高
}
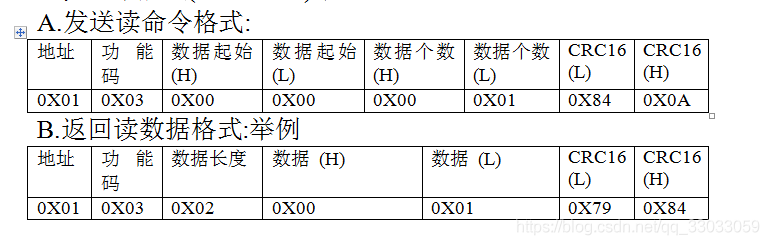
(2)发送读取命令
void start_read(){
uint8_t TxData[10]= “010300000001840A”;
HAL_UART_Transmit(&huart3,TxData,10,0xffff);
HAL_Delay(100);
}
(3)读取数据
在串口接收中断中接收数据,如果下一个串口数据在4ms之内到来,那么重新计时,定时器中断不会生效;如果没来,则认为接收完一帧数据,程序会进入定时器中断,这个很关键
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart-》Instance == USART3){
HAL_TIM_Base_Stop_IT(&htim5);
HAL_UART_Receive_IT(&huart3, &uart3Data, 1);
uart3WriteByte(uart3Data);
HAL_TIM_Base_Start_IT(&htim5);//开始计时4ms,即modbus设备在9600波特率下传输一帧数据的时间间隔
uart3DataFlg = 1;
}
}
在定时器中断中进行处理数据
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim5))
{
//TIM_ClearITPendingBit(TIM5,TIM_IT_Update); //标准库需要清除TIMx更新中断标志,HAL库不需要,直接写业务逻辑就行
HAL_TIM_Base_Stop_IT(&htim5);
Modbus_Work();//数据处理函数
Uart3BufClear();
RS485_RX_CNT++;
}
}
(4)数据CRC校验
int16_t CRC_16( int8_t *vptr, int8_t len)
{
uint16_t MODBUSCRC = 0xffff;
uint16_t POLYNOMIAL = 0xa001;
uint8_t i, j;
for (i = 0; i 《 len; i++)
{
MODBUSCRC ^= vptr[i] ;
for (j = 0; j 《 8; j++)
{
if ((MODBUSCRC & 0x0001) != 0)
{
MODBUSCRC 》》= 1;
MODBUSCRC ^= POLYNOMIAL;
}
else
{
MODBUSCRC 》》= 1;
}
}
}
return MODBUSCRC;
}
CRC原理就不啰嗦了
不同种类的CRC校验的多项式并不统一,这里是0xA001,文档中会说明
(5)数据解析
int Modbus_Work(void)
{
double depth;
uint16_t depth_high;
uint16_t depth_low;
int len = strlen((char*)(sensor485DataBuffer+1));
if(sensor485DataBuffer[1] == 0x01)//从机地址正确则进行换算
{
if((CRC_16((int8_t *)(sensor485DataBuffer+1),len))==0x0000){//CRC校验
depth_high = sensor485DataBuffer[3];
depth_low = sensor485DataBuffer[4];
depth = (double)((depth_high 《《 8) + depth_low)/1000;
}
}memset(sensor485DataBuffer,0,len+1);
return depth;//这就是水深值了
}
四、注意事项
1、RS485通信,一定要A接A,B接B,不是反接。
2、采集线过长,要考虑使用屏蔽线。
源码链接:Modbus传感器采集协议
一、硬件
1、传感器:为液压传感器,12vDC,RS485数据输出,采用Modbus协议通信
2、电路:根据传感器属性,电路主要是两部分,通信电路和电源电源
(1)485电路:由于485是半双工通信,需要控制收发,所以索性在把电路设计成自动收发电路
接跳线帽W1、W2即使用RS485收发,不接就是普通串口收发。RE和DE是收发使能,选择485模式:3_TXD常高,使能接受;当发送数据时,数据的起始位(下降沿)将3_TXD引脚电平拉低,将顺便使能发送。传感器接3_A、3_B。
(2)开关电路:主要是为了控制传感器开关,以降低功耗
二、测试485电路
1、485电路测试程序
对于单片机来说,其实仍然是串口通信,只不过经过485芯片实现了RS232电平→RS485电平。
(1)初始化串口3,并在初始化时开启串口接收中断
void MX_USART3_UART_Init(void)
{
huart3.Instance = USART3;
huart3.Init.BaudRate = 9600;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
Usart3RecIT();//开启串口3接收中断
start_capture();//发送请求帧
}
(2)接收中断回调函数中保存串口数据
(void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart-》Instance == USART3){//RS485设备
HAL_UART_Receive_IT(&huart3, &uart3Data, 1);
uart3WriteByte(uart3Data);//接收到的数据写入缓存
uart3DataFlg = 1;
}
}
3)缓存数据:环形队列,不啰嗦
#define SENSOR_485_DATA_BUFFER_MAX_LENGTH 60
typedef struct {
uint16_t front;
uint16_t rear;
uint8_t* buffer;
uint32_t maxSize;
}Buffer_t;
static Buffer_t sensor485Buffer;
uint8_t sensor485DataBuffer[SENSOR_485_DATA_BUFFER_MAX_LENGTH];//缓存数组
void uart3WriteByte(uint8_t data)
{
Buffer_Puts(&sensor485Buffer,&data,1);//入队
}
bool Buffer_Puts(Buffer_t* buffer, uint8_t* data, uint16_t length)
{
if (buffer-》maxSize - Buffer_Size(buffer) 《= length)//队满
return false;
for (uint16_t i = 0; i《length; ++i)//队列未满
{
buffer-》rear = (buffer-》rear + 1) % buffer-》maxSize;
buffer-》buffer[buffer-》rear] = data[i];//进队
}
return true;
}
(4)这个接口,是为了向传感器发送指令,请求传感器数据,指令需要查看传感器指令定义,属于协议那部分,先测试
void start_capture(){
uint8_t TxData[10]= “1111111111”;
HAL_UART_Transmit(&huart3,TxData,10,0xffff);
HAL_Delay(100);
}
2、在Keil中Debug,用串口助手向单片机发送数据,查看数组sensor485DataBuffer接收到了,接收是可以了
3、但是我遇到了问题,上位机没有接受到2-(4)发送的“1111111111”,单片机发送出现了问题
(1)分别检查TX、R15、R16都有信号出来
(2)第一反应是485芯片发送使能没有成功,检查RE和DE引脚,果然一直是低电平,说明三极管一直导通,没有阻塞过
(3)无奈之下,干脆用反相器替换了三极管
(4)然后,就可以了…
三、加入Modbus协议
1、协议原理
(1)以上测试说明:链路层硬件协议√;
(2)但是问题来了,只有硬件协议可以和传感器通信吗? 当然不行,传感器又不是电脑,它没有上位机:你点一下发送就把数据发出去了。这个时候需要单片机来告知它发送。所以我们还需要:链路层软件协议Modbus协议√;
(3)我们选取Modbus协议中对我们编程有帮助的几点:
以帧的形式通信,有ASCII和RTU两种模式,帧中的地址、功能码等都是一个或多个字节,每个字节是一个8位串口数据
如果一个串口连接多个4856设备,可以通过地址区分不同485设备,当然串口资源充足也可以挂载在多个串口上
RTU模式通过两帧数据的时间间隔,区分前后两帧数据,如果串口数据间隔大于3.5个字节,那么就认为一帧数据结束了,在9600bps/s波特率下,传输3.5个字节时间大概为4ms;ASCII模式读回车换行就行了
如果要读取传感器状态、数据,都需要发送请求帧
数据需要CRC校验
具体指令规则需查看传感器指令文档
2、 根据传感器指令文档编程
(1)打开传感器开关
void open_sensor(){
//控制电源开关的引脚拉高
}
(2)发送读取命令
void start_read(){
uint8_t TxData[10]= “010300000001840A”;
HAL_UART_Transmit(&huart3,TxData,10,0xffff);
HAL_Delay(100);
}
(3)读取数据
在串口接收中断中接收数据,如果下一个串口数据在4ms之内到来,那么重新计时,定时器中断不会生效;如果没来,则认为接收完一帧数据,程序会进入定时器中断,这个很关键
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart-》Instance == USART3){
HAL_TIM_Base_Stop_IT(&htim5);
HAL_UART_Receive_IT(&huart3, &uart3Data, 1);
uart3WriteByte(uart3Data);
HAL_TIM_Base_Start_IT(&htim5);//开始计时4ms,即modbus设备在9600波特率下传输一帧数据的时间间隔
uart3DataFlg = 1;
}
}
在定时器中断中进行处理数据
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&htim5))
{
//TIM_ClearITPendingBit(TIM5,TIM_IT_Update); //标准库需要清除TIMx更新中断标志,HAL库不需要,直接写业务逻辑就行
HAL_TIM_Base_Stop_IT(&htim5);
Modbus_Work();//数据处理函数
Uart3BufClear();
RS485_RX_CNT++;
}
}
(4)数据CRC校验
int16_t CRC_16( int8_t *vptr, int8_t len)
{
uint16_t MODBUSCRC = 0xffff;
uint16_t POLYNOMIAL = 0xa001;
uint8_t i, j;
for (i = 0; i 《 len; i++)
{
MODBUSCRC ^= vptr[i] ;
for (j = 0; j 《 8; j++)
{
if ((MODBUSCRC & 0x0001) != 0)
{
MODBUSCRC 》》= 1;
MODBUSCRC ^= POLYNOMIAL;
}
else
{
MODBUSCRC 》》= 1;
}
}
}
return MODBUSCRC;
}
CRC原理就不啰嗦了
不同种类的CRC校验的多项式并不统一,这里是0xA001,文档中会说明
(5)数据解析
int Modbus_Work(void)
{
double depth;
uint16_t depth_high;
uint16_t depth_low;
int len = strlen((char*)(sensor485DataBuffer+1));
if(sensor485DataBuffer[1] == 0x01)//从机地址正确则进行换算
{
if((CRC_16((int8_t *)(sensor485DataBuffer+1),len))==0x0000){//CRC校验
depth_high = sensor485DataBuffer[3];
depth_low = sensor485DataBuffer[4];
depth = (double)((depth_high 《《 8) + depth_low)/1000;
}
}memset(sensor485DataBuffer,0,len+1);
return depth;//这就是水深值了
}
四、注意事项
1、RS485通信,一定要A接A,B接B,不是反接。
2、采集线过长,要考虑使用屏蔽线。

 举报
举报




