编程软件
如下图,使用STEP 7 MicroWIN SMART,稳定支持win7 64和32位操作系统,安装过程有时安装不上,有时卸载后,也安装不上或者其他无法安装的情况如果出现,建议更换版本,可以使用V2.3的版本;
打开软件如下图
我们先看最左边的,如下图
1、项目1是本次编写程序的项目名称,当然可以随意修改
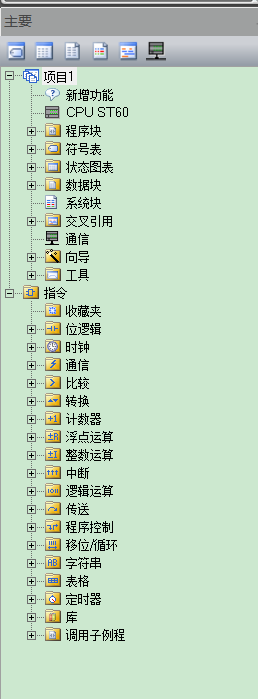
2、CPU ST60 本次项目所使用的CPU型号,鼠标双击CPU ST60会弹出如下图,系统块设置对话框
在系统块对话框中,我们可以设置或修改CPU的版本、型号以及当CPU添加了扩展模块后,我们也需要在这里进行相应的添加;

需要修改哪里,只需要鼠标点击即可进行修改;

大部分时候,PLC都会配有一个触摸屏,如果触摸屏和PLC使用的是RS485通信,只需要设置RS485端口的地址和波特率即可,波特率需要和触摸屏上设置的一样;
如果使用的是以太网口通信,那么我们需要设置一个固定的IP地址,波段和HMI上的一致即可,例如HMI上设置的是192.168.2.10,那么PLC设置可以是192.168.2.11,不能是192.178.2.11,前三位我们要保证一样,最后以为不能一样;

数字量输入设置,如下图
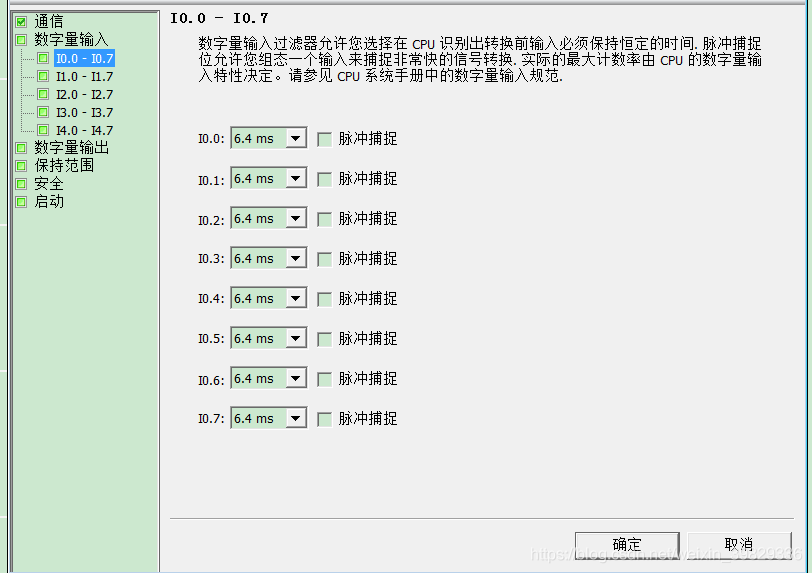
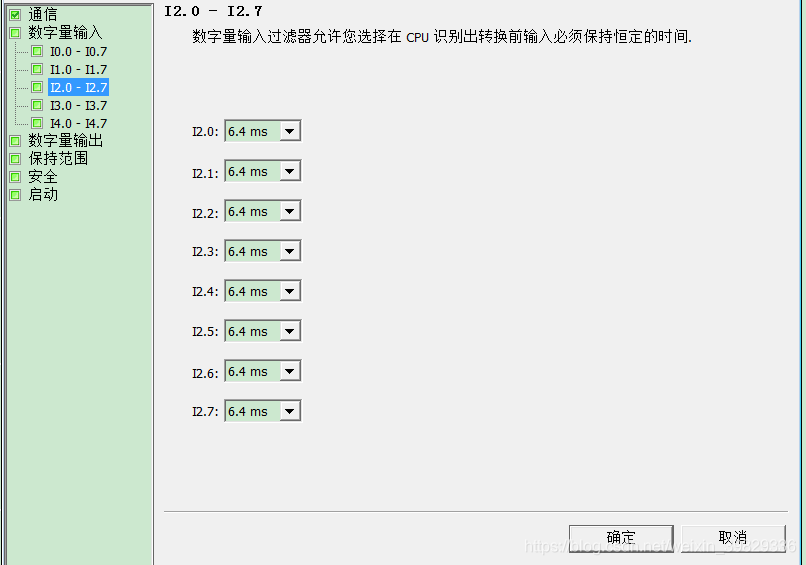
之前我们提到过,不同型号的PLC具有不同多个高速计数器,我们在数字量输入中,可以看到,带有脉冲捕捉功能的输入点就是可以设置成为脉冲捕捉的,具体捕捉的时间,我们可以通过通过设置决定;
另外,这里的数字量输入设置还有另外一个功能,就是我们可以通过设置时间,来过滤干扰信号,标准的输入都是6.4ms,我们可以设置成12.8ms来过滤不稳定的输入信号;
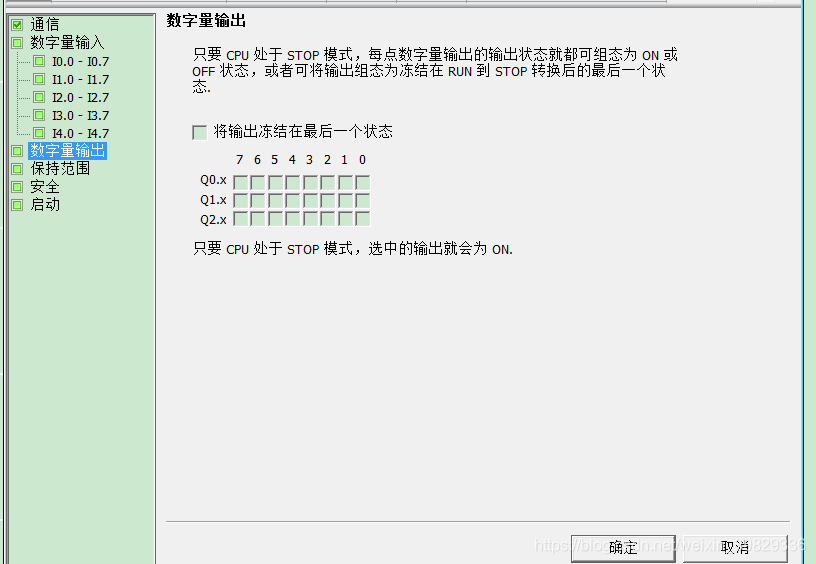
一般情况下,CPU都是处于RUN模式,当我们下载程序时,CPU会处于STOP模式,如果没有设置冻结,在RUN到STOP模式转换后,所有输出都会变成OFF,也就是没有任何输出;通过设数字量输出,我们可以冻结输出点,即使CPU从RUN模式到STOP模式,输出点也会保持最后的状态,不发生变化,例如Q0.0在RUN模式下时ON的,那么当CPU从RUN到STOP模式后,Q0.0还是ON的,不发生变化;
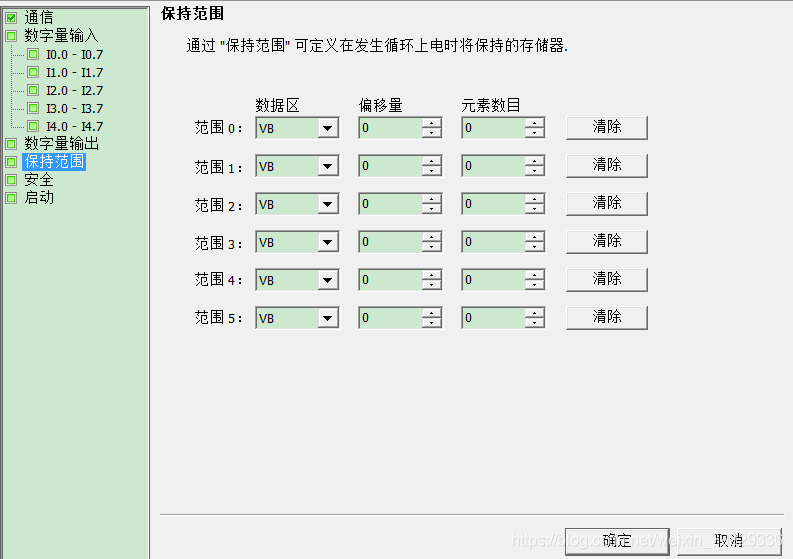
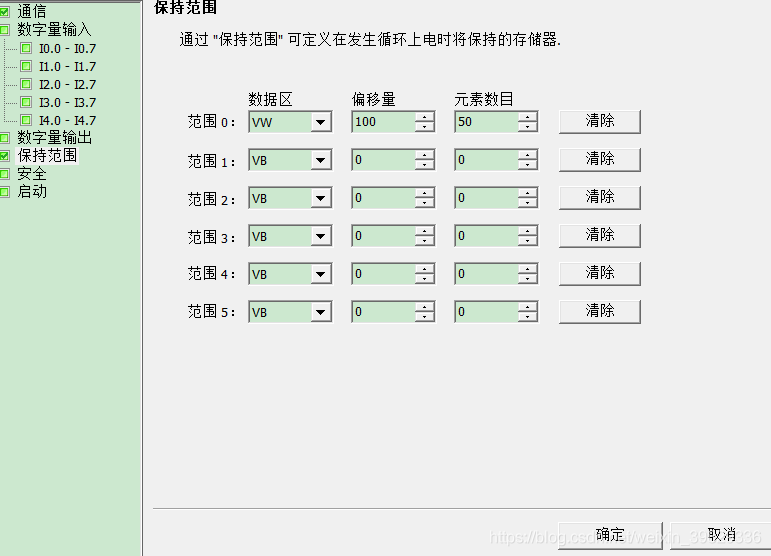
CPU和HMI通信后,HMI会设置很多的参数,例如电机运行时间、上升时间、加热时间等,这些参数在写入PLC后,即使PLC断电也是不会发生变化的,但这是有前提的,当我们不设置保持时,在断电后,所有参数都会清零。
所以我们在编程时,HMI和PLC之间的参数应该具有规律性,这样就可以很方便的通过保持范围进行设置,例如HMI和PLC通信参数的范围是VW100到VW200,那么设置如下图
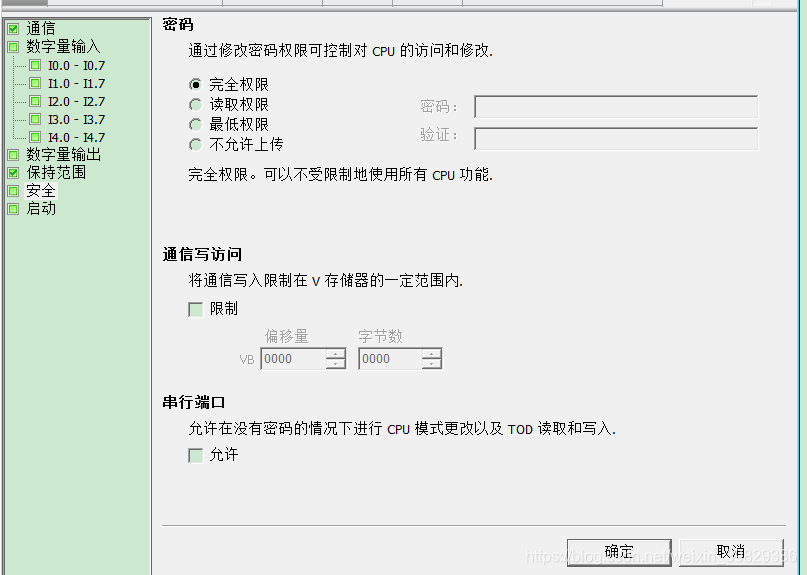
安全设置,主要是设置权限保护,在写完程序,下载到PLC中后,如果不能输入相应正确的密码,那么是无法查看或上载程序的
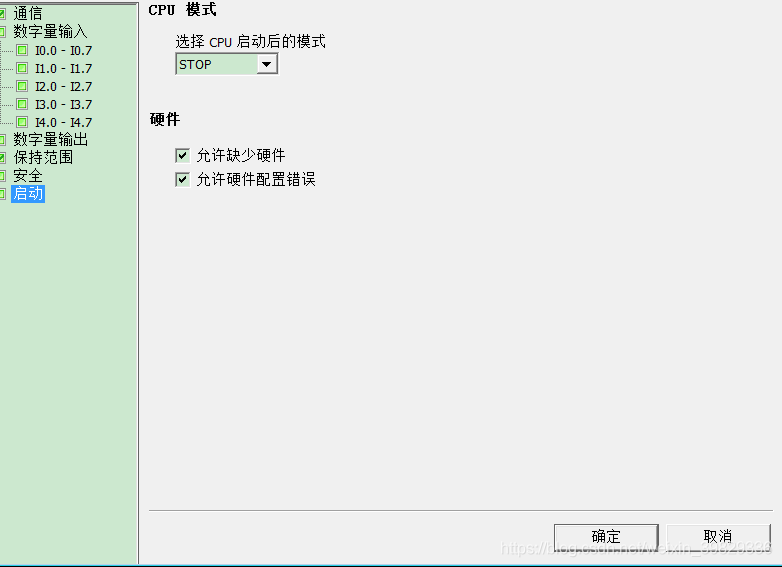
CPU的模式设置很重要,这里决定了,在上电后,PLC是RUN模式还是STOP模式,如果是STOP模式,在上电后需要人为运行PLC,如果是处于RUN模式,那么上电后,PLC就处于运行状态,大部分情况下,我们需要把CPU启动后的模式改成RUN模式;
硬件这里很明显,是决定PLC能否正常运行的忽略项,是否忽略各种错误,如果不忽略,那么一旦有配置错误或者硬件错误,PLC就会报错;
总结:
在编写项目前,我们需要在系统块中设置如下几项
1、设置项目名称,此项不是必须的,可以默认;
2、设置PLC的型号以及扩展模块,此项是必须的
3、设置通信,如果有触摸屏,那么此项必须设置
4、设置保持范围,此项必须设置,程序少不了参数,想要在断电后保持这些参数,就必须设置保持范围
5、安全,此项不是必须项,如果需要保护程序的安全,则设置
6、启动,大部分情况下,此项是必须项,设置PLC的启动为RUN,是否忽略硬件缺少,根据具体情况。
编程软件
如下图,使用STEP 7 MicroWIN SMART,稳定支持win7 64和32位操作系统,安装过程有时安装不上,有时卸载后,也安装不上或者其他无法安装的情况如果出现,建议更换版本,可以使用V2.3的版本;
打开软件如下图
我们先看最左边的,如下图
1、项目1是本次编写程序的项目名称,当然可以随意修改
2、CPU ST60 本次项目所使用的CPU型号,鼠标双击CPU ST60会弹出如下图,系统块设置对话框
在系统块对话框中,我们可以设置或修改CPU的版本、型号以及当CPU添加了扩展模块后,我们也需要在这里进行相应的添加;
需要修改哪里,只需要鼠标点击即可进行修改;
大部分时候,PLC都会配有一个触摸屏,如果触摸屏和PLC使用的是RS485通信,只需要设置RS485端口的地址和波特率即可,波特率需要和触摸屏上设置的一样;
如果使用的是以太网口通信,那么我们需要设置一个固定的IP地址,波段和HMI上的一致即可,例如HMI上设置的是192.168.2.10,那么PLC设置可以是192.168.2.11,不能是192.178.2.11,前三位我们要保证一样,最后以为不能一样;
数字量输入设置,如下图
之前我们提到过,不同型号的PLC具有不同多个高速计数器,我们在数字量输入中,可以看到,带有脉冲捕捉功能的输入点就是可以设置成为脉冲捕捉的,具体捕捉的时间,我们可以通过通过设置决定;
另外,这里的数字量输入设置还有另外一个功能,就是我们可以通过设置时间,来过滤干扰信号,标准的输入都是6.4ms,我们可以设置成12.8ms来过滤不稳定的输入信号;
一般情况下,CPU都是处于RUN模式,当我们下载程序时,CPU会处于STOP模式,如果没有设置冻结,在RUN到STOP模式转换后,所有输出都会变成OFF,也就是没有任何输出;通过设数字量输出,我们可以冻结输出点,即使CPU从RUN模式到STOP模式,输出点也会保持最后的状态,不发生变化,例如Q0.0在RUN模式下时ON的,那么当CPU从RUN到STOP模式后,Q0.0还是ON的,不发生变化;
CPU和HMI通信后,HMI会设置很多的参数,例如电机运行时间、上升时间、加热时间等,这些参数在写入PLC后,即使PLC断电也是不会发生变化的,但这是有前提的,当我们不设置保持时,在断电后,所有参数都会清零。
所以我们在编程时,HMI和PLC之间的参数应该具有规律性,这样就可以很方便的通过保持范围进行设置,例如HMI和PLC通信参数的范围是VW100到VW200,那么设置如下图
安全设置,主要是设置权限保护,在写完程序,下载到PLC中后,如果不能输入相应正确的密码,那么是无法查看或上载程序的
CPU的模式设置很重要,这里决定了,在上电后,PLC是RUN模式还是STOP模式,如果是STOP模式,在上电后需要人为运行PLC,如果是处于RUN模式,那么上电后,PLC就处于运行状态,大部分情况下,我们需要把CPU启动后的模式改成RUN模式;
硬件这里很明显,是决定PLC能否正常运行的忽略项,是否忽略各种错误,如果不忽略,那么一旦有配置错误或者硬件错误,PLC就会报错;
总结:
在编写项目前,我们需要在系统块中设置如下几项
1、设置项目名称,此项不是必须的,可以默认;
2、设置PLC的型号以及扩展模块,此项是必须的
3、设置通信,如果有触摸屏,那么此项必须设置
4、设置保持范围,此项必须设置,程序少不了参数,想要在断电后保持这些参数,就必须设置保持范围
5、安全,此项不是必须项,如果需要保护程序的安全,则设置
6、启动,大部分情况下,此项是必须项,设置PLC的启动为RUN,是否忽略硬件缺少,根据具体情况。

 举报
举报




