无位置传感器的启动一般采用传统的“三段式”启动,即预定位、外同步加速、切换闭环。然后传统启动方法存在的最明显的弊端就是需要保证启动给定的占空比和换相之间的延时时间需要反复调试,找到最佳的配合组合,才可能有较高的启动成功率,但也不能保证每次都启动成功,而且在负载变化或者电源不是很稳定的时候,很容易造成启动失败。
我自己最近在调试一款台锯的时候,尤其感到传统“三段式”启动的弊端,经常出现启动抖动,齿轮摩擦的声音非常大,因此我采用了一种经过改进的准闭环启动,当然我也是参考的一些前辈的方案。
启动框图如下:
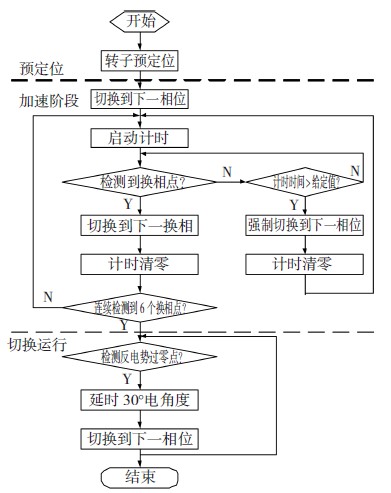
在这个基础上,一定需要加入两次换相间隔时间的滤波,简单的说,就是说如果你设定换相的周期是60ms,那么当换相(无论是强制换相还是检测反电势后换相)后5ms就再次检测到反电势,此时这个换相脉冲就应该舍去,因为5ms相差60ms太多了。当然这个滤波的时间可以自己调试。
经过我多次调试时间,台锯启动非常好,下面贴上启动时候的状态。
无位置传感器的启动一般采用传统的“三段式”启动,即预定位、外同步加速、切换闭环。然后传统启动方法存在的最明显的弊端就是需要保证启动给定的占空比和换相之间的延时时间需要反复调试,找到最佳的配合组合,才可能有较高的启动成功率,但也不能保证每次都启动成功,而且在负载变化或者电源不是很稳定的时候,很容易造成启动失败。
我自己最近在调试一款台锯的时候,尤其感到传统“三段式”启动的弊端,经常出现启动抖动,齿轮摩擦的声音非常大,因此我采用了一种经过改进的准闭环启动,当然我也是参考的一些前辈的方案。
启动框图如下:
在这个基础上,一定需要加入两次换相间隔时间的滤波,简单的说,就是说如果你设定换相的周期是60ms,那么当换相(无论是强制换相还是检测反电势后换相)后5ms就再次检测到反电势,此时这个换相脉冲就应该舍去,因为5ms相差60ms太多了。当然这个滤波的时间可以自己调试。
经过我多次调试时间,台锯启动非常好,下面贴上启动时候的状态。

 举报
举报




