打开Twincat界面,三个主要的项目
1、Twincat项目
2、示波器项目
3、HMI(人机交互)项目
Twincat是一款模块化的工具,每一个项目都可以作为主要项目的一个模块,同时也可以在项目中加入自己的模块。
模块中,Twincat Project是最主要的模块
创建完成后,会创建一个solution作为主要的项目,而在这个项目中,可以添加其他的模块。例如这里的measurement组件能够显示数据,观察不同变量的曲线变化。
创建完成后可以看到会出现一个新的工程,虽然是额外的但是其实是在一个项目下。能够很方便的进行交互和数据通信。

System 主要介绍系统配置
Motion 路径规划以及运动功能的实现
PLC
SAFETY 安全逻辑以及安全模块的参数配置
C++ 自定义C++库
IO IO设备
License 系统授权
RealTime 实时运行的Task配置
Task 任务列表
TcCom Object 加载C++/Matlab/simulink等实现的算法模块。同时也可以加载一些倍福自己实现的模块。
Task中的任务可以自定义创建,而每一个任务的执行流程则在Realtime中进行设置,如下图6区域。
Realtime设置区域中:
1、表示当前设备cpu的内核数
2、实时占用的内核
3、响应时间
4、内核占用的比例
5、
6、指定任务的优先级,可以在Priorities选项卡中进行手动调整。
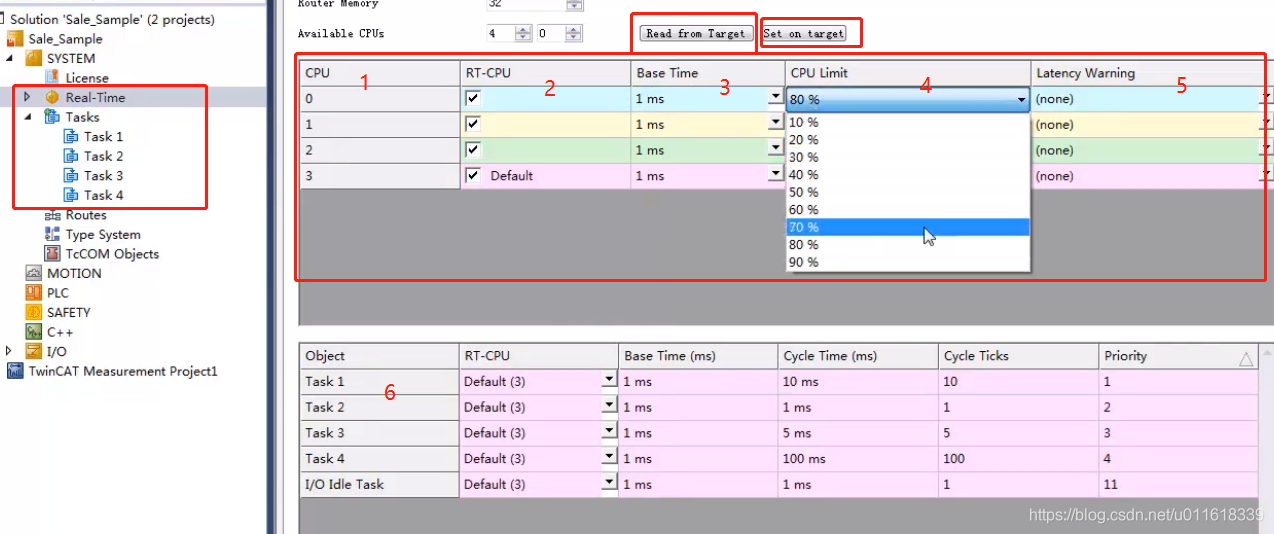
设置占用CPU可以设置独占的CPU,使用set on target可以设置独占的内核。

Motion
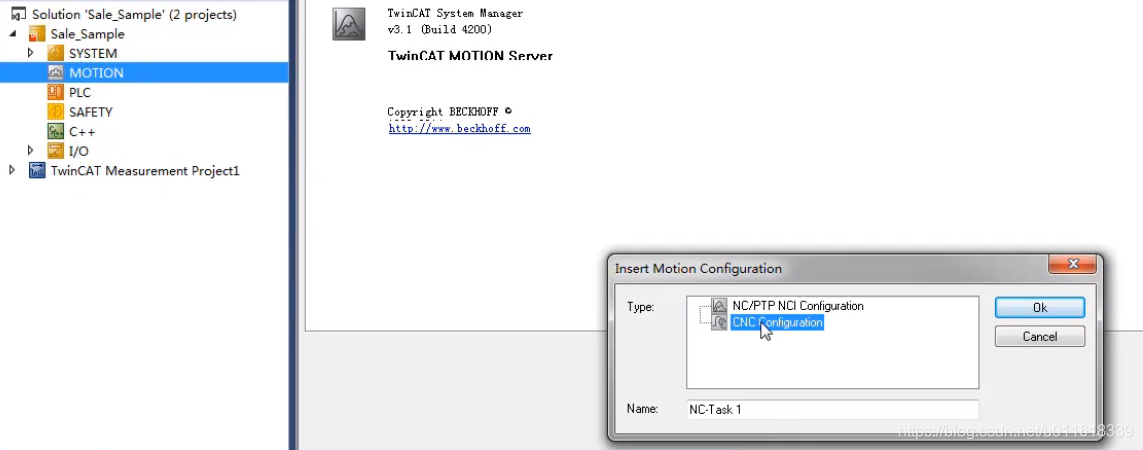
可以创建NC/PTP,CNC等方式的配置,这些分别是不同的机器人控制方式。
PLC
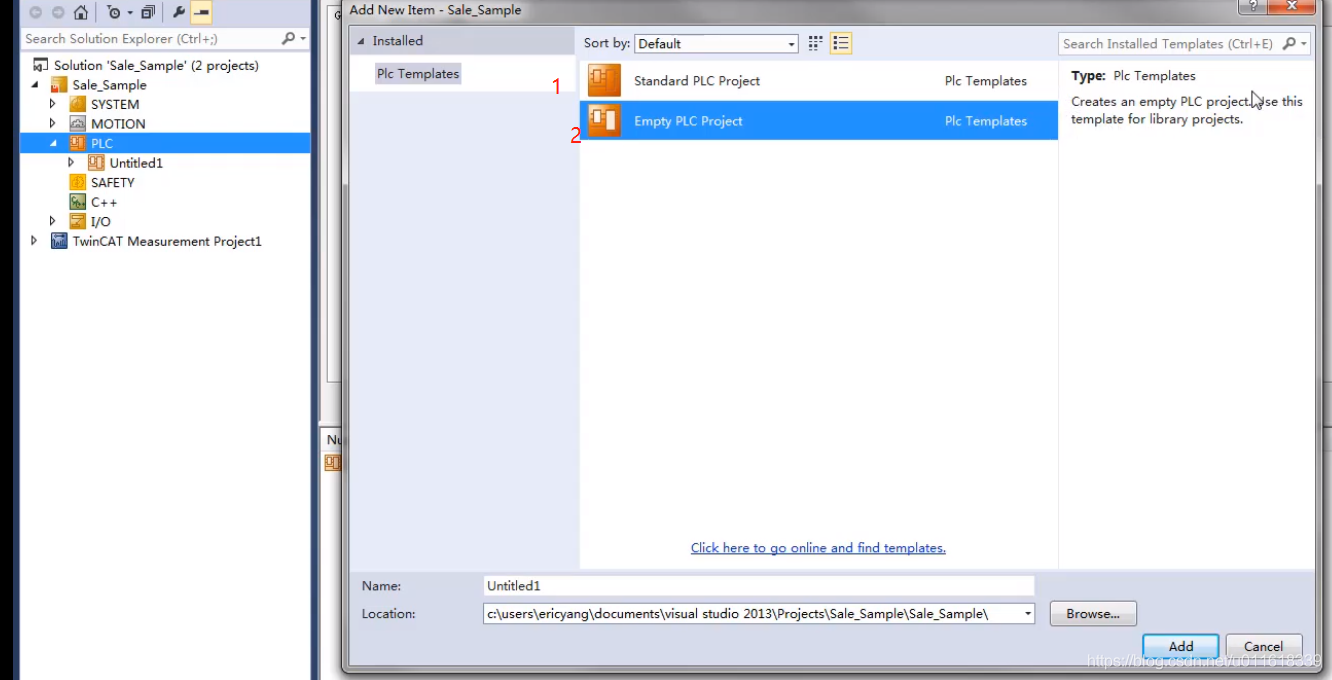
PLC可以进行实际的编程控制机械。而在创建的时候可以有两个选项
Standard PLC 标准PLC,一个PLC的完整工程
Empty PLC一个PLC的库
一个完整的PLC工程中包括:
Reference 额外的库应用
DUTs 创建自定义的数据结构
GVLs 全局变量
POUs 程序编写
VISUs 人机界面,可以直接在工程中添加人机交互界面
DUT

结构体、枚举、别名、联合体
POU
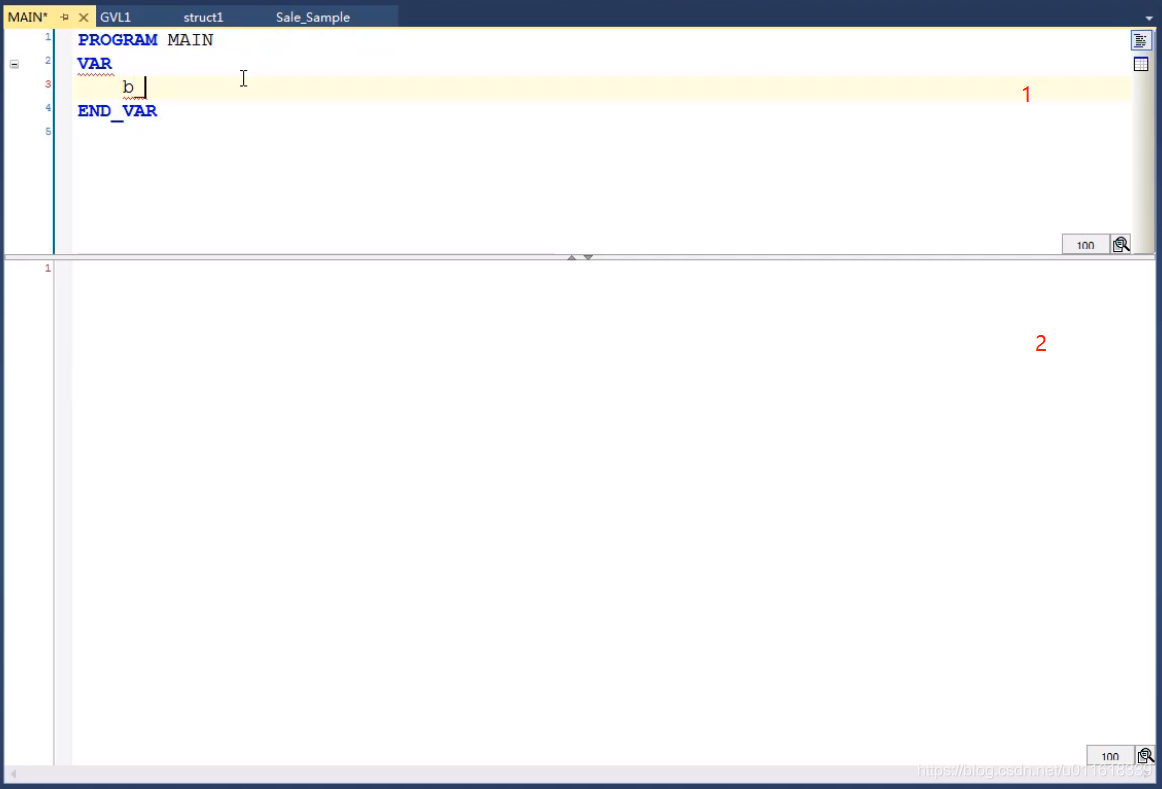
1为变量声明区
2为逻辑编写区
逻辑可以使用多种语言编写,例如梯形图、逻辑图等等
VIUs
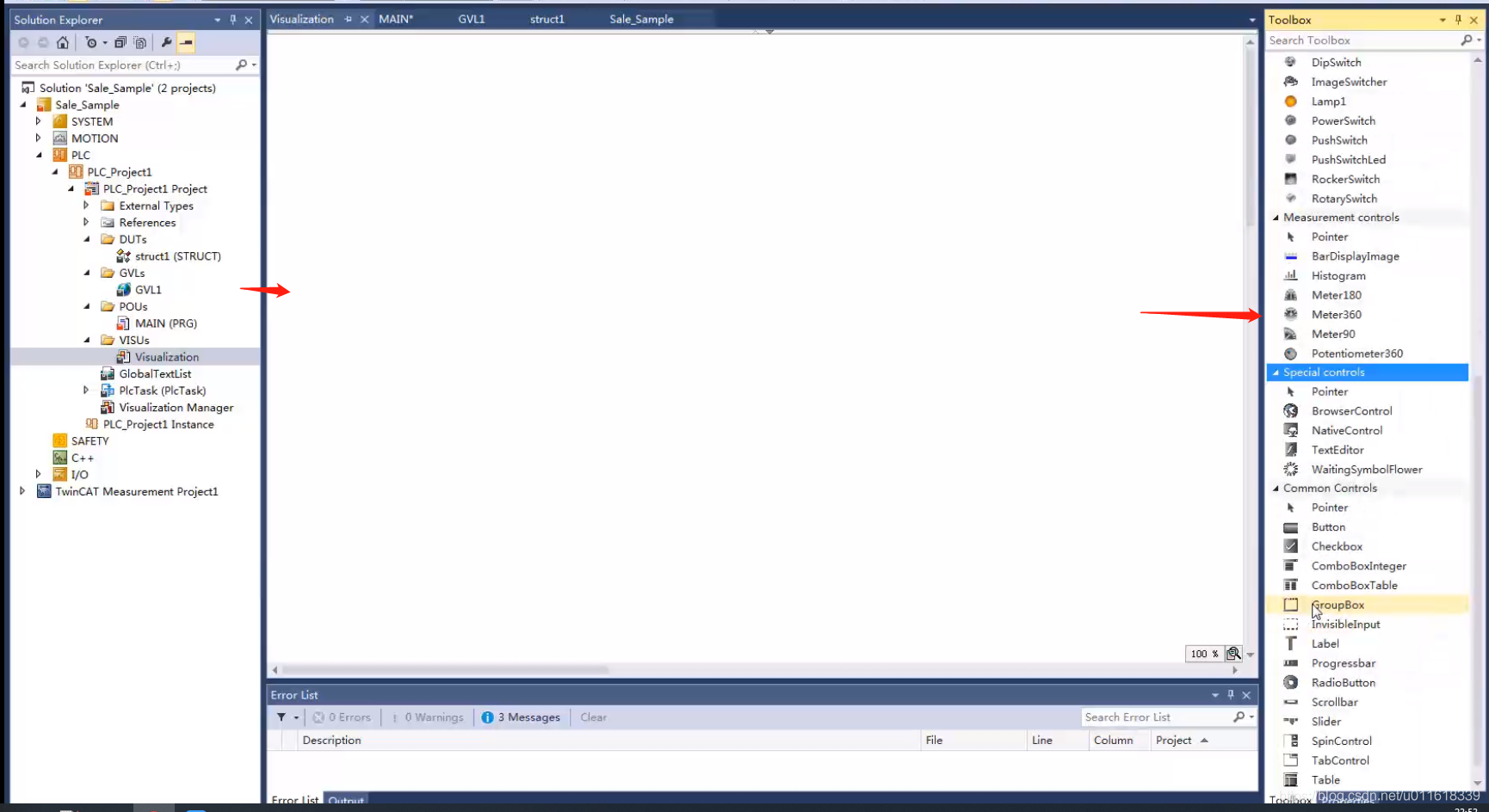
在人机交互界面中,点击创建完成后,可以在右边看到人机交互的控件。中间为界面。
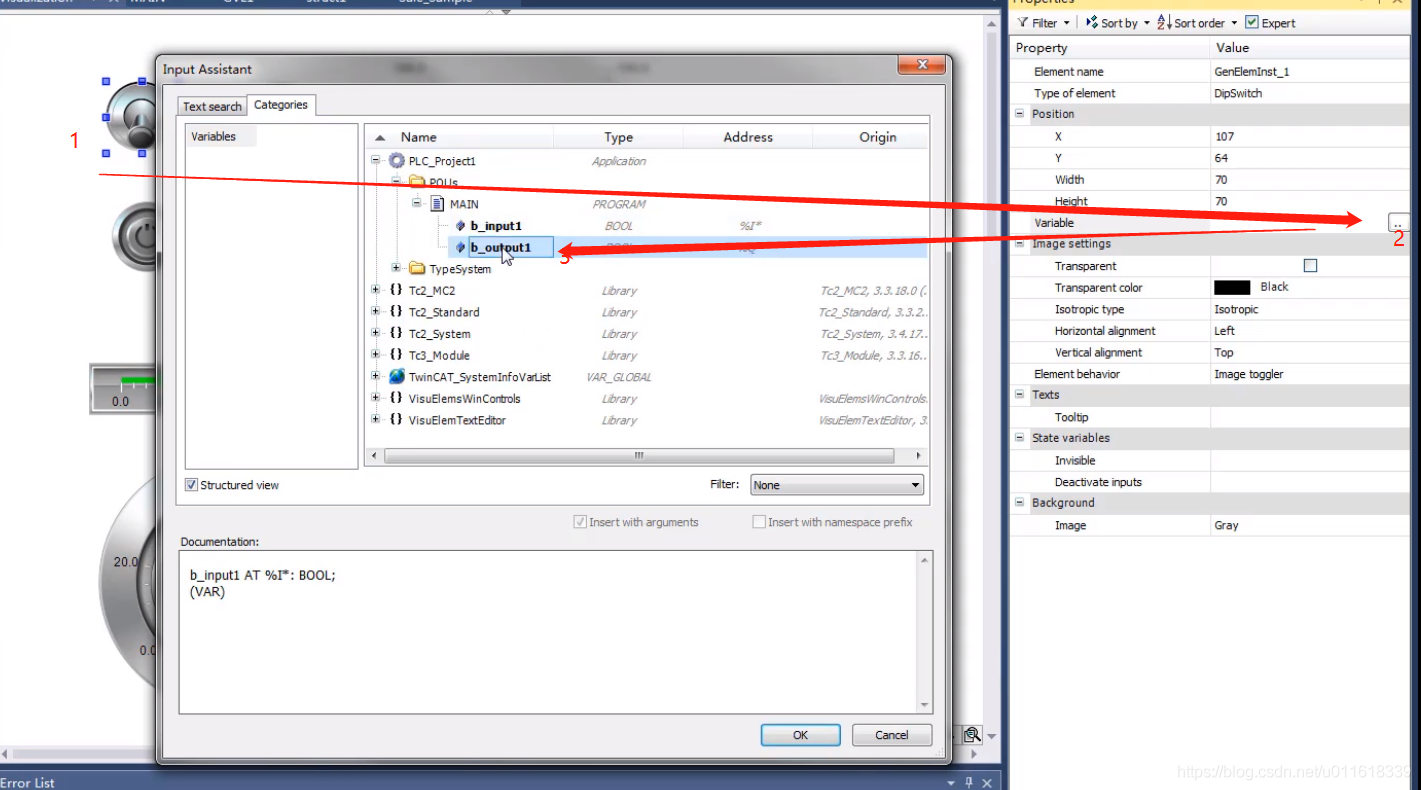
拖拽完成界面设计之后,可以点击组件进行变量的绑定。
变量链接
要得到这些能够链接的变量,首先需要点击POUs界面,然后右键build。在POUs所定义的变量还能与Reference中的库里的变量进行链接。点击变量,右键选择add link。然后在弹出框中选择对应的属性。
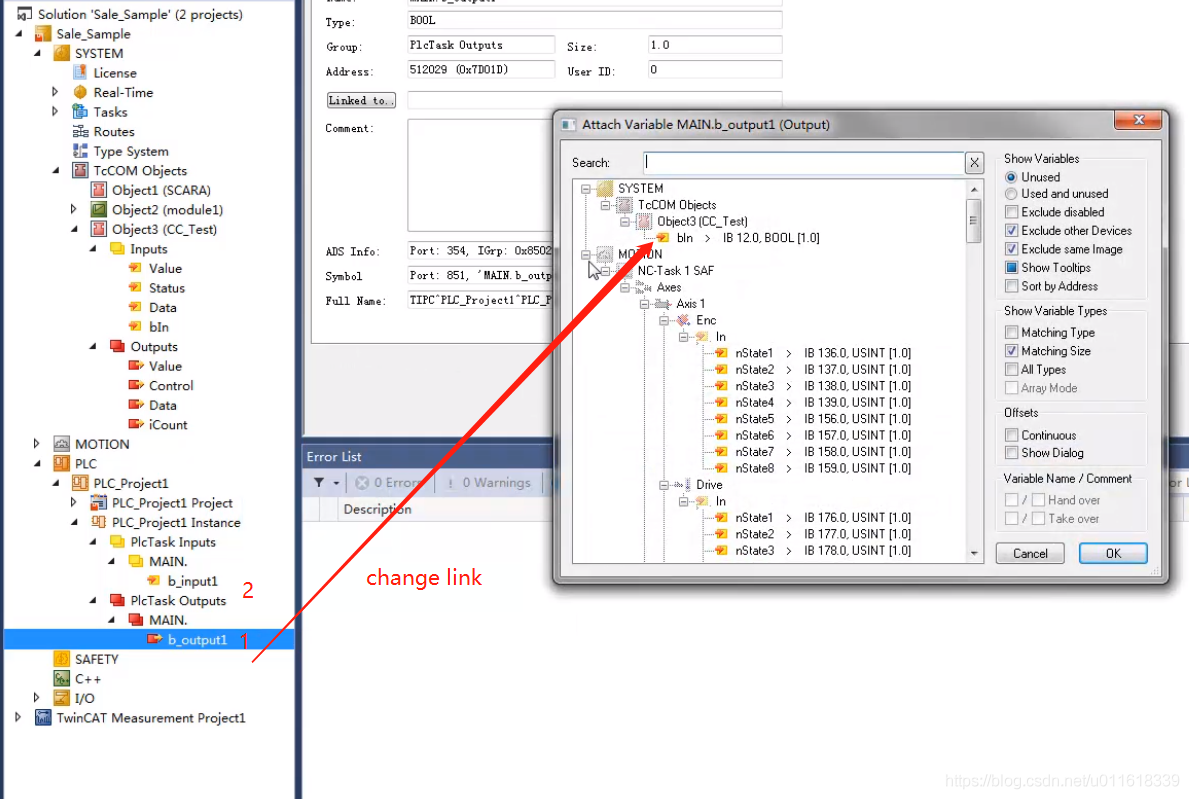
完成变量映射。这一步可以解决PLC与大多数硬件之间的通信。
C++
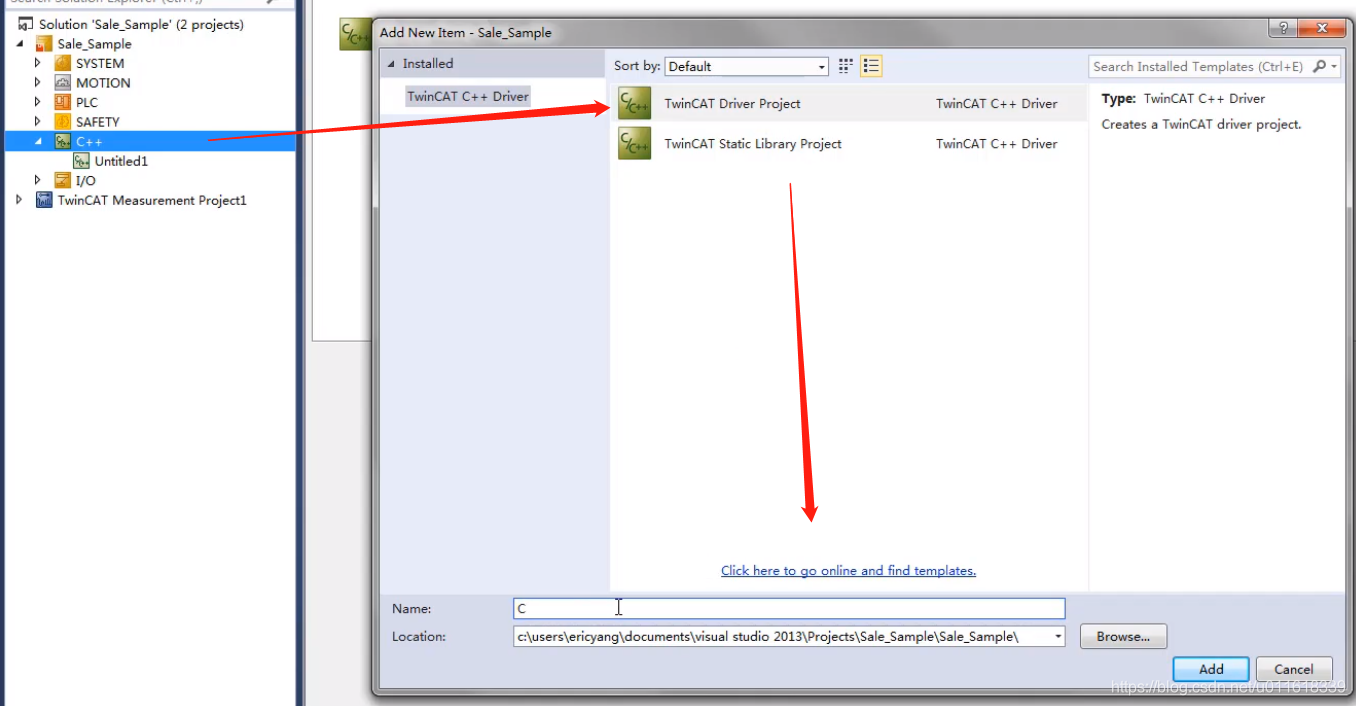
如果安装是完整的VS,那么这里可以创建C++项目。创建的C++项目可以有两种类型:
1、C++项目
2、C++库项目
C++库中的变量也同样能够与其他模块进行链接,只需要右键add module然后在模块结构下面找到变量,与POUs中的变量操作类似。
打开Twincat界面,三个主要的项目
1、Twincat项目
2、示波器项目
3、HMI(人机交互)项目
Twincat是一款模块化的工具,每一个项目都可以作为主要项目的一个模块,同时也可以在项目中加入自己的模块。
模块中,Twincat Project是最主要的模块
创建完成后,会创建一个solution作为主要的项目,而在这个项目中,可以添加其他的模块。例如这里的measurement组件能够显示数据,观察不同变量的曲线变化。
创建完成后可以看到会出现一个新的工程,虽然是额外的但是其实是在一个项目下。能够很方便的进行交互和数据通信。
System 主要介绍系统配置
Motion 路径规划以及运动功能的实现
PLC
SAFETY 安全逻辑以及安全模块的参数配置
C++ 自定义C++库
IO IO设备
License 系统授权
RealTime 实时运行的Task配置
Task 任务列表
TcCom Object 加载C++/Matlab/simulink等实现的算法模块。同时也可以加载一些倍福自己实现的模块。
Task中的任务可以自定义创建,而每一个任务的执行流程则在Realtime中进行设置,如下图6区域。
Realtime设置区域中:
1、表示当前设备cpu的内核数
2、实时占用的内核
3、响应时间
4、内核占用的比例
5、
6、指定任务的优先级,可以在Priorities选项卡中进行手动调整。
设置占用CPU可以设置独占的CPU,使用set on target可以设置独占的内核。
Motion
可以创建NC/PTP,CNC等方式的配置,这些分别是不同的机器人控制方式。
PLC
PLC可以进行实际的编程控制机械。而在创建的时候可以有两个选项
Standard PLC 标准PLC,一个PLC的完整工程
Empty PLC一个PLC的库
一个完整的PLC工程中包括:
Reference 额外的库应用
DUTs 创建自定义的数据结构
GVLs 全局变量
POUs 程序编写
VISUs 人机界面,可以直接在工程中添加人机交互界面
DUT
结构体、枚举、别名、联合体
POU
1为变量声明区
2为逻辑编写区
逻辑可以使用多种语言编写,例如梯形图、逻辑图等等
VIUs
在人机交互界面中,点击创建完成后,可以在右边看到人机交互的控件。中间为界面。
拖拽完成界面设计之后,可以点击组件进行变量的绑定。
变量链接
要得到这些能够链接的变量,首先需要点击POUs界面,然后右键build。在POUs所定义的变量还能与Reference中的库里的变量进行链接。点击变量,右键选择add link。然后在弹出框中选择对应的属性。
完成变量映射。这一步可以解决PLC与大多数硬件之间的通信。
C++
如果安装是完整的VS,那么这里可以创建C++项目。创建的C++项目可以有两种类型:
1、C++项目
2、C++库项目
C++库中的变量也同样能够与其他模块进行链接,只需要右键add module然后在模块结构下面找到变量,与POUs中的变量操作类似。

 举报
举报




