黄工无刷电机学习
登录
直播中
一曲作罢
10年用户
979经验值
擅长:可编程逻辑 电源/新能源 MEMS/传感技术
私信
关注
[问答]
如何使用树莓派4b去控制直流电机
开启该帖子的消息推送
树莓派
直流电机
SG90
树莓派4b的针脚有哪些?
SG90舵机与树莓派4b是如何进行接线的?
回帖
(1)
陈洁
2021-8-13 15:52:54
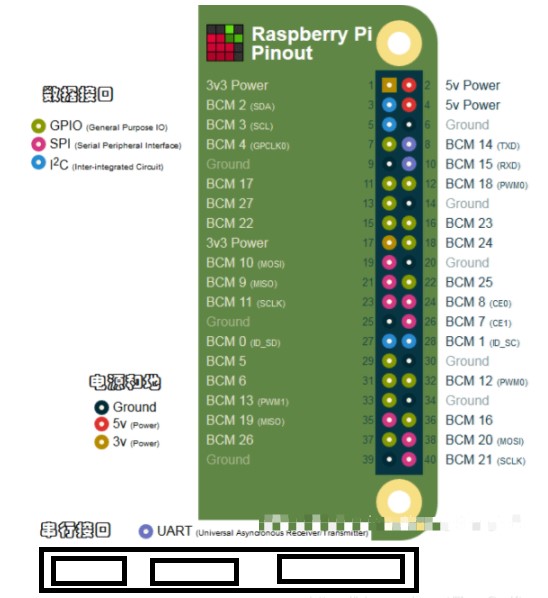
树莓派针脚图
我所使用的是树莓派4b,它的针脚图如下图所示:
其中,图像底端的黑色框框表示网线接口和u***接口。
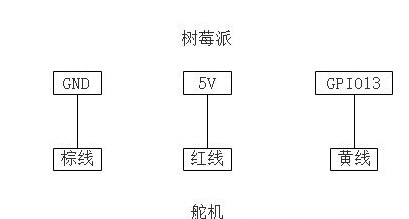
舵机接线图
我所使用的舵机是经典的SG90舵机,它的接线图如下图所示:
其中,GPIO13对应于树莓派4b针脚图中的BCM 13针脚
控制舵机
安装GPIO库
我所使用的python版本为pyhton3.7,因此,可以通过以下命令安装GPIO库:
pip3 install rpi.gpio 如果大家没有安装pip,可以通过以下命令进行pip的安装
sudo apt-get install python-pip
使用GPIO库控制舵机
基础的使用方法如下所示:
# -*- coding:utf-8 -*-import RPi.GPIO as GPIOimport time# 将舵机角度转换为信号占空比,0-180度对应2.5%-12.5%def tonum(num): fm = 10.0/180.0 num = num*fm + 2.5 num = int(num*10)/10.0 return num# 设置模式GPIO.setmode(GPIO.BCM)# 设置几号引脚为输出引脚GPIO.setup(13, GPIO.OUT)test = {}# PWM波的采样速度p13 = GPIO.PWM(13, 50)# 将舵机的角度归零p13.start(tonum(0))# 测试使用list来包装引脚test[13] = p13while 1: num = int(input(‘num’)) # 如果输入的角度值不在舵机可转动范围内 if num 《 0 or num 》 180: test[13].stop() exit() else: # 根据输入的角度来换算成信号并进行转动 test[13].ChangeDutyCycle(tonum(num)) # 以下两句话用于放置舵机在上电保持角度是出现抖动 time.sleep(1) test[13].ChangeDutyCycle(0)
树莓派针脚图
我所使用的是树莓派4b,它的针脚图如下图所示:
其中,图像底端的黑色框框表示网线接口和u***接口。
舵机接线图
我所使用的舵机是经典的SG90舵机,它的接线图如下图所示:
其中,GPIO13对应于树莓派4b针脚图中的BCM 13针脚
控制舵机
安装GPIO库
我所使用的python版本为pyhton3.7,因此,可以通过以下命令安装GPIO库:
pip3 install rpi.gpio 如果大家没有安装pip,可以通过以下命令进行pip的安装
sudo apt-get install python-pip
使用GPIO库控制舵机
基础的使用方法如下所示:
# -*- coding:utf-8 -*-import RPi.GPIO as GPIOimport time# 将舵机角度转换为信号占空比,0-180度对应2.5%-12.5%def tonum(num): fm = 10.0/180.0 num = num*fm + 2.5 num = int(num*10)/10.0 return num# 设置模式GPIO.setmode(GPIO.BCM)# 设置几号引脚为输出引脚GPIO.setup(13, GPIO.OUT)test = {}# PWM波的采样速度p13 = GPIO.PWM(13, 50)# 将舵机的角度归零p13.start(tonum(0))# 测试使用list来包装引脚test[13] = p13while 1: num = int(input(‘num’)) # 如果输入的角度值不在舵机可转动范围内 if num 《 0 or num 》 180: test[13].stop() exit() else: # 根据输入的角度来换算成信号并进行转动 test[13].ChangeDutyCycle(tonum(num)) # 以下两句话用于放置舵机在上电保持角度是出现抖动 time.sleep(1) test[13].ChangeDutyCycle(0)
举报
更多回帖
rotate(-90deg);
回复
相关问答
树莓派
直流电机
SG90
请问
树莓
派
如何
控制
直流电机
?
2021-08-30
1896
请问怎样利用
树莓
派
4B
去
控制
步进
电机
?
2021-06-30
2291
PWM是怎样
去
控制
stm32
直流电机
的
2021-08-23
1881
如何对
直流电机
进行速度
控制
2021-09-08
1651
怎样通过霍尔传感器
去
控制
无刷
直流电机
呢
2021-09-17
3918
怎样
去
控制
直流电机
的实际输出电压
2021-08-09
2213
怎样
去
控制
基于两路继电器
直流电机
的正反转和转速呢
2021-09-16
1794
请问怎样
去
搭建一种无刷
直流电机
的速度
控制
模型
2021-08-13
1942
如何
去
实现对无刷
直流电机
的转速和方向的
控制
?
2021-07-23
2744
请问PWM如何
控制
直流电机
转速?
2021-10-19
2551
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分


 举报
举报



