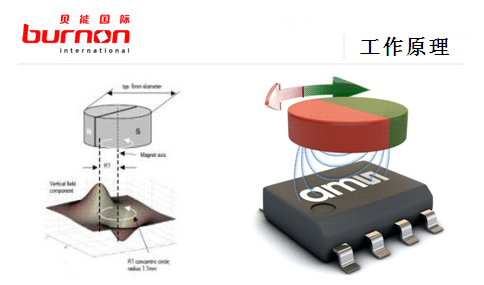
磁编码器工作原理
两极磁铁N极和S极分别产生一正一负方向的磁场,磁编码器可感应此磁铁所产生的磁场。在磁铁转动的过程中,磁场会在磁编码器上任一测量位置产生一个交变正弦波的磁场强度变化,这个变化会在磁铁旋转一圈中不停地循环,在0-360°这一个周期中与磁场强度呈对应关系,磁编码器根据感应到的磁场强度识别出磁铁在某一时刻的绝对位置,位置信息经过编码后输出。
DEMO board演示
贝能国际现推出一款AS5047D芯片应用演示板和一款电机应用演示板。该芯片应用演示板使用旋钮模拟电机转轴转动变化,通过读取磁编码器数据将电机转轴的绝对角度以及转速显示在LCD上,实现了对磁编码器AS5047D的功能应用演示。
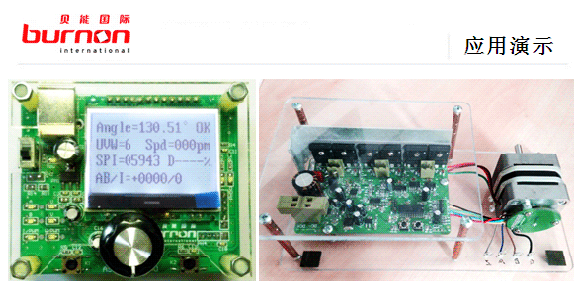
电机应用演示板使用FOC方式驱动BLDC,利用AS5047D输出的霍尔信号达到控制电机转动以及速度闭环效果;演示驱动BLDC的典型应用。
AS5047D输出信号类型
- SPI输出14-bit信号(电机位置)
- 12-bit可变占空比PWM输出(电机位置)
- UVW信号输出,1-7对极可选
- ABI信号输出,8-512线可选
AS5047D芯片特点
- 特有的DAEC?动态角误差补偿,从硬件上解决系统传输延迟
- 仅一片IC,可同时拥有霍尔信号以及正交编码信号等多种信号输出
- 测量精度高,可测量最小0.02°角度变化
- 超高转换线性度,转换快速准确
- 外置安装,无需改变电机结构
- 非专用传感器,可用于所有常规电机
- 温度适应性强,-40oC~+125oC范围可用
- 最高检测转速14,500rpm
- 电机零点位置以及用户设置可编程

磁编码器与霍尔传感器优势对比:

磁编码器与光电编码器优势对比:

应用场合
- 智能家居:门窗控制电机转角检测
- 机器人:机械臂角度控制
- 运动控制:自动机床定位及速度控制
- 电器:风扇、鼓风机控制等
磁编码器工作原理
两极磁铁N极和S极分别产生一正一负方向的磁场,磁编码器可感应此磁铁所产生的磁场。在磁铁转动的过程中,磁场会在磁编码器上任一测量位置产生一个交变正弦波的磁场强度变化,这个变化会在磁铁旋转一圈中不停地循环,在0-360°这一个周期中与磁场强度呈对应关系,磁编码器根据感应到的磁场强度识别出磁铁在某一时刻的绝对位置,位置信息经过编码后输出。
DEMO board演示
贝能国际现推出一款AS5047D芯片应用演示板和一款电机应用演示板。该芯片应用演示板使用旋钮模拟电机转轴转动变化,通过读取磁编码器数据将电机转轴的绝对角度以及转速显示在LCD上,实现了对磁编码器AS5047D的功能应用演示。
电机应用演示板使用FOC方式驱动BLDC,利用AS5047D输出的霍尔信号达到控制电机转动以及速度闭环效果;演示驱动BLDC的典型应用。
AS5047D输出信号类型
- SPI输出14-bit信号(电机位置)
- 12-bit可变占空比PWM输出(电机位置)
- UVW信号输出,1-7对极可选
- ABI信号输出,8-512线可选
AS5047D芯片特点
- 特有的DAEC?动态角误差补偿,从硬件上解决系统传输延迟
- 仅一片IC,可同时拥有霍尔信号以及正交编码信号等多种信号输出
- 测量精度高,可测量最小0.02°角度变化
- 超高转换线性度,转换快速准确
- 外置安装,无需改变电机结构
- 非专用传感器,可用于所有常规电机
- 温度适应性强,-40oC~+125oC范围可用
- 最高检测转速14,500rpm
- 电机零点位置以及用户设置可编程
磁编码器与霍尔传感器优势对比:
磁编码器与光电编码器优势对比:
应用场合
- 智能家居:门窗控制电机转角检测
- 机器人:机械臂角度控制
- 运动控制:自动机床定位及速度控制
- 电器:风扇、鼓风机控制等

 举报
举报




