
| 参数 [td]条件 [td]计算 [td]误差 [/tr] |
| 失调电压[td]0 V < VCM < 5 V [td] [td]300 µV[/tr] |
| 6.75 V < VDD < 15 V [/tr] |
| 失调电压漂移[td]0 V < VCM < 5 V [td]300 µV/°C × 110°C[td]341 µV[/tr] |
| 6.75 V < VDD < 15 V [/tr] |
| –40°C < T < +70°C [/tr] |
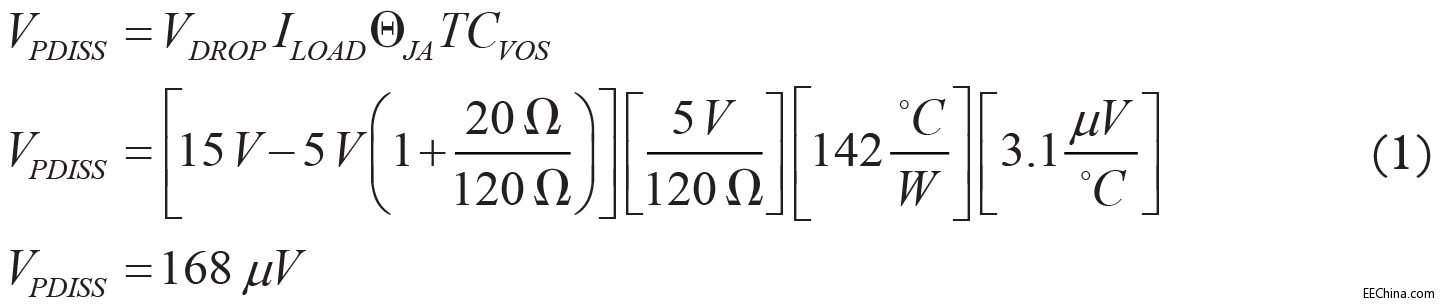
| 功耗[td]VDD = 15 V [td]等式1[td]168 µV[/tr] |
| 0 V < VCM < 5 V [/tr] |
| 增益误差[td]0 V < VCM < 5 V [td]5 V × 1/(105 dB + 1)[td]27 µV[/tr] |
| –40°C < T < +125°C [/tr] |
| 电源抑制[td]6.75 V < VDD < 15 V [td]8.25 V/120 dB [td]8 µV [/tr] |
| 总误差[td] [td][td]844 µV [/tr] |

 举报
举报
更多回帖


