内核配置和补丁包
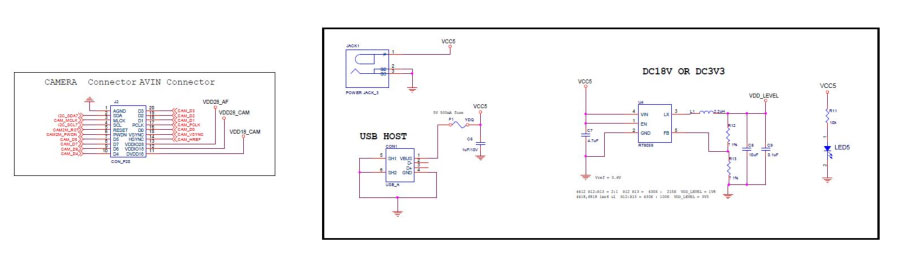
由硬件部分可知,步进电机使用的是 camera 接口,内核默认状态会编译 camera 驱动,camera 驱动会占用电机用到的四个 GPIO,所以首先需要在内核配置中将 camera 驱动去掉。然后添加驱动补丁包,重新编译内核,烧写到内核中。
2.1 内核配置
进入内核目录,配置所需要的缺省文件,使用命令“make menuconfig”,如下图所示,进入配置界面。
选中“Device Drivers ---》”进入。

如下图所示,选中“Multimedia support ---》”,进到选项中。

如下图所示,进入“Video capture adapters ---》”选项。

如下图所示,取消“OmniVision OV5640 sensor support ”,这个是摄像头 ov5640的配置选项。

如上图所示,取消 ov5640 的选项,然后保存退出,得到新的.config 文件。
2.2 修改 Makefile 文件
然后需要修改 Makefile 文件。
打开“drivers/char/Makefile”文件,如下图所示。
增加以下代码:
obj-y += topeet_modules/

然后保存退出。
2.3 补丁包
驱动补丁包“topeet_modules_20190319.tar.gz”和文档放在一起。
补丁包同时也放在网盘链接“iTOP4412 开发板资料汇总(不含光盘内容)/iTOP-4412开发板系统源码及镜像(其他)/topeet_modules”目录下的“topeet_modules_20190319.tar.gz”下,日期可能会有变化,使用最新日期的压缩包即可。
拷贝到“drivers/char”目录下,使用命令“tar -vxftopeet_modules_20190319.tar.gz”解压,如下图所示。

2.4 内核编译和测试
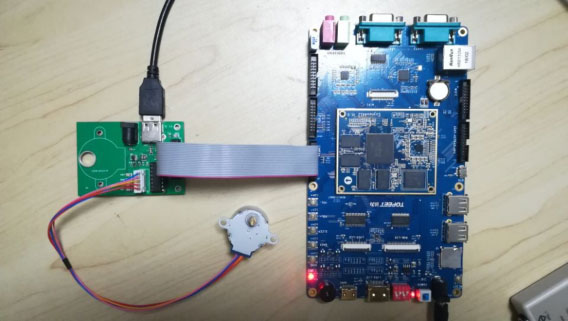
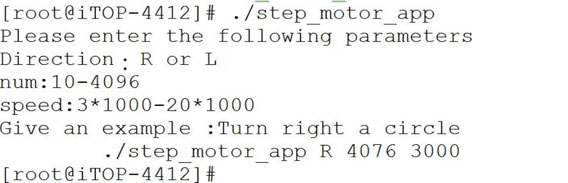
重新编译内核,烧写到开发板,启动开发板,如下图所示。在“/dev”目录下可以看到有设备节点“step_motor_driver”生成。

至此,内核驱动配置完成。这个时候给步进电机上电,会发现四个并排的小灯已经灭了。
内核配置和补丁包
由硬件部分可知,步进电机使用的是 camera 接口,内核默认状态会编译 camera 驱动,camera 驱动会占用电机用到的四个 GPIO,所以首先需要在内核配置中将 camera 驱动去掉。然后添加驱动补丁包,重新编译内核,烧写到内核中。
2.1 内核配置
进入内核目录,配置所需要的缺省文件,使用命令“make menuconfig”,如下图所示,进入配置界面。
选中“Device Drivers ---》”进入。
如下图所示,选中“Multimedia support ---》”,进到选项中。
如下图所示,进入“Video capture adapters ---》”选项。
如下图所示,取消“OmniVision OV5640 sensor support ”,这个是摄像头 ov5640的配置选项。
如上图所示,取消 ov5640 的选项,然后保存退出,得到新的.config 文件。
2.2 修改 Makefile 文件
然后需要修改 Makefile 文件。
打开“drivers/char/Makefile”文件,如下图所示。
增加以下代码:
obj-y += topeet_modules/
然后保存退出。
2.3 补丁包
驱动补丁包“topeet_modules_20190319.tar.gz”和文档放在一起。
补丁包同时也放在网盘链接“iTOP4412 开发板资料汇总(不含光盘内容)/iTOP-4412开发板系统源码及镜像(其他)/topeet_modules”目录下的“topeet_modules_20190319.tar.gz”下,日期可能会有变化,使用最新日期的压缩包即可。
拷贝到“drivers/char”目录下,使用命令“tar -vxftopeet_modules_20190319.tar.gz”解压,如下图所示。
2.4 内核编译和测试
重新编译内核,烧写到开发板,启动开发板,如下图所示。在“/dev”目录下可以看到有设备节点“step_motor_driver”生成。
至此,内核驱动配置完成。这个时候给步进电机上电,会发现四个并排的小灯已经灭了。

 举报
举报