在过去几年里,一系列新的终端市场和应用开始涌现,推动了对更高性能位置传感器的需求。这在磁性位置传感器 IC 领域尤为明显,此类传感器的供应商已经响应市场的急切呼唤,开始推出新产品,专为快速发展的机器人和无人机市场量身定制。新型磁性位置传感器更加智能,可提供更高的分辨率和精度,更小更轻,而且功耗远远低于其前代产品。本文将简述一下磁性位置传感器的历史,以及它们以往所服务的终端市场和服务方式,然后深入探讨当今新一代器件中引入的特殊的新功能和性能。最后,聚焦机器人和无人机领域,分享这些新式的创新型磁性位置传感器的几个用例。

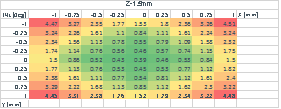
 1o,采用 WLCSP (2.07mm x 2.63mmx0.6mm) 封装,在自动低功耗模式下仅消耗 1.5mA 电流。以下是 AS5600L 的 INL 误差的两个示例仿真图,空隙 (Z) 为 1.5mm,目标磁铁和传感器自身之间的 X/Y 偏差不超过 ±1mm。在图中可以看到,X/Y 零偏差时,两个目标磁铁均可实现 INL 误差 < ±0.5o。当空隙 < 1.5mm 时,INL 误差甚至可以更小。
1o,采用 WLCSP (2.07mm x 2.63mmx0.6mm) 封装,在自动低功耗模式下仅消耗 1.5mA 电流。以下是 AS5600L 的 INL 误差的两个示例仿真图,空隙 (Z) 为 1.5mm,目标磁铁和传感器自身之间的 X/Y 偏差不超过 ±1mm。在图中可以看到,X/Y 零偏差时,两个目标磁铁均可实现 INL 误差 < ±0.5o。当空隙 < 1.5mm 时,INL 误差甚至可以更小。 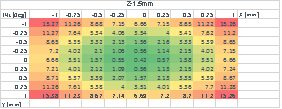

 举报
举报