传感器开发平台
登录
直播中
贾翠晓
7年用户
162经验值
私信
关注
关于可穿戴型下肢助力机器人感知系统研究
开启该帖子的消息推送
机器人
可穿戴
可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体腿部的协调运动并提供助力,降低人在负重或长时间行走情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体。
回帖
(1)
冯琳
2020-4-27 15:18:28
目前,世界上大约有10余家实验室从事可穿戴型人体助力机器人的研究,其中日本和美国走在前列,国内尚未见相关报道。日本筑波大学(Tsukuba University)在2002年研制开发了机器人装混合助力腿(hyhrid assis-tive limb,HAL),机械外骨骼绑缚在人腿的两侧,利用贴在腿部皮肤上的EMG传感器检测肌肉的电流,控制电动马达驱动机械外骨骼运动以辅助腿部的动作。美国加州大学伯克利分校机器人和人体工程实验室研制出美军“伯克利下肢外骨骼”(Berkeley lower extremity exoskeleton, BLE-EX),由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。然而上述装置存在着共同的缺点,由于肌电传感器是根据肌肉活动时皮肤表面传送的微弱电流信号或肌肉的软硬程度来推断人的行为意识,导致所采用的大部分传感器要与人体肌肤直接接触并粘贴在肌肤上,需要特别的固定装置,这样直接导致穿戴上的不便;人体分泌的汗液、传感器安装的好坏等将影响所获取信息的稳定与准确性,而且信息量大而复杂,易受干扰,从而使控制难度加大。因此,本文设计一种新型的可穿戴型下肢助力机器人感知系统,该系统用于获取人体下肢和机器人外骨骼之间的接触力,利用这些力信息和关节角度信息控制机器人外骨骼以实现对人体下肢运动的助力。
2 助力机器人系统
可穿戴型下肢助力机器人主要由机械、传感和控制三大部分组成。机器人外骨架包含12个自由度,每只腿有6个自由度,髋关节包含3个自由度,膝关节、踝关节和脚底各包含1个自由度,该设计要求不仅符合以往的拟人机器人行走机构的设计要求,又达到与人体腿部运动相协调、互不产生运动干涉的设计要求,如图 1所示。
执行部分主要指直流伺服电机,该系统需要4个,它们分别固定在两腿髋关节和膝关节上。可穿戴型下肢助力机器人控制系统主要采用PC104嵌入式控制系统板和PC104CAN卡,整个系统的控制结构见图2。
3 机器人感知模块
3.1 人机系统接触信息
可穿戴型下肢助力机器人主要利用人体下肢运动信息提供助力,这些运动信息主要包括人体与外骨骼机器人的腿部接触力信号、脚底力信号,膝关节和踝关节的角度信号等。为了获取这些运动信息,设计一套基于CAN总线的多传感器感知系统,解决了传统的传感器通信方式(主要是指RS-232和RS-485)中主节点单一和实时性差等问题。该系统由电机码盘、安装在腿部的2个二维力传感器和安装在脚底的6个一维力传感器组成。腿部力传感器固定在人腿膝关节和踝关节上部,用于测量人体与外骨骼之间的接触力;脚底力传感器安装在脚尖和脚跟,用于测量地面反力;电机码盘用于测量髋关节和膝关节转动角度,如图1所示。
3.2 系统设计
腿部二维力传感器是用于测量机器人外骨骼和人体之间的接触力大小的传感器,其测量的准确性和稳定性对助力机器人的控制有重要的意义。腿部力传感器主要是由2个二维力传感器组成,用于测量人体大、小腿与机器人外骨骼之间的接触力,该接触力包括沿人体腿部的力(X方向)和垂直腿部的力(Y方向)。在下肢助力机器人的控制中,除了要知道人体腿部与机器人的作用力之外,还需要知道人体脚底对机器人的作用力,而脚部力传感器是测量地面对人机系统的作用反力。人体落脚对地面的着力点可以用三个支撑点表示,这三个支撑点的位置分别位于第一跖骨根部和第五跖骨根部以及后脚跟,人体靠这三点间产生的足弓支撑身体,而身体的重量经由这三点传递到地面。为了准确获取行走时脚底的力信息,脚底力传感器的安装位置就定在这三点的位置上,每只脚需要安装3个一维力传感器,共需要 6个一维力传感器,具体安装位置见图3。由于脚底机械部分的限制,传感器弹性体体积比较小,其本体机械尺寸φ40 mm(直径)×8 mm(厚度),量程为1000 N。
3.3 传感器设计
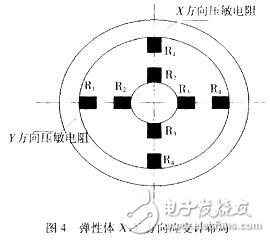
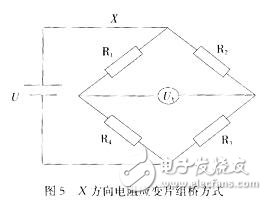
弹性体的设计是多维传感器设计中的关键。本文在利用有限元分析方法对传感器弹性体的静态和动态特性仿真分析的基础上,设计一种基于E型膜片的弹性体结构,这种结构的传感器具有结构简单、灵敏度高、维间耦合小、容易标定的特点。整个弹性体主要由弹性膜片、应变计和受力转接体三个部分组成,弹性体由两层 E型膜片构成,实现X和Y两个方向应变力的测量。弹性膜片为圆形结构,其直径和厚度分别为φ15 mm和2 mm,厚度方向和测量方向一致。敏感元件采用箔式电阻应变片,应变片粘贴在E型膜片上。传感器的输出是E型膜片的应力,应力的测量方式很多,本研究采用箔式电阻应变片,应变片粘贴在E型膜片上,用于测量弹性体上应力的大小。应变计贴片位置如图4所示,X和Y方向应变片安装在E型膜片的下端,四片应变片电阻组成一个惠斯登全桥电路(如图5所示),实现输出信号的自动解耦。当力作用于传感器时,由于力大小、方向的不同,各个方向的敏感电阻受到的应力不同,从而得到力与应变之间的关系。以X方向为例,E型膜片敏感弹性部分的圆环平膜片属于薄板结构,在X向力的作用下,边界条件比较简单,可以等效为外圆周固定,集中应力作用在硬中心的圆形薄板。根据薄板理论可知,周边固支具有硬中心的膜片在半径r处的径向应力εr和切向应力εθ为
式中:ω,h分别为圆形膜片的法向位移和厚度;F为施加力的等效集中力;f(r),P(r)是仅与r有关的函数。
由上式可以看出,当半径r一定,也就是压敏电阻位置固定时,圆形膜片表面上的应变ε为
ε=kFF (3)
式中kF为应变系数常量。
由于使用等臂电桥,即R1=R2=R3=R4,有
式中:ε1,ε2,ε3,ε4分别是4个敏感电阻R1,R2,R3,R4的应变;ε为圆形膜片的总应变;G,k为常量;UX是桥路输出电压。
综合式(4),(5),桥路的输出电压信号正比于传感器的力信号,测量输出电压信号就可以得到被测目标的力信号。
传感器硬件电路采用嵌入式片上系统,由数字电路和模拟电路两部分组成,其中模拟电路由信号调零电路、运算放大电路和模拟滤波电路组成;数字电路部分主要包括A/D采样模块、数字计算模块、CAN总线控制器、CAN总线驱动器和必要的外围电路模块。图6是助力机器人力传知系统的数据采集与处理系统的硬件电路原理框图。
软件设计分为下位机(微处理器)的软件设计和上位机(PC)的软件设计。每个传感器作为一个节点通过CAN总线互联,当接收到上位机的命令后,首先进行命令判断,根据不同的命令作出相应的数据处理。上位机(PC)主要包括清零点、力信息(数字量)、回传力信息、查询力信息、屏蔽报警等命令。下位机的软件设计主要由数据采集程序(A/D转换)、数据处理程序以及CAN总线通讯程序三大部分组成。启动CAN中断以前,在主程序中进行一次数据采集,得到传感器系统的初始值,这其中包括3个A/D转换通道;延时,完成通道的初始化;数据采集是在CAN中断程序中完成的,每一次中断完成1组三维力信息数据的采集以及相应的A/D转换;同时读取转换结果,对转换结果进行数字处理,数字处理主要由数字滤波与力信息解耦两大部分组成,数字滤波主要采用窗口移动法与数据平均值法相结合;数据经过解耦处理后,通过SendData()函数,将数据发送到CAN总线上,上位机通过ID号识别接受下位机数据,具体流程见图 7。
4 传感器标定实验
E型膜片元件结构的复杂性使得产品特性的一致性比一维传感器更难保证,应变计的贴片工艺很难保证绝对理想情况,这些因素决定传感器的实际静态特性和理论计算值之间存在一定的误差,因此传感器的静态特性一般采用标定实验的方法获取,其标定准确度将直接影响传感器使用时的测量准确度。所谓传感器的标定,就是建立传感器的三路输出值与作用在传感器坐标系原点上的三维力之间的数量关系。标定实验过程包括静态标定和实时测量验证两部分。为了减少随机误差的影响,采用一种具有一定冗余力向量的最小二乘标定方法。设F是加载力矩阵,V为传感器的输出矩阵(数字量),C为标定矩阵,E为误差矩阵,则
F=CV+E (6)
式中:F,V为已知量;E可以设定。于是,标定矩阵的求解可以转化为求解标定矩阵C,使式(6)在最小二乘法意义下最优。在微型指力传感器标定过程中,对施加在传感器上X,Y方向的载荷和敏感桥路之间的关系进行测量,其测量值(数字量)与所加砝码数值的对应关系如图8所示(XLable表示传感器标定所加载荷,Ylable表示传感器输出数字量)。
从图8可以看出,传感器X方向加力时,所受载荷和传感器敏感桥路输出之间的映射关系可以基本认为是线性的,Y方向的最大耦合不超过2.5%。利用最小二乘法得到传感器的两组静态标定矩阵为由此可以计算出传感器的I类误差为2%,II类误差为2.5%。利刚C1,C2两组标定矩阵对传感器进行实时测量检验,结果显示I类最大误差不超过2%,II类误差不超过2.5%。通过该标定系统得到的静态标定矩阵和理论设计值比较接近,说明标定系统和标定方案是切实可行的。
5 结 论
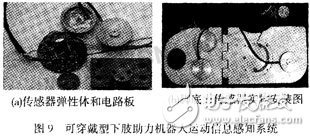
本文针对一种新型的人体辅助型康复机器人,设计了一套基于CAN总线的下肢运动信息感知系统,见图9。经分析可穿戴型助力机器人所需要的控制信息可确定传感器的种类、数量和安装位置;重点介绍腿部和脚底力传感器的弹性体设计,测量电路和上下位机软件;对传感器进行标定实验并对数据进行分析,给出传感器的一般性能指标,结果说明本研究中的设计理论和设计过程是正确的,基本可以满足可穿戴型下肢助力机器人控制系统的需要。未来的工作主要集中在以下几点:①继续完善传感器的弹性体结构,在满足传感器性能指标的基础上进一步减小传感器弹性体体积和精确确定应变计的贴片位置;②完善传感器的测量电路设计,增加滤波电路,改进放大电路;③改进传感器的标定系统,把标定误差降至最低。
目前,世界上大约有10余家实验室从事可穿戴型人体助力机器人的研究,其中日本和美国走在前列,国内尚未见相关报道。日本筑波大学(Tsukuba University)在2002年研制开发了机器人装混合助力腿(hyhrid assis-tive limb,HAL),机械外骨骼绑缚在人腿的两侧,利用贴在腿部皮肤上的EMG传感器检测肌肉的电流,控制电动马达驱动机械外骨骼运动以辅助腿部的动作。美国加州大学伯克利分校机器人和人体工程实验室研制出美军“伯克利下肢外骨骼”(Berkeley lower extremity exoskeleton, BLE-EX),由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。然而上述装置存在着共同的缺点,由于肌电传感器是根据肌肉活动时皮肤表面传送的微弱电流信号或肌肉的软硬程度来推断人的行为意识,导致所采用的大部分传感器要与人体肌肤直接接触并粘贴在肌肤上,需要特别的固定装置,这样直接导致穿戴上的不便;人体分泌的汗液、传感器安装的好坏等将影响所获取信息的稳定与准确性,而且信息量大而复杂,易受干扰,从而使控制难度加大。因此,本文设计一种新型的可穿戴型下肢助力机器人感知系统,该系统用于获取人体下肢和机器人外骨骼之间的接触力,利用这些力信息和关节角度信息控制机器人外骨骼以实现对人体下肢运动的助力。
2 助力机器人系统
可穿戴型下肢助力机器人主要由机械、传感和控制三大部分组成。机器人外骨架包含12个自由度,每只腿有6个自由度,髋关节包含3个自由度,膝关节、踝关节和脚底各包含1个自由度,该设计要求不仅符合以往的拟人机器人行走机构的设计要求,又达到与人体腿部运动相协调、互不产生运动干涉的设计要求,如图 1所示。
执行部分主要指直流伺服电机,该系统需要4个,它们分别固定在两腿髋关节和膝关节上。可穿戴型下肢助力机器人控制系统主要采用PC104嵌入式控制系统板和PC104CAN卡,整个系统的控制结构见图2。
3 机器人感知模块
3.1 人机系统接触信息
可穿戴型下肢助力机器人主要利用人体下肢运动信息提供助力,这些运动信息主要包括人体与外骨骼机器人的腿部接触力信号、脚底力信号,膝关节和踝关节的角度信号等。为了获取这些运动信息,设计一套基于CAN总线的多传感器感知系统,解决了传统的传感器通信方式(主要是指RS-232和RS-485)中主节点单一和实时性差等问题。该系统由电机码盘、安装在腿部的2个二维力传感器和安装在脚底的6个一维力传感器组成。腿部力传感器固定在人腿膝关节和踝关节上部,用于测量人体与外骨骼之间的接触力;脚底力传感器安装在脚尖和脚跟,用于测量地面反力;电机码盘用于测量髋关节和膝关节转动角度,如图1所示。
3.2 系统设计
腿部二维力传感器是用于测量机器人外骨骼和人体之间的接触力大小的传感器,其测量的准确性和稳定性对助力机器人的控制有重要的意义。腿部力传感器主要是由2个二维力传感器组成,用于测量人体大、小腿与机器人外骨骼之间的接触力,该接触力包括沿人体腿部的力(X方向)和垂直腿部的力(Y方向)。在下肢助力机器人的控制中,除了要知道人体腿部与机器人的作用力之外,还需要知道人体脚底对机器人的作用力,而脚部力传感器是测量地面对人机系统的作用反力。人体落脚对地面的着力点可以用三个支撑点表示,这三个支撑点的位置分别位于第一跖骨根部和第五跖骨根部以及后脚跟,人体靠这三点间产生的足弓支撑身体,而身体的重量经由这三点传递到地面。为了准确获取行走时脚底的力信息,脚底力传感器的安装位置就定在这三点的位置上,每只脚需要安装3个一维力传感器,共需要 6个一维力传感器,具体安装位置见图3。由于脚底机械部分的限制,传感器弹性体体积比较小,其本体机械尺寸φ40 mm(直径)×8 mm(厚度),量程为1000 N。
3.3 传感器设计
弹性体的设计是多维传感器设计中的关键。本文在利用有限元分析方法对传感器弹性体的静态和动态特性仿真分析的基础上,设计一种基于E型膜片的弹性体结构,这种结构的传感器具有结构简单、灵敏度高、维间耦合小、容易标定的特点。整个弹性体主要由弹性膜片、应变计和受力转接体三个部分组成,弹性体由两层 E型膜片构成,实现X和Y两个方向应变力的测量。弹性膜片为圆形结构,其直径和厚度分别为φ15 mm和2 mm,厚度方向和测量方向一致。敏感元件采用箔式电阻应变片,应变片粘贴在E型膜片上。传感器的输出是E型膜片的应力,应力的测量方式很多,本研究采用箔式电阻应变片,应变片粘贴在E型膜片上,用于测量弹性体上应力的大小。应变计贴片位置如图4所示,X和Y方向应变片安装在E型膜片的下端,四片应变片电阻组成一个惠斯登全桥电路(如图5所示),实现输出信号的自动解耦。当力作用于传感器时,由于力大小、方向的不同,各个方向的敏感电阻受到的应力不同,从而得到力与应变之间的关系。以X方向为例,E型膜片敏感弹性部分的圆环平膜片属于薄板结构,在X向力的作用下,边界条件比较简单,可以等效为外圆周固定,集中应力作用在硬中心的圆形薄板。根据薄板理论可知,周边固支具有硬中心的膜片在半径r处的径向应力εr和切向应力εθ为
式中:ω,h分别为圆形膜片的法向位移和厚度;F为施加力的等效集中力;f(r),P(r)是仅与r有关的函数。
由上式可以看出,当半径r一定,也就是压敏电阻位置固定时,圆形膜片表面上的应变ε为
ε=kFF (3)
式中kF为应变系数常量。
由于使用等臂电桥,即R1=R2=R3=R4,有
式中:ε1,ε2,ε3,ε4分别是4个敏感电阻R1,R2,R3,R4的应变;ε为圆形膜片的总应变;G,k为常量;UX是桥路输出电压。
综合式(4),(5),桥路的输出电压信号正比于传感器的力信号,测量输出电压信号就可以得到被测目标的力信号。
传感器硬件电路采用嵌入式片上系统,由数字电路和模拟电路两部分组成,其中模拟电路由信号调零电路、运算放大电路和模拟滤波电路组成;数字电路部分主要包括A/D采样模块、数字计算模块、CAN总线控制器、CAN总线驱动器和必要的外围电路模块。图6是助力机器人力传知系统的数据采集与处理系统的硬件电路原理框图。
软件设计分为下位机(微处理器)的软件设计和上位机(PC)的软件设计。每个传感器作为一个节点通过CAN总线互联,当接收到上位机的命令后,首先进行命令判断,根据不同的命令作出相应的数据处理。上位机(PC)主要包括清零点、力信息(数字量)、回传力信息、查询力信息、屏蔽报警等命令。下位机的软件设计主要由数据采集程序(A/D转换)、数据处理程序以及CAN总线通讯程序三大部分组成。启动CAN中断以前,在主程序中进行一次数据采集,得到传感器系统的初始值,这其中包括3个A/D转换通道;延时,完成通道的初始化;数据采集是在CAN中断程序中完成的,每一次中断完成1组三维力信息数据的采集以及相应的A/D转换;同时读取转换结果,对转换结果进行数字处理,数字处理主要由数字滤波与力信息解耦两大部分组成,数字滤波主要采用窗口移动法与数据平均值法相结合;数据经过解耦处理后,通过SendData()函数,将数据发送到CAN总线上,上位机通过ID号识别接受下位机数据,具体流程见图 7。
4 传感器标定实验
E型膜片元件结构的复杂性使得产品特性的一致性比一维传感器更难保证,应变计的贴片工艺很难保证绝对理想情况,这些因素决定传感器的实际静态特性和理论计算值之间存在一定的误差,因此传感器的静态特性一般采用标定实验的方法获取,其标定准确度将直接影响传感器使用时的测量准确度。所谓传感器的标定,就是建立传感器的三路输出值与作用在传感器坐标系原点上的三维力之间的数量关系。标定实验过程包括静态标定和实时测量验证两部分。为了减少随机误差的影响,采用一种具有一定冗余力向量的最小二乘标定方法。设F是加载力矩阵,V为传感器的输出矩阵(数字量),C为标定矩阵,E为误差矩阵,则
F=CV+E (6)
式中:F,V为已知量;E可以设定。于是,标定矩阵的求解可以转化为求解标定矩阵C,使式(6)在最小二乘法意义下最优。在微型指力传感器标定过程中,对施加在传感器上X,Y方向的载荷和敏感桥路之间的关系进行测量,其测量值(数字量)与所加砝码数值的对应关系如图8所示(XLable表示传感器标定所加载荷,Ylable表示传感器输出数字量)。
从图8可以看出,传感器X方向加力时,所受载荷和传感器敏感桥路输出之间的映射关系可以基本认为是线性的,Y方向的最大耦合不超过2.5%。利用最小二乘法得到传感器的两组静态标定矩阵为由此可以计算出传感器的I类误差为2%,II类误差为2.5%。利刚C1,C2两组标定矩阵对传感器进行实时测量检验,结果显示I类最大误差不超过2%,II类误差不超过2.5%。通过该标定系统得到的静态标定矩阵和理论设计值比较接近,说明标定系统和标定方案是切实可行的。
5 结 论
本文针对一种新型的人体辅助型康复机器人,设计了一套基于CAN总线的下肢运动信息感知系统,见图9。经分析可穿戴型助力机器人所需要的控制信息可确定传感器的种类、数量和安装位置;重点介绍腿部和脚底力传感器的弹性体设计,测量电路和上下位机软件;对传感器进行标定实验并对数据进行分析,给出传感器的一般性能指标,结果说明本研究中的设计理论和设计过程是正确的,基本可以满足可穿戴型下肢助力机器人控制系统的需要。未来的工作主要集中在以下几点:①继续完善传感器的弹性体结构,在满足传感器性能指标的基础上进一步减小传感器弹性体体积和精确确定应变计的贴片位置;②完善传感器的测量电路设计,增加滤波电路,改进放大电路;③改进传感器的标定系统,把标定误差降至最低。
举报
更多回帖
rotate(-90deg);
回复
相关问答
机器人
可穿戴
基于CAN总线和双传感器仿人
机器人
运动控制
系统
的
研究
2020-08-19
2159
什么是下一代
机器人
感知
处理器?
2019-10-10
1804
柔性
可穿戴
电子器件的最新进展
2020-07-30
1381
什么是下一代
机器人
感知
处理器?
2019-10-08
2173
基于图像的
机器人
视觉伺服
系统
该怎么设计?
2019-09-27
3728
RIO嵌入式控制平台怎么
助力
机器人
应用?
2019-11-06
2503
机器人
系统
是什么?
2019-09-10
2610
什么是
机器人
控制
系统
2021-10-11
2743
工业
机器人
的发展趋势如何?
2020-03-27
2987
机器人
的定义是什么?工业
机器人
的应用有哪些?
2021-07-05
4634
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分










 举报
举报



