智能水下机器人在海洋石油开发、矿物资源开采、打捞和军事等方面都有广泛的应用前景[1][2][3]。水下机器人已经开始取代过去由载人潜器和潜水员所承担的工作,尤其是在大深度和危险区域发挥了更大的优势。


 举报
举报
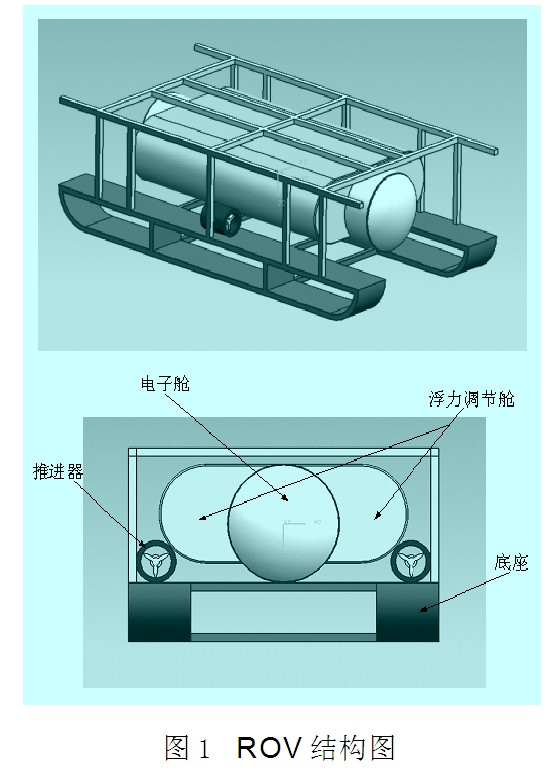
 134x120mm,重量:2kg。(3) 测扫声纳,长基线和超短基线水声定位系统。基于短基线和深度计获取位置信息,基于姿态传感器获取航向和姿态信息。(4) 压力传感器用于深度测量。(5) 可以搭载成像声纳、水下摄像机、荧光计、照明灯等。3.2 嵌入式控制系统嵌入式控制系统通过检测装置检测潜器的运动状态,将数据通过网络传输到水面计算机,水面计算机根据预定任务和预设算法计算出控制量,然后将控制量传给潜器,再由嵌入式系统控制潜器的运动装置。嵌入式控制系统框图如图2所示。
134x120mm,重量:2kg。(3) 测扫声纳,长基线和超短基线水声定位系统。基于短基线和深度计获取位置信息,基于姿态传感器获取航向和姿态信息。(4) 压力传感器用于深度测量。(5) 可以搭载成像声纳、水下摄像机、荧光计、照明灯等。3.2 嵌入式控制系统嵌入式控制系统通过检测装置检测潜器的运动状态,将数据通过网络传输到水面计算机,水面计算机根据预定任务和预设算法计算出控制量,然后将控制量传给潜器,再由嵌入式系统控制潜器的运动装置。嵌入式控制系统框图如图2所示。 举报
举报
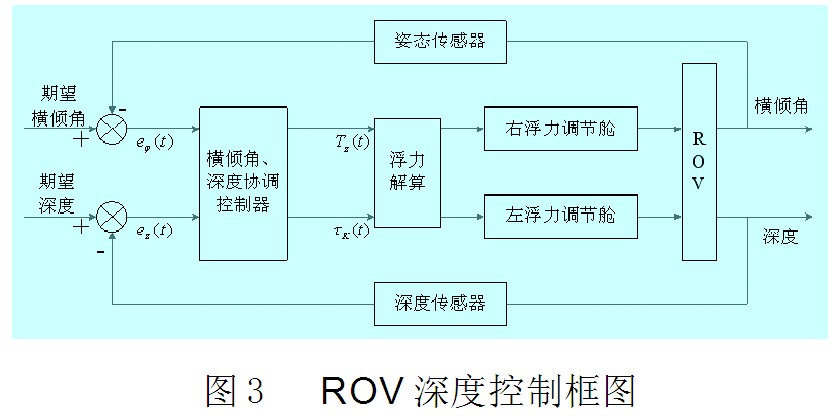
 的控制是通过调节ROV左右两个浮力调节舱的不同的注、排水量来产生左右两个浮力调节舱的浮力差,即产生旋转运动的偏倾力矩。在深度控制时,将深度传感器的测量值作为反馈,横倾角控制采用姿态传感器的测量值作为反馈,都采用积分分离PID控制器。横倾角、深度协调控制器根据输入期望深度与实际深度的偏差和期望横倾角与实际横倾角的偏差,输出控制ROV下降或者上升所需稳定的作用力,输出控制ROV偏转所需稳定偏转力矩,通过浮力解算输出左右两个浮力调节桶的注、排水量,实现ROV的横倾角控制和深度控制。积分分离PID控制器具体实现如下:⑴ 根据实际情况,人为设定一阀值
的控制是通过调节ROV左右两个浮力调节舱的不同的注、排水量来产生左右两个浮力调节舱的浮力差,即产生旋转运动的偏倾力矩。在深度控制时,将深度传感器的测量值作为反馈,横倾角控制采用姿态传感器的测量值作为反馈,都采用积分分离PID控制器。横倾角、深度协调控制器根据输入期望深度与实际深度的偏差和期望横倾角与实际横倾角的偏差,输出控制ROV下降或者上升所需稳定的作用力,输出控制ROV偏转所需稳定偏转力矩,通过浮力解算输出左右两个浮力调节桶的注、排水量,实现ROV的横倾角控制和深度控制。积分分离PID控制器具体实现如下:⑴ 根据实际情况,人为设定一阀值 ⑵ 当
⑵ 当 时,也即偏差值
时,也即偏差值 比较大时,采用PD,可避免过大的超调,又使系统有较快的响应。⑶ 当
比较大时,采用PD,可避免过大的超调,又使系统有较快的响应。⑶ 当 时,也即偏差值
时,也即偏差值 比较小时,采用PID控制,可保证系统的控制精度。写成计算公式,可在积分项前乘一个系数
比较小时,采用PID控制,可保证系统的控制精度。写成计算公式,可在积分项前乘一个系数
 ROV在水底的前进和转向运动通过控制两个螺旋桨推进器来实现。给定参数为航速和航向角,输出为两个推进器的推力。这里航向角控制器选择PID调节器。只有两个推进器,推力分配算法简单。
举报
ROV在水底的前进和转向运动通过控制两个螺旋桨推进器来实现。给定参数为航速和航向角,输出为两个推进器的推力。这里航向角控制器选择PID调节器。只有两个推进器,推力分配算法简单。
举报
 )和垂直面运动(包括状态变量
)和垂直面运动(包括状态变量 )两部分,并且认为这两个自由度之间不存在耦合关系。结合本文研究对象的情况,设计方案中ROV的外形为左右、前后对称,且重力、浮力分布可使其保持水平状态,无横倾或纵倾。其在水平面运动过程中,ROV满足条件:
)两部分,并且认为这两个自由度之间不存在耦合关系。结合本文研究对象的情况,设计方案中ROV的外形为左右、前后对称,且重力、浮力分布可使其保持水平状态,无横倾或纵倾。其在水平面运动过程中,ROV满足条件: 此外,由于其只沿纵向平行安装两个水平推进器,推进器的作用只限于产生水下机器人的进退和转艏运动。当左右推进器产生相同推力矢量时可引起进退运动,而当两者产生大小或方向不同的推力时则可引起转艏运动。根据上述假设和条件可以得到ROV在水平面内的简化模型:
此外,由于其只沿纵向平行安装两个水平推进器,推进器的作用只限于产生水下机器人的进退和转艏运动。当左右推进器产生相同推力矢量时可引起进退运动,而当两者产生大小或方向不同的推力时则可引起转艏运动。根据上述假设和条件可以得到ROV在水平面内的简化模型: 式中:
式中: ——包含附加质量的质量和转动惯量;
——包含附加质量的质量和转动惯量;
 —沿
—沿 方向的流体阻力中线性项和非线性项;
方向的流体阻力中线性项和非线性项; ——绕Z轴转动方向的流体阻力的线性项和非线性项;
——绕Z轴转动方向的流体阻力的线性项和非线性项; ——为推进器产生的X轴向力和绕Z轴的转艏力矩。ROV采用压载水舱进行垂直面的位置控制,其在垂直面的模型可以简化为:
——为推进器产生的X轴向力和绕Z轴的转艏力矩。ROV采用压载水舱进行垂直面的位置控制,其在垂直面的模型可以简化为: 式中:
式中: ——包含附加质量的质量;
——包含附加质量的质量; ——沿Z方向流体阻力的线性项和非线性项;
——沿Z方向流体阻力的线性项和非线性项; ——压载水舱产生的垂向作用力。5.2 仿真验证
——压载水舱产生的垂向作用力。5.2 仿真验证
 表示ROV在大地坐标系下的位置和姿态。图5为ROV由初态
表示ROV在大地坐标系下的位置和姿态。图5为ROV由初态 控制ROV垂直下潜到10米处悬停。ROV横倾角
控制ROV垂直下潜到10米处悬停。ROV横倾角 的控制是通过调节特种ROV左右两个浮力调节舱的不同的注、排水量来产生左右两个浮力调节舱的浮力差,即产生旋转运动的偏倾力矩。其仿真结果如下图6所示。从仿真实验结果看出所设计的ROV深度协调控制器达到了预期的控制效果。
的控制是通过调节特种ROV左右两个浮力调节舱的不同的注、排水量来产生左右两个浮力调节舱的浮力差,即产生旋转运动的偏倾力矩。其仿真结果如下图6所示。从仿真实验结果看出所设计的ROV深度协调控制器达到了预期的控制效果。 举报
举报
更多回帖


