电机在现代生活中扮演着重要角色。出于对安全、成本及效率的考虑,工程师——尤其是混合电动力汽车(HEV)工程师——往往希望在特定的真实环境下通过仿真电机模型对电机控制器进行测试。


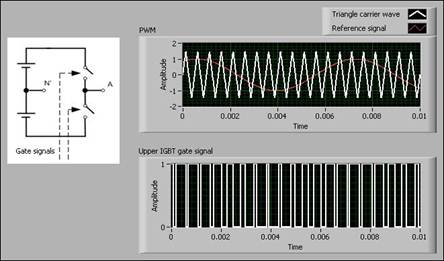
 时,上面一个电力电子器件的门极控制信号为高, 下面的器件的控制信号为低
时,上面一个电力电子器件的门极控制信号为高, 下面的器件的控制信号为低 时,上面一个电力电子器件的门极控制信号为低, 下面的器件的控制信号为高
时,上面一个电力电子器件的门极控制信号为低, 下面的器件的控制信号为高

 举报
举报

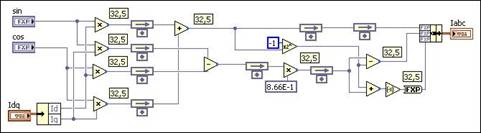
 。此类操作不涉及电流等时变参数,因此用户无需每步都更新该值。用户可将这个除法操作移至主机来运算,避免在FPGA中进行除法运算的棘手问题。
。此类操作不涉及电流等时变参数,因此用户无需每步都更新该值。用户可将这个除法操作移至主机来运算,避免在FPGA中进行除法运算的棘手问题。 举报
举报
更多回帖


