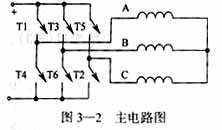
无刷直流电动机采用电子换向器替换了传统直流电动机的机械换向装置,从而克服了电刷和换向器所引起的噪声、火花、电磁干扰、寿命短等一系列弊病。由于无刷直流电动机既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具有直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故其在产业领域中的应用越来越广泛。
当前国内生产的电动执行器多由模拟器件控制,精度差;保护措施使用继电器和机械装置,可靠性差;很多电动执行器只能接收模拟信号(4~20mA、 1~5 V),不能与计算机进行通讯;系统集成度低、维护困难。这就使得现有的电动执行器不便于调试和维护,也不能根据生产的实际需要进行参数的现场调整,不便于实现数字化的分布式控制。
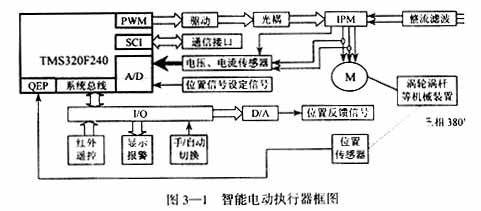
嵌进了微控制器的智能电动执行器是最新一代的产品。智能电动执行器性能优越,占据了相当的市场份额。这类电动执行用具有可靠性高、使用方便、通讯功能强、诊断保护功能完善、适应性广泛等优点。可以说,智能化已经成为电动执行器发展的趋势。
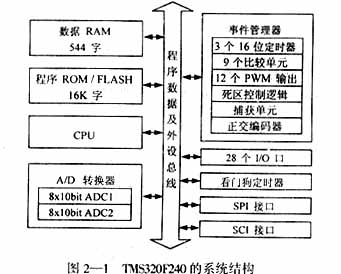
TMS320F240是美国TI公司推出的高性能16位数字信号处理器(DSP),是专门为电机的数字化控制而设计的。这种DSP包括一个定点DSP 内核及一系列微控制器外围电路,将数字信号处理的运算能力与面向电机的高效控制能力集于一体,可以实现用软件取代模拟器件,方便地修改控制策略,修正控制参数,兼具故障检测、自诊断和与上位机通讯等功能。因此它强化了电动执行器的作用
。
无刷直流电动机采用电子换向器替换了传统直流电动机的机械换向装置,从而克服了电刷和换向器所引起的噪声、火花、电磁干扰、寿命短等一系列弊病。由于无刷直流电动机既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具有直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故其在产业领域中的应用越来越广泛。
当前国内生产的电动执行器多由模拟器件控制,精度差;保护措施使用继电器和机械装置,可靠性差;很多电动执行器只能接收模拟信号(4~20mA、 1~5 V),不能与计算机进行通讯;系统集成度低、维护困难。这就使得现有的电动执行器不便于调试和维护,也不能根据生产的实际需要进行参数的现场调整,不便于实现数字化的分布式控制。
嵌进了微控制器的智能电动执行器是最新一代的产品。智能电动执行器性能优越,占据了相当的市场份额。这类电动执行用具有可靠性高、使用方便、通讯功能强、诊断保护功能完善、适应性广泛等优点。可以说,智能化已经成为电动执行器发展的趋势。
TMS320F240是美国TI公司推出的高性能16位数字信号处理器(DSP),是专门为电机的数字化控制而设计的。这种DSP包括一个定点DSP 内核及一系列微控制器外围电路,将数字信号处理的运算能力与面向电机的高效控制能力集于一体,可以实现用软件取代模拟器件,方便地修改控制策略,修正控制参数,兼具故障检测、自诊断和与上位机通讯等功能。因此它强化了电动执行器的作用
。

 举报
举报