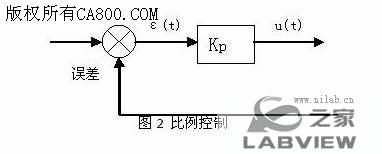
在自动控制中,一个系统的运行要求能够满足给定的性能指标,具有抗干扰能力和稳定性。对于被控制的对象,其本身的物理结构和工作过程是一定的,在给定信号作用时,对象的输出并不一定能满足系统的性能要求,所以需要加入一个控制器。控制器与被控对象以闭环的形式构成系统,以帮助整个系统的输出满足给定的性能指标,而控制器运用的控制规律多种多样。
PID(Proportional Integral Derivative比例微分积分)控制是控制工程中技术成熟,应用广泛的一种控制策略,它经过长期工程实践,已形成了一套完整的控制方法和典型的结构。
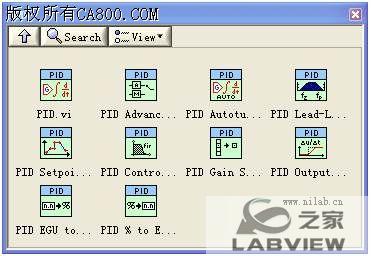
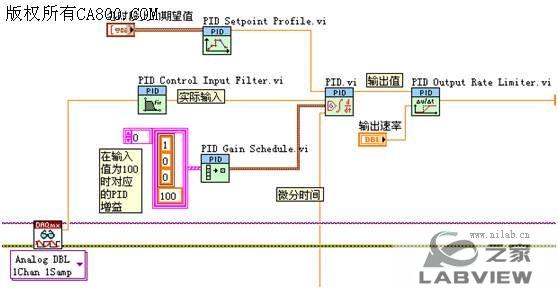
PID Lead/Lag.vi可以对PID控制器前端由系统反馈来的输入信号做动态补偿。PID Setpoint Profile.vi可以在期望值间断性变化时使其变得平滑。PID Control Input Filter.vi是一个五阶的低通滤波器,放在PID控制器的process variable前端,可以滤去小于采样率十分之一的输入值。PID Gain Schedule.vi可以写入几组增益参数,并给出条件,执行时当输入信号达到条件,便使用对应的一组参数给入到PID控制器的PID Gains上。PID Output Limiter.vi对PID控制器输出信号的变化速率进行控制,以保证外部接受控制信号部件的安全。PID EGU to %.vi和PID % to EGU.vi负责对实际数值和其在设定工程单元范围内占的百分比进行转换。
PID工具包提供的这10个VI,可以满足大多数场合的应用,根据不同的现场需求,使用不同的VI搭建PID控制器,十分方便(图6)。PID控制器输出的精准还和前端的输入信号是否精确密切相关,所以采集控制系统的前端输出而得到的系统反馈尤其重要。NI的DAQ数据采集卡不仅工作稳定,结合LabVIEW编程方便兼容性好,且种类很多,可满足工程师各类不同档次上的需求。相信在NI软硬件的配合下,能够使搭建PID控制系统变得更加方便快速顺利,起到事半功倍的效果。