 系统开发人员所面对的主要挑战可总结为以下三大类:程序、环境和传感器融合。在设计多传感器解决方案的过程中,对于急救任务的高度复杂性以及各种极端环境带来的挑战,必须要有全面的了解。
系统开发人员所面对的主要挑战可总结为以下三大类:程序、环境和传感器融合。在设计多传感器解决方案的过程中,对于急救任务的高度复杂性以及各种极端环境带来的挑战,必须要有全面的了解。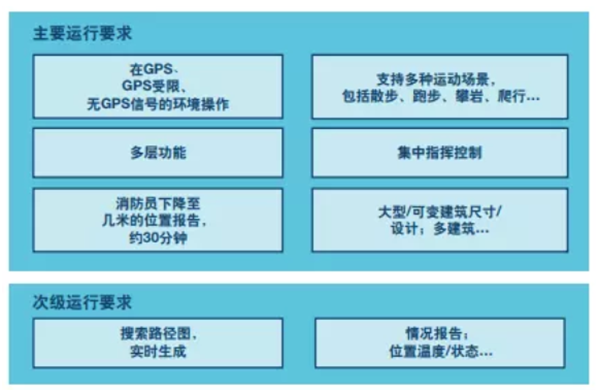
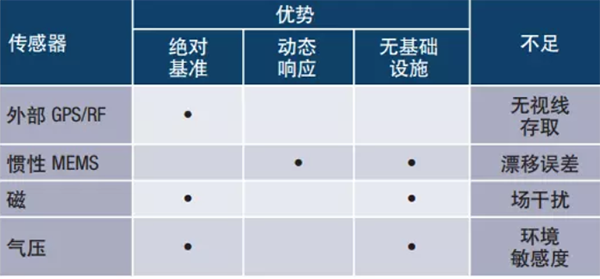 由于MEMS无需外部基础设施,并能在动态环境下提供精密检测,因此如果能在极端环境中工作以及如果与合适的次级传感器配合使用,它将在总体解决方案中发挥主要作用。
由于MEMS无需外部基础设施,并能在动态环境下提供精密检测,因此如果能在极端环境中工作以及如果与合适的次级传感器配合使用,它将在总体解决方案中发挥主要作用。 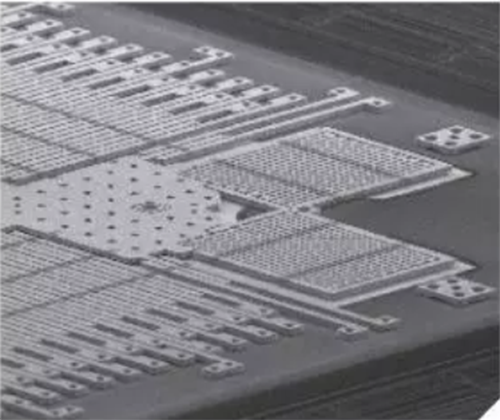
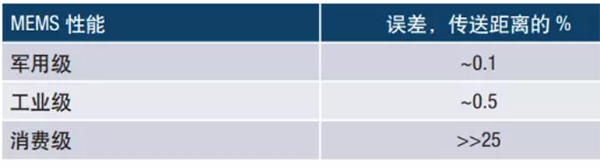 这种优势的原因需要仔细观察与目标应用相关的MEMS组件的关键规格。对于急救作业目标,MEMS传感器的一个关键任务是识别当前的运动类型并测量步数和步幅。不同于行人运动模型,急救人员运动将更加随机、动态和难以识别。此外,由于存在精度目标,传感器必须能够抑制错误运动,例如震动、冲击以及脚或身体左右摇晃/摇摆。
这种优势的原因需要仔细观察与目标应用相关的MEMS组件的关键规格。对于急救作业目标,MEMS传感器的一个关键任务是识别当前的运动类型并测量步数和步幅。不同于行人运动模型,急救人员运动将更加随机、动态和难以识别。此外,由于存在精度目标,传感器必须能够抑制错误运动,例如震动、冲击以及脚或身体左右摇晃/摇摆。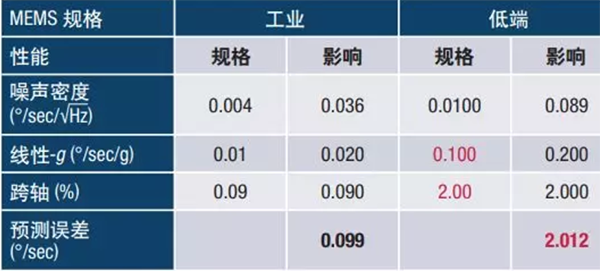 假设条件:50 Hz BW,2 g rms震动,100º/sec离轴旋转。
假设条件:50 Hz BW,2 g rms震动,100º/sec离轴旋转。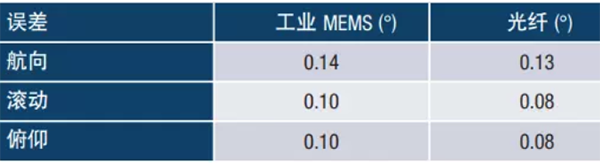 工业MEMS IMU示例为ADIS16488A,如图2所示,其中包含10自由度高性能传感,并适合最苛刻的应用,商业航空电子设备(如表6所示),证明了其对于急救极端应用已做好准备。
工业MEMS IMU示例为ADIS16488A,如图2所示,其中包含10自由度高性能传感,并适合最苛刻的应用,商业航空电子设备(如表6所示),证明了其对于急救极端应用已做好准备。 表6. ADIS16488A MEMS IMU;高性价比和成熟的高性能及可靠性
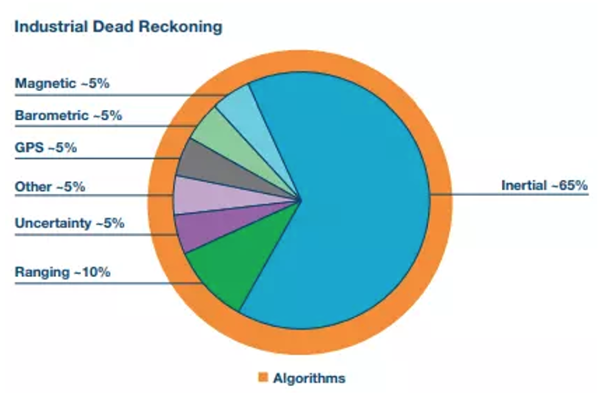
表6. ADIS16488A MEMS IMU;高性价比和成熟的高性能及可靠性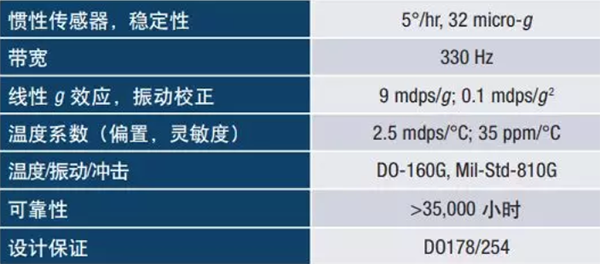 惯性MEMS性能的进步和持续验证的质量与耐用性,现正与集成方面的重大进步相结合。最后一个障碍特别具有挑战性,因为如果不精心管理,传感器尺寸与性能和耐用性成反比。具有高度战略性、协调性和挑战性的一系列工艺进步必须通过测试和合并来满足该应用所需的性能密度水平,如图3所示。
惯性MEMS性能的进步和持续验证的质量与耐用性,现正与集成方面的重大进步相结合。最后一个障碍特别具有挑战性,因为如果不精心管理,传感器尺寸与性能和耐用性成反比。具有高度战略性、协调性和挑战性的一系列工艺进步必须通过测试和合并来满足该应用所需的性能密度水平,如图3所示。

 虽然高性能传感器一定是PLM系统的核心,但以下也是实现系统的关键因素:
虽然高性能传感器一定是PLM系统的核心,但以下也是实现系统的关键因素:
更多回帖

