火星探测器作为一种遥控机器人,可以在不平坦的地形上运行。
你有没有想过火星车是如何在火星崎岖的地形上航行的?
秘密武器是巧妙的摇臂转向架(rocker-bogie)悬架系统。

摇臂转向架悬架系统是一种特殊的车轮悬挂装置,最主要用于火星探测车等需要在复杂地形行驶的车辆上。
它的主要特点有:
- 结构简单:没有使用弹簧,而是通过特殊的机械结构来实现悬挂功能。
- 六轮设计:通常有六个车轮,分为左右两组。
- 摇臂(Rocker):每侧有一个大的摇臂连接车身和车轮。
- 转向架(Bogie):每个摇臂末端连接一个小的转向架,转向架两端各有一个车轮。
- 灵活性强:这种设计让车辆能够轻松越过高度达到车轮直径两倍的障碍物。
- 稳定性好:即使在崎岖不平的地形上,也能保持车身相对平稳。
- 适应性强:六个车轮可以独立运动,使车辆能够适应各种复杂地形。
简单来说,这种悬架系统就像是给车子装上了六条灵活的"腿",让它能够像昆虫一样轻松地爬过各种障碍物,非常适合在火星这样地形复杂的环境中使用。
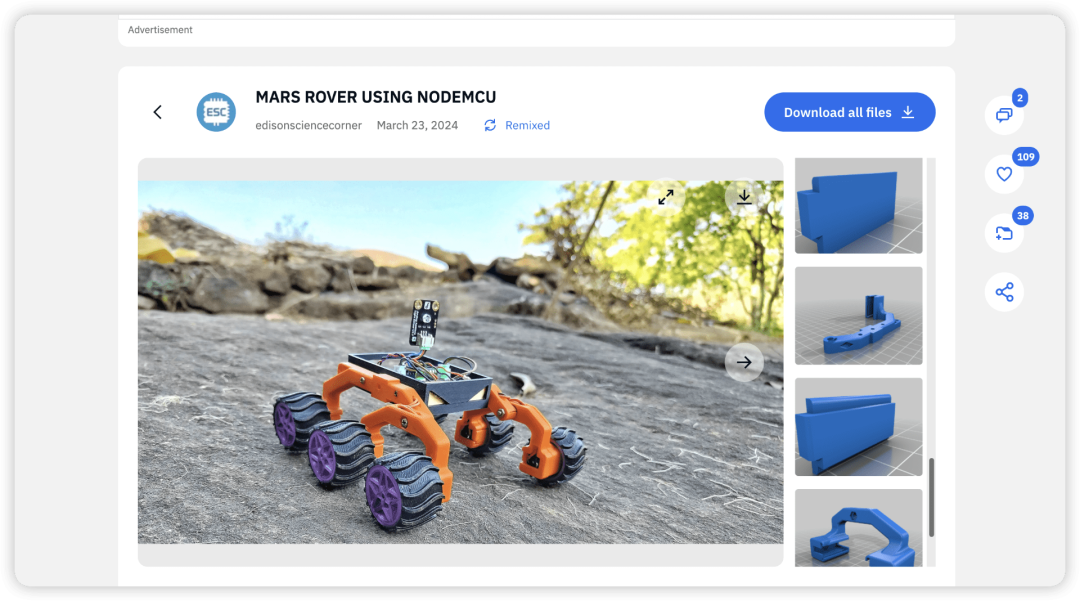
今天就和大家分享一辆3D打印的6轮摇臂转向架模型火星车。





这个简单模型的主体部分是3D打印的,火星车使用 ESP12E 作为大脑,L293D 作为电机控制器。遥控器使用相同的 ESP12E 微控制器。
除了可以用专用的遥控器控制,也可以使用手机应用程序控制。通过火星车上的传感器,可以在遥控器的OLED屏幕上看到实时的数据。流动站和遥控器之间的通信使用ESP-NOW协议。
这个项目非常适合对机器人感兴趣的小伙伴,下面是具体的制作过程。
ESP-NOW通讯
ESP-NOW 是由乐鑫开发的通信协议,专为 ESP8266 和 ESP32 设备之间的低功耗点对点通信而设计,无需传统的 Wi-Fi 网络或互联网连接即可实现高效的数据交换。
ESP-NOW 提供消息加密等基本安全功能,以保护传输的数据免受未经授权的访问。但是,需要注意的是,它无法提供与传统 Wi-Fi 网络中使用的更强大的协议(如 WPA2)相同的安全级别。
简单来说,我们可以在不使用任何外部组件的情况下将数据从一个ESP板传输和接收到另一个ESP板。通过使用ESP-NOW,我们可以降低项目的总成本。
所需组件
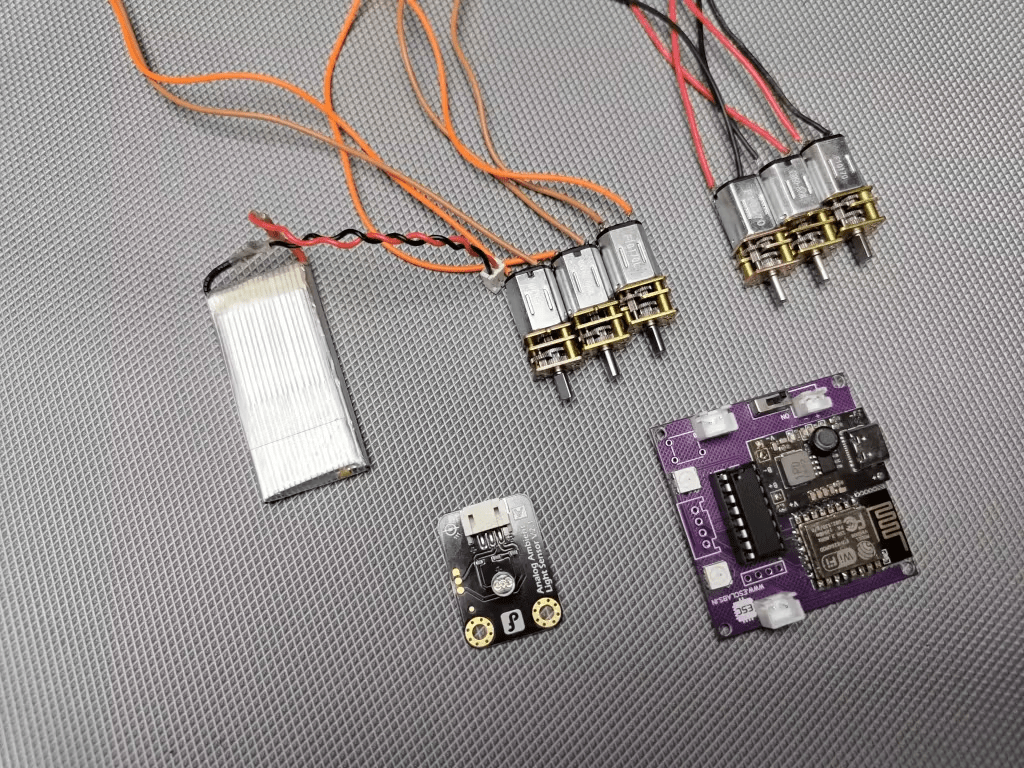
- NodeMCU ESP8266 Breakout 开发板 X2
- 模拟环境光线传感器(Arduino兼容)
- L293D 电机驱动器
- N20减速电机(60-100rpm
- 3.7v 锂离子电池
- 3.7v 至 5v 升压器
- ESP12E X1 (以下组件适用于 DIY PCB)
- 3.3V稳压器 AMS1117
- 4 针母 JST 连接器、2 针母 JST 连接器 、4 针接头 X1
- WS2812B neopixel X2
- 阻容等其他组件
电路图
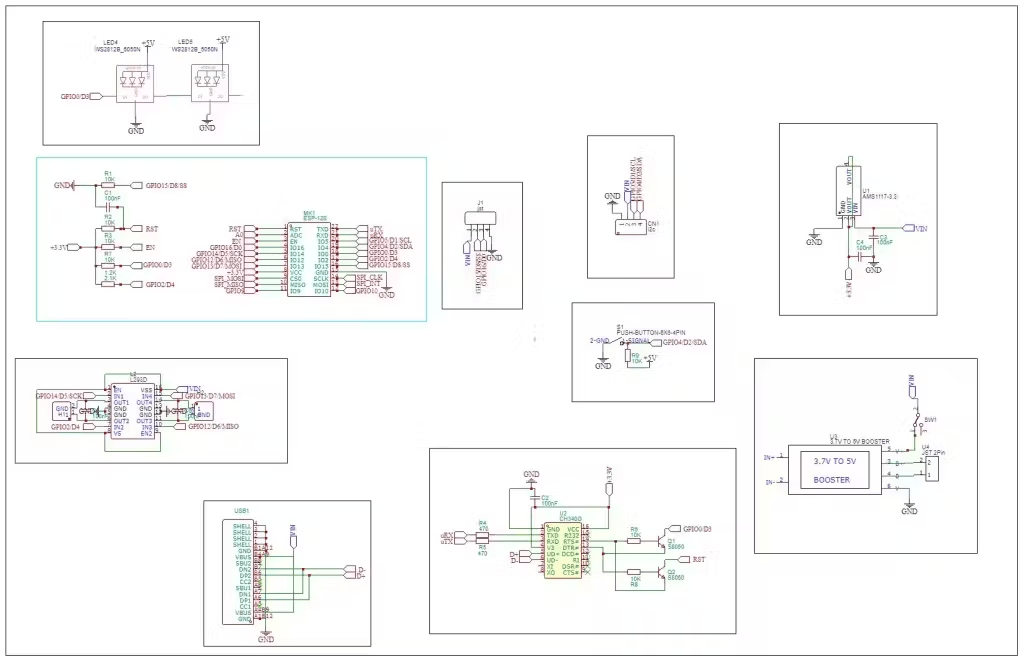
在这个电路图中,使用了 ESP12E 微控制器作为大脑。它有足够的引脚来控制电机,并且有一个模拟引脚来检测传感器数据。选择此模块的另一个主要原因是因为就是WiFi,通过 WiFi 和 ESP-NOW 通信来控制此模块。
为了控制电机,使用了 L293D 双通道 H 桥驱动器,一次双向控制两个电机。此外,还在电路中添加了电池充电模块。
PCB设计
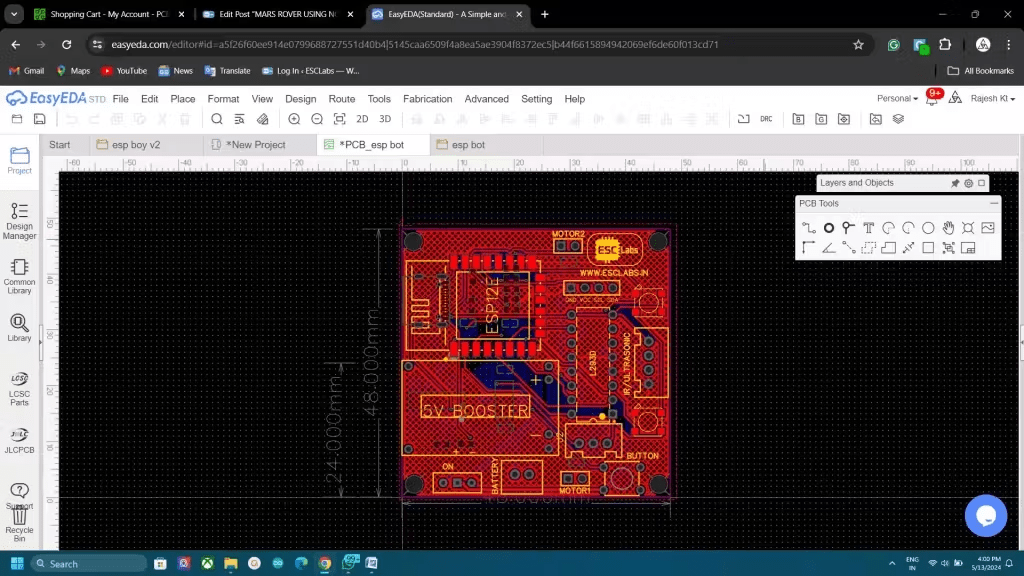
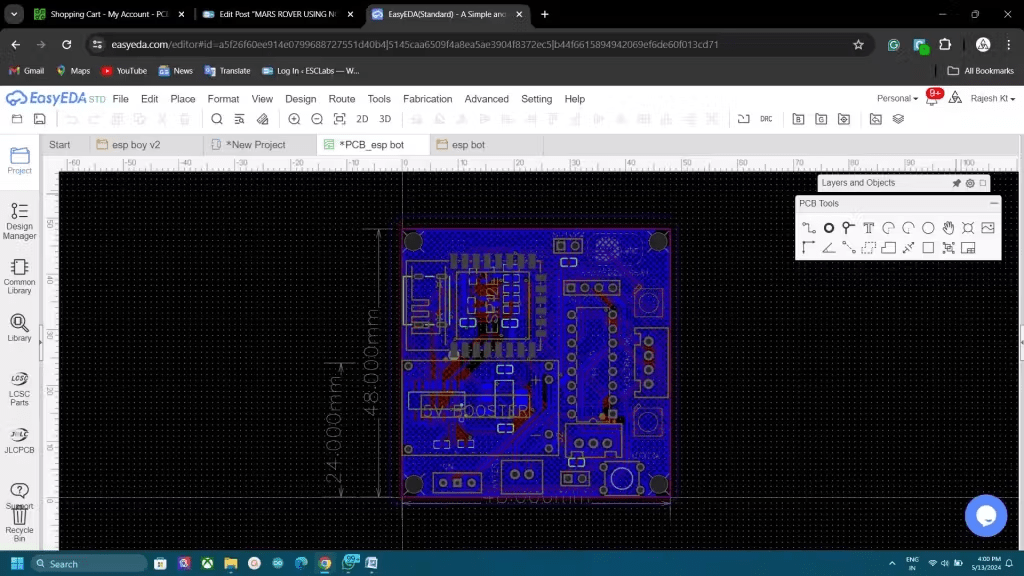
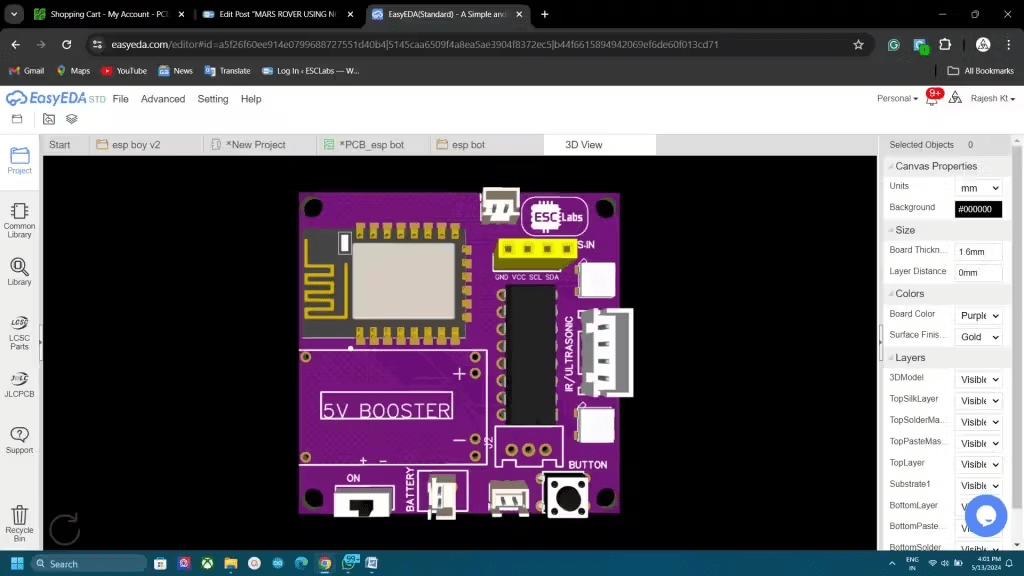
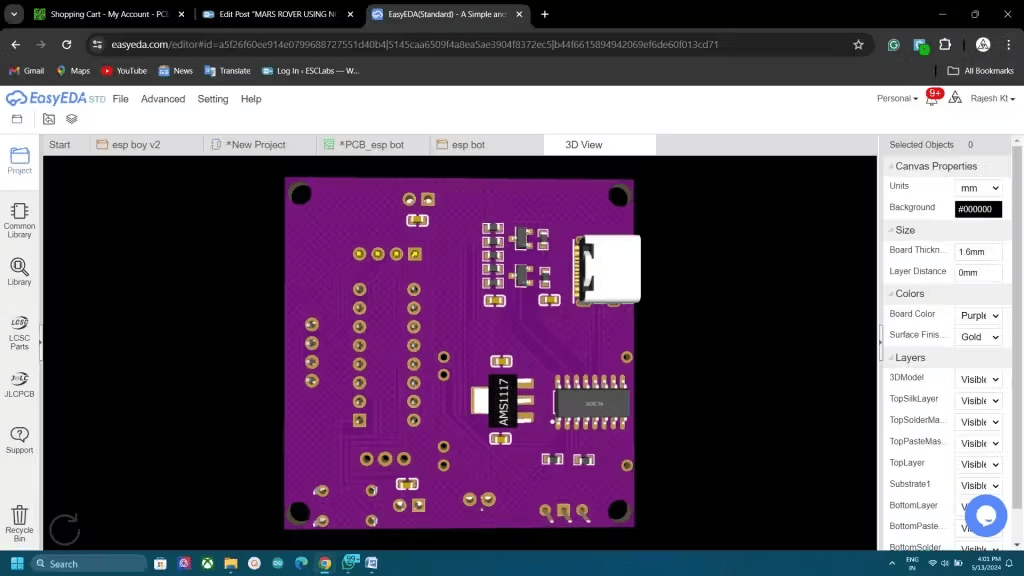
在面包板上使用 NodeMCU 测试和验证电路后,最终确定 PCB 设计。
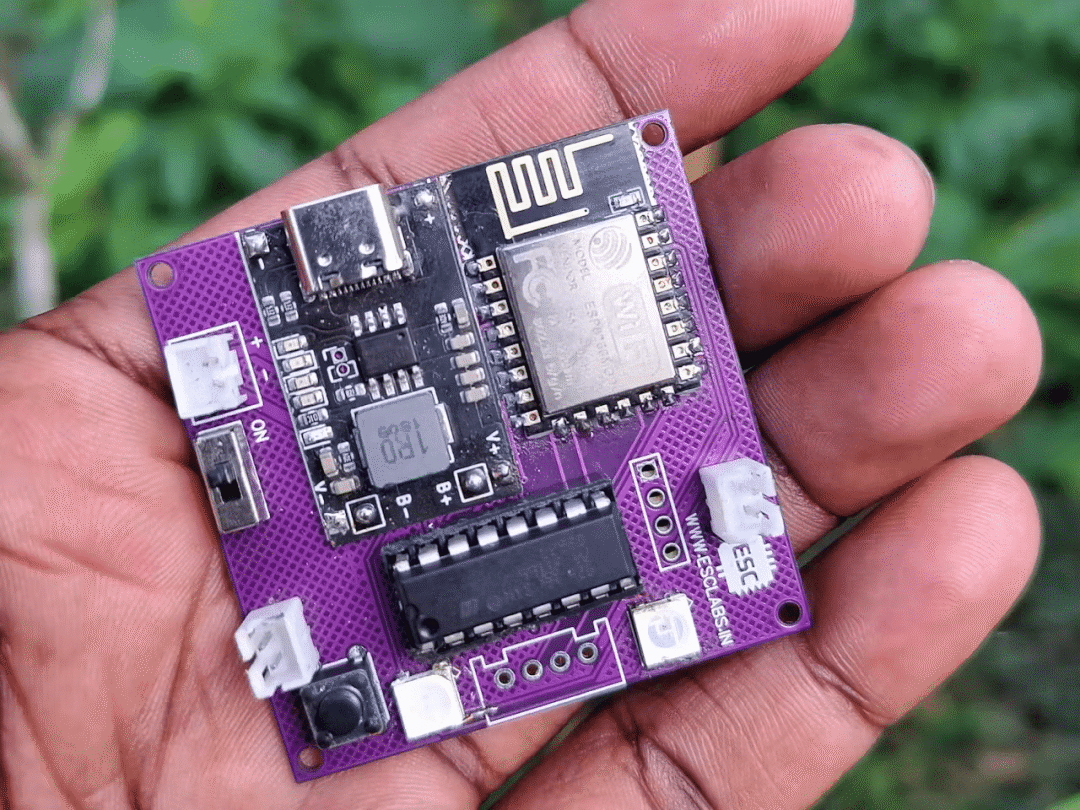
将组件焊接在设计的 PCB 上非常容易,正常30分钟可以搞定。
3D设计与安装
接下来,就是为火星车造个身体了。
3D模型文件下载:
*附件:MARS ROVER USING NODEMCU - 6545945.zip
https://www.thingiverse.com/thing:6545945/files
ESP32代码
接收器代码
#include <ESP8266WiFi.h>
#include <espnow.h>
#include <FastLED.h>
#define NUM_LEDS 2
#define DATA_PIN 0
CRGB leds[NUM_LEDS];
const int motor1a = 2;
const int motor1b = 14;
const int motor2a = 13;
const int motor2b = 12;
uint8_t broadcastAddress[] = {0xAC, 0x0B, 0xFB, 0xCE, 0x8B, 0x16};
String success;
typedef struct struct_message {
int button;
} struct_message;
int IN_button_state;
int OUT_button_state;
struct_message outgoingmsg;
struct_message incomingmsg;
void OnDataSent(uint8_t *mac_addr, uint8_t sendStatus) {
Serial.print("Last Packet Send Status: ");
if (sendStatus == 0){
Serial.println("Delivery success");
}
else{
Serial.println("Delivery fail");
}
}
void OnDataRecv(uint8_t * mac, uint8_t *incomingData, uint8_t len) {
memcpy(&incomingmsg, incomingData, sizeof(outgoingmsg));
Serial.print("Bytes received: ");
Serial.println(len);
IN_button_state = incomingmsg.button;
if (IN_button_state==1){forward();}
if (IN_button_state==2){backward();}
if (IN_button_state==3){turnleft();}
if (IN_button_state==4){turnright();}
if (IN_button_state==5){nomotion();}
}
void getReadings(){
OUT_button_state = analogRead(A0);
delay(100);
Serial.println("OUTGOING MESSAGES");
Serial.println(OUT_button_state);
}
void printIncomingMessage(){
Serial.println("INCOMING MESSAGES");
Serial.println(IN_button_state);
}
void setup() {
FastLED.addLeds<NEOPIXEL, DATA_PIN>(leds, NUM_LEDS);
pinMode(motor1a,OUTPUT);
pinMode(motor1b,OUTPUT);
pinMode(motor2a,OUTPUT);
pinMode(motor2b,OUTPUT);
pinMode(A0,INPUT);
WiFi.mode(WIFI_STA);
WiFi.disconnect();
if (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
return;
}
esp_now_set_self_role(ESP_NOW_ROLE_COMBO);
esp_now_register_send_cb(OnDataSent);
esp_now_add_peer(broadcastAddress, ESP_NOW_ROLE_COMBO, 1, NULL, 0);
esp_now_register_recv_cb(OnDataRecv);
}
void loop() {
getReadings();
outgoingmsg.button = OUT_button_state;
esp_now_send(broadcastAddress, (uint8_t *) &outgoingmsg, sizeof(outgoingmsg));
printIncomingMessage();
}
void forward()
{digitalWrite(motor1a,1);
digitalWrite(motor2a,1);
digitalWrite(motor1b,0);
digitalWrite(motor2b,0);
leds[0] = CRGB::Green;
leds[1] = CRGB::Green;
FastLED.show();
delay(50);
}
void backward()
{digitalWrite(motor1a,0);
digitalWrite(motor2a,0);
digitalWrite(motor1b,1);
digitalWrite(motor2b,1);
leds[0] = CRGB::Red;
leds[1] = CRGB::Red;
FastLED.show();
delay(50);
}
void turnleft()
{digitalWrite(motor1a,1);
digitalWrite(motor2a,0);
digitalWrite(motor1b,0);
digitalWrite(motor2b,1);
leds[0] = CRGB::Green;
FastLED.show();
delay(50);
}
void turnright()
{
digitalWrite(motor1a,0);
digitalWrite(motor2a,1);
digitalWrite(motor1b,1);
digitalWrite(motor2b,0);
leds[1] = CRGB::Green;
FastLED.show();
delay(50);}
void nomotion()
{digitalWrite(motor1a,0);
digitalWrite(motor2a,0);
digitalWrite(motor1b,0);
digitalWrite(motor2b,0);}
发送端代码
#include <ESP8266WiFi.h>
#include <espnow.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
uint8_t broadcastAddress[] = {0xAC, 0x0B, 0xFB, 0xCF, 0x16, 0x91};
String success;
#define upButton 2
#define downButton 14
#define leftButton 13
#define rightButton 12
typedef struct struct_message
{
int button;
}
struct_message;
int IN_button_state;
int OUT_button_state;
struct_message outgoingmsg;
struct_message incomingmsg;
void OnDataSent(uint8_t *mac_addr, uint8_t sendStatus) {
Serial.print("Last Packet Send Status: ");
if (sendStatus == 0){
Serial.println("Delivery success");
}
else{
Serial.println("Delivery fail");
}
}
void OnDataRecv(uint8_t * mac, uint8_t *incomingData, uint8_t len) {
memcpy(&incomingmsg, incomingData, sizeof(outgoingmsg));
Serial.print("Bytes received: ");
Serial.println(len);
IN_button_state = incomingmsg.button;
}
void getReadings(){
if((digitalRead(upButton)==0)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 1;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==0)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 2;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==0)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 3;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==0))
{
OUT_button_state = 4;
}
if((digitalRead(upButton)==1)&&(digitalRead(downButton)==1)&&(digitalRead(leftButton)==1)&&(digitalRead(rightButton)==1))
{
OUT_button_state = 5;
}
}
void setup() {
Serial.begin(115200);
pinMode(upButton,INPUT_PULLUP);
pinMode(downButton,INPUT_PULLUP);
pinMode(leftButton,INPUT_PULLUP);
pinMode(rightButton,INPUT_PULLUP);
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println(F("SSD1306 allocation failed"));
for(;;);
}
WiFi.mode(WIFI_STA);
WiFi.disconnect();
if (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
return;
}
esp_now_set_self_role(ESP_NOW_ROLE_COMBO);
esp_now_register_send_cb(OnDataSent);
esp_now_add_peer(broadcastAddress, ESP_NOW_ROLE_COMBO, 1, NULL, 0);
esp_now_register_recv_cb(OnDataRecv);
}
void printIncomingMessage(){
Serial.println("INCOMING MESSAGES");
Serial.println(IN_button_state);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(10, 20);
display.println("LIGHT: ");
display.setCursor(80, 20);
display.println(IN_button_state);
display.display();
delay(10);
}
void loop() {
getReadings();
outgoingmsg.button = OUT_button_state;
esp_now_send(broadcastAddress, (uint8_t *) &outgoingmsg, sizeof(outgoingmsg));
printIncomingMessage();
}
原文地址:https://www.hackster.io/e_s_c/3d-printeed-mars-rover-using-esp12e-03d609
项目作者:edison science corner
 /6
/6 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 927
927













 淘帖
淘帖





