开源项目作品
为了方便大家更好提升自己,电子发烧友小编为大家整理了一些工程师大佬设计的开源项目作品,供大家可以参考学习,希望对广大工程师有所帮助。
1.用全志R128复刻自平衡赛车机器人,还实现了三种不同的操控方式
经常翻车的朋友们都知道,能在翻车后快速摆正车身的车才是好车。
就像动画《四驱兄弟》中展现的那样,在比赛中需要跟着赛车一起跑圈,而且赛车如果被撞翻还需要重新用手扶正,所浪费的时间非常影响比赛结果。
如果小豪和小烈可以拥有一款能通过发挥R128的WiFi&蓝牙特性的平衡小车,从而能通过WiFi或蓝牙连接的方式进行控制,既可以自平衡和转向,又可以远程操控,那冠军岂不是手到擒来。
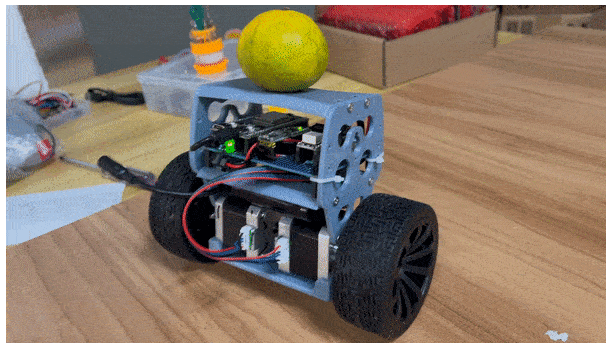

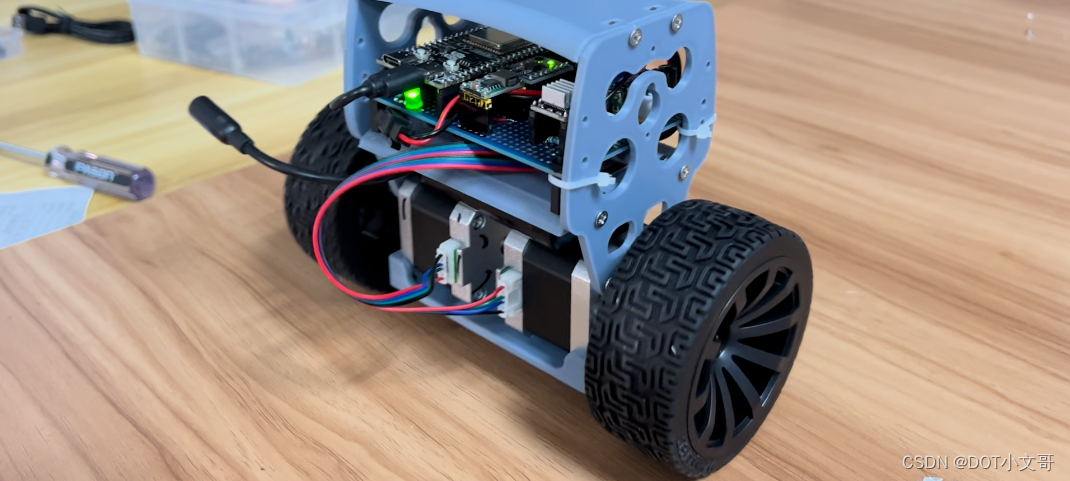
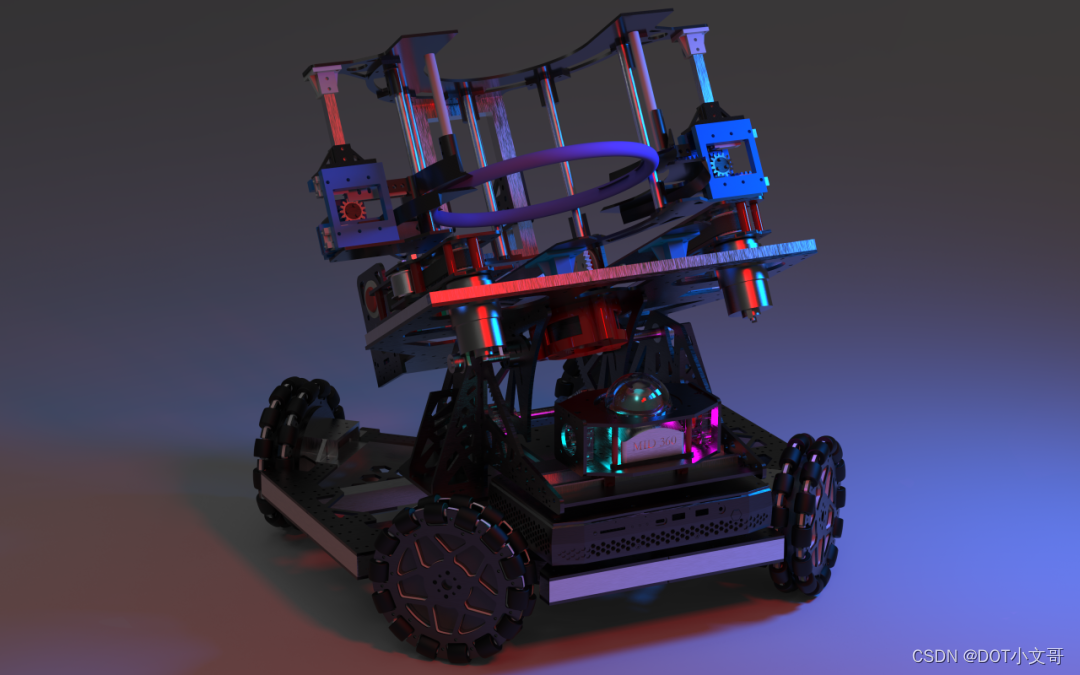
它,就是可以自平衡的赛车机器人——B_ROBOT_100ASK
项目简介
本项目基于jjrobots的开源项目B-ROBOT EVO2进行复刻,与原开源项目不一样的地方是,作者将原本适配的的Arduino控制板移植为DShanMCU-R128s2-DevKit开发板,与此同时还添加了一些功能,比如自平衡功能、WiFi&蓝牙控制、App控制以及语音控制功能,让平衡小车的操控乐趣更上一层楼。
>>>点此查看全文
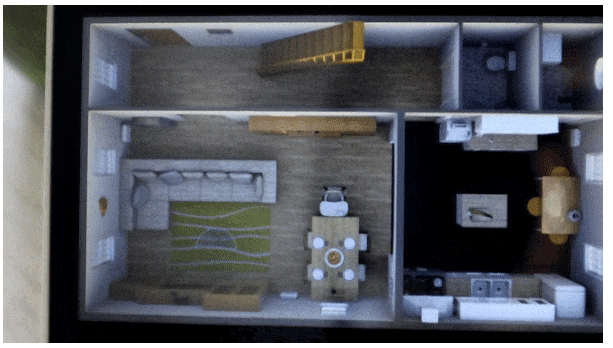
2.开源一个能进行虚拟光渲交互的全志D1s智能家居中控
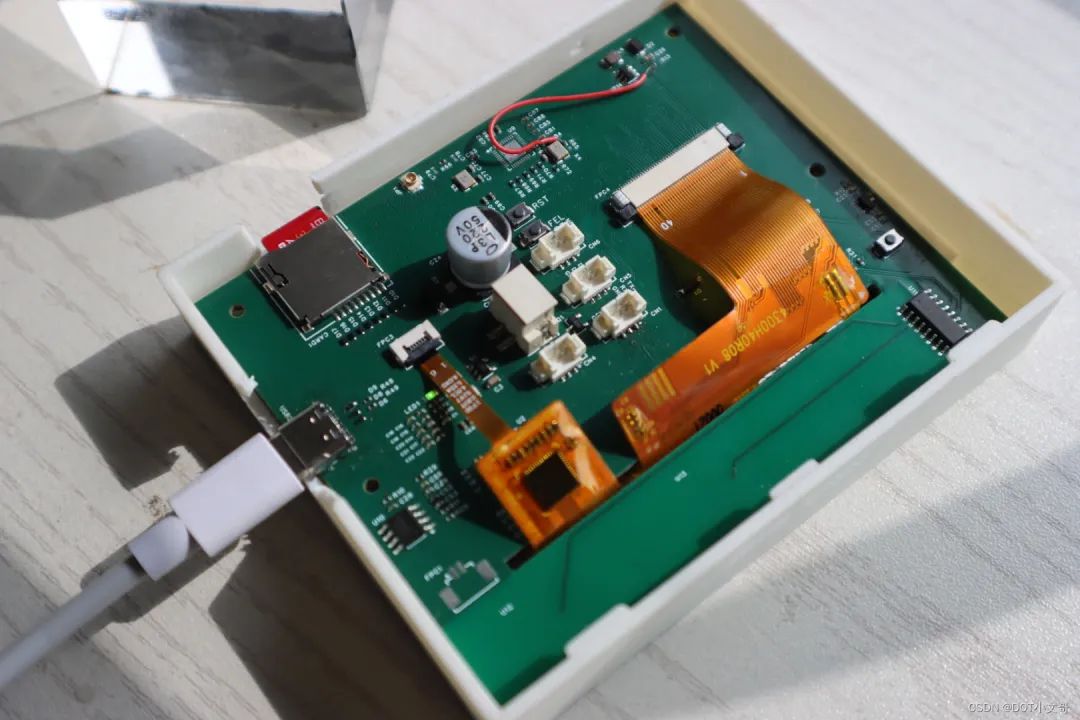
本文所介绍产品demo是开源作品《全志D1s智能家居中控虚拟光渲交互(86盒)》,项目选用RISC-V核心的全志D1s作为主控进行开发,并通过家庭WIFI内网,实现设备间MQTT通信,与其它开源单片机控制项目进行充分联动,旨在推广类似客制化键盘概念到智能家居领域,尝试打破各大厂商对物联网家居的包揽野心和APP的分散的局面,回归到注重用户体验的智能家居本心。
项目简介
项目整体形态以适配86盒安装为基础,使用全志RISC-V核心的D1s芯片作为主控,选择更契合广大房奴的户型的4.3寸长方形屏幕,屏显拉满输出RGB888,搭载全志系的芯之联XR829作为WIFI/BLE模块,多种方式联动。

在开发系统的选择上,作者基于全志最新公开的Melis 4.0实时操作系统进行本项目的开发,并针对Melis 4.0粗糙地适配了LVGL图形库,实现了在性能受限的嵌入式设备上的光照渲染核心技术,致敬homeassistant。
>>>点此查看全文
3.全志XR806基于FreeRTOS下部署竞技机器人先进模糊控制器
前言
很荣幸参与到由全志在线举办的XR806开发板试用活动。本人热衷于各种的开发板的开发,同时更愿意将其实现到具体项目中。
秉承以上原则,发现大家的重心都放在开发中的环境构建过程,缺少了不少实际应用场景的运用,虽然环境搭建确实痛苦。本文主要使用XR806的FreeRTOS到实际的机器人控制应用中,并实现部署模糊控制器。
环境搭建本文简要略写,大家可以看社区其它优秀的文章。文章中应用到的无线控制和多维状态机两个重要的开发应用,会在后面的文章中陆续更新。
使用环境
- 本人使用window10+VMware+ubuntu 18.04 这里不多阐述
- 按照官方文档移植XR806的FreeRTOS
项目介绍
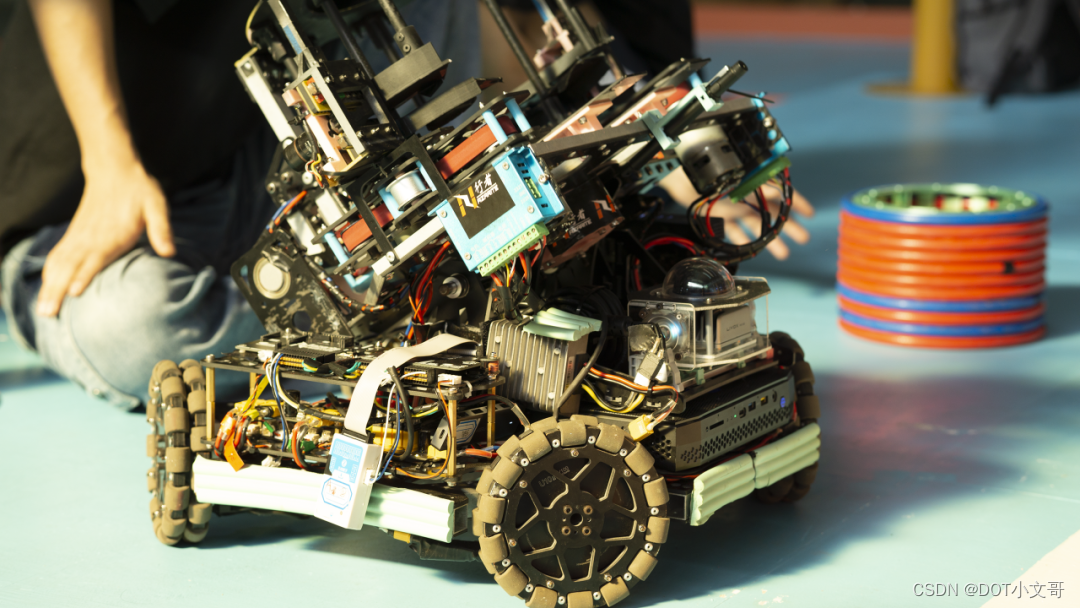
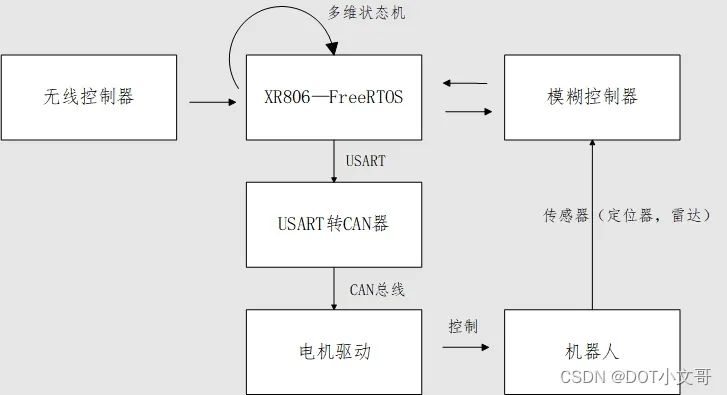
基于XR806——FreeRTOS为项目主控,部署先进模糊控制器,实现对于竞技机器人的机构控制和定位控制等。
软硬件框架
>>>点此查看全文
4.小时候画在手腕上的表,我用全志R128让他真正动了起来
小时候,我们总是充满想象力和创造力。
在那个年龄,我们没有真正的手表,但我们总是喜欢在纸上画出自己的手表,仿佛它真的能告诉我们时间。
为了弥补童年的遗憾,作者找到了一个智能手表的开源项目——NWatch,并把他移植到了R128开发板上。

项目简介
本项目基于ZakKemble的开源项目NWatch,与原作者的NWatch不一样的是,作者将其移植到DShanMCU-R128s2-DevKit开发板的同时相比于原作者添加了一些功能,比如优化屏幕刷新,使显示更流畅,以及添加蜂鸣器、旋转编码器、DHT11温湿度传感器。
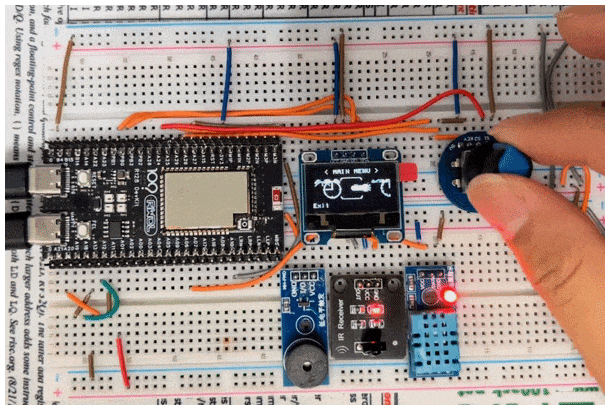
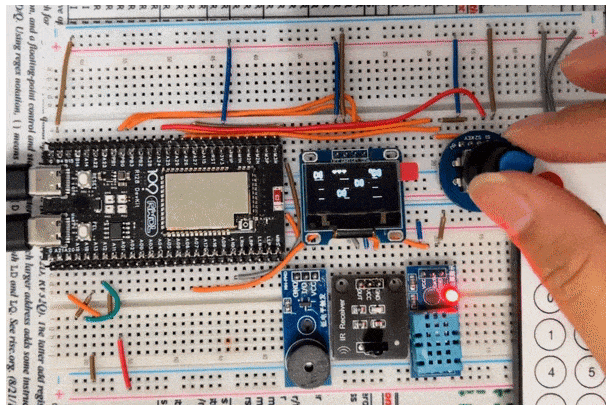
硬件准备
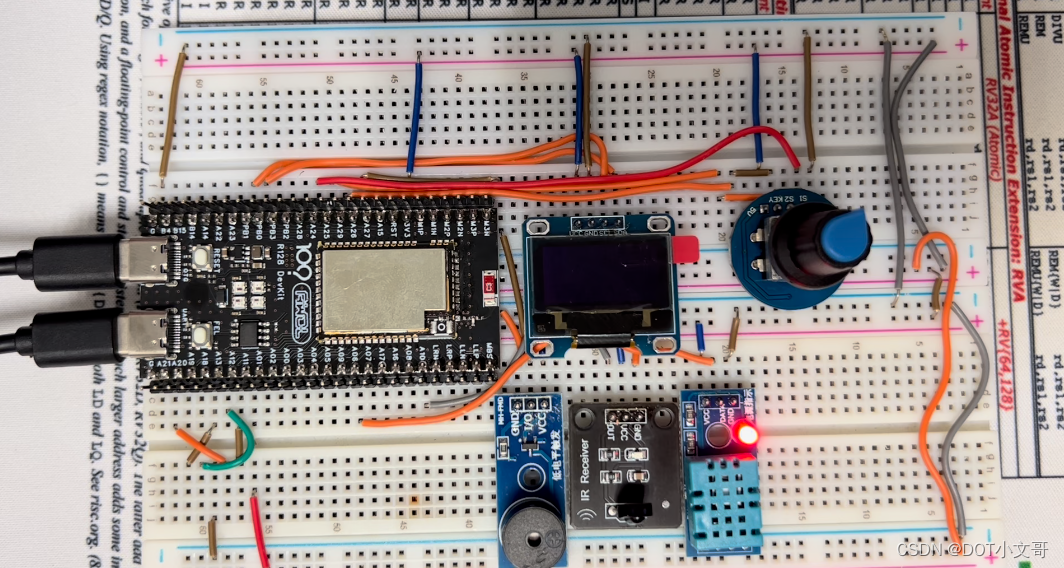
本项目的基础用意是提供一个综合的示例进行学习参考,所以没有将所有硬件集成到一小块开发板上,而是采用面包板来实现手表功能效果,所需要用到的硬件有以下几个:
- DShanMCU-R128s2-DevKit开发板
- 0.96寸OLED(SSD1306)
- EC11旋转编码器模块
- 红外接收模块+红外遥控器
- 无源蜂鸣器模块
- DHT11温湿度模块
>>>点此查看全文
 /9
/9 



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号






 2064
2064














 淘帖
淘帖




