本报告基于瑞萨RA6E2评估板,实现了一个完整的ADC数据采集与显示系统。通过板载ADC通道采集模拟信号,将采集到的数字量通过动态扫描方式在4位数码管上实时显示,展示了RA6E2在模拟信号处理和显示控制方面的强大能力。
| 功能 | RA6E2引脚 | 对应74HC595引脚 | 说明 |
|---|---|---|---|
| 数据线(DIO) | P400 | DS | 串行数据输入 |
| 时钟线(SCLK) | P401 | SHCP | 移位寄存器时钟 |
| 锁存线(RCLK) | P402 | STCP | 存储寄存器时钟 |
| ADC输入 | AN0 | - | 模拟信号输入 |
text
RA6E2开发板 数码管模块
P400 ------> DS (数据)
P401 ------> SHCP (时钟)
P402 ------> STCP (锁存)
3.3V ------> VCC
GND ------> GND
AN0 <------ 电位器中间引脚
使用e2 studio创建新工程,选择R7FA6E2BH芯片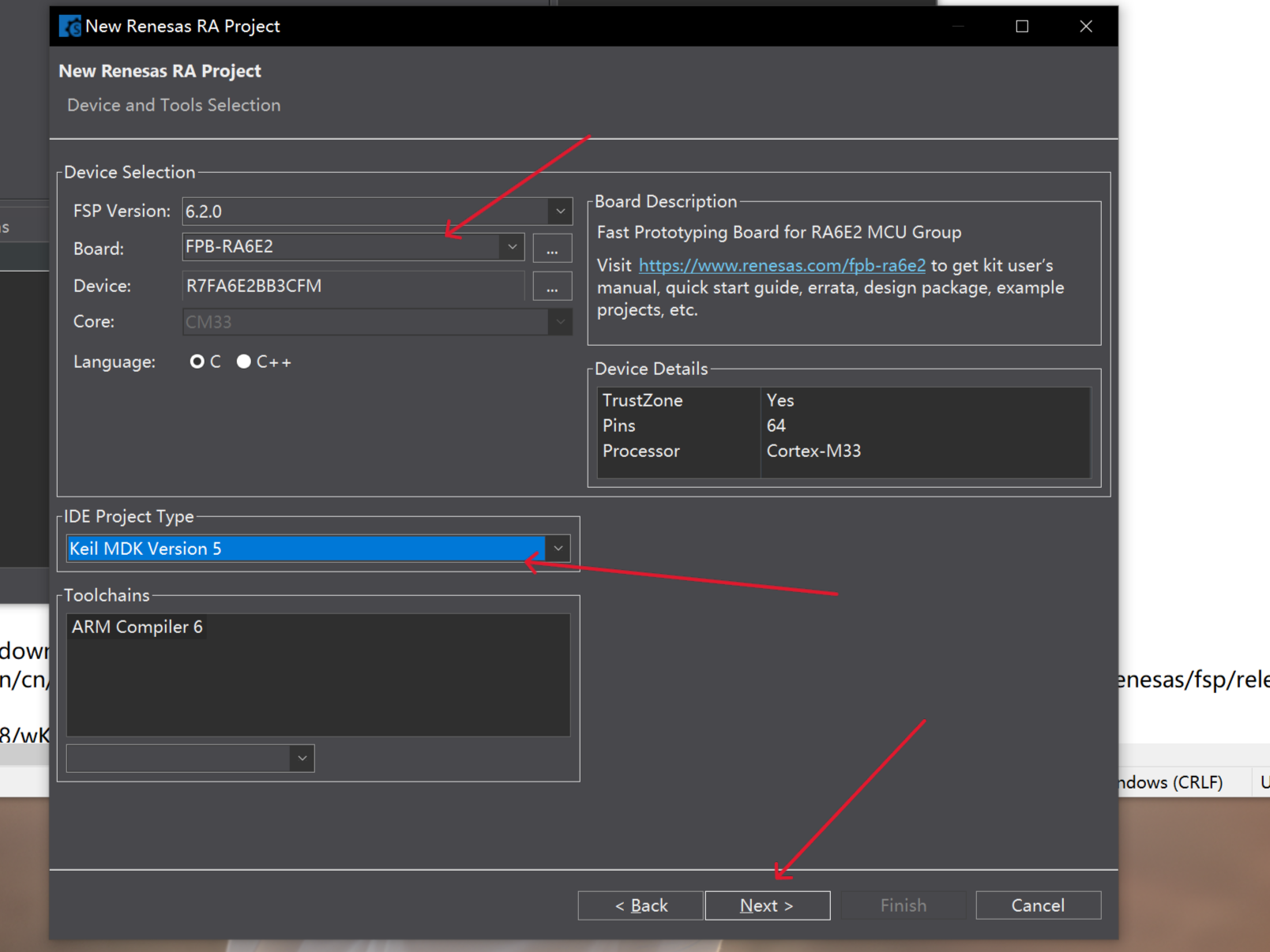
配置ADC模块:
选择ADC通道0
设置12位分辨率


生成工程代码并导入Keil MDK
c
#include "hal_data.h"
/* 数码管驱动引脚定义 */
#define SEG_DIO BSP_IO_PORT_04_PIN_00 // 数据输入引脚
#define SEG_SCLK BSP_IO_PORT_04_PIN_01 // 移位寄存器时钟
#define SEG_RCLK BSP_IO_PORT_04_PIN_02 // 存储寄存器时钟(锁存)
/* 全局变量 */
fsp_err_t err = FSP_SUCCESS;
volatile bool g_scan_complete_flag = false;
uint16_t g_seg_data = 0;
/* 共阳极数码管段码表 (0-9, A-F, '-', 全灭) */
const uint8_t g_seg_table[] = {
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x80, 0x90, // 0-9
0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E, 0xBF, 0xFF // A-F, '-', 全灭
};
/**
* [url=home.php?mod=space&uid=2666770]@Brief[/url] ADC回调函数
* [url=home.php?mod=space&uid=3142012]@param[/url] p_args 回调参数
* [url=home.php?mod=space&uid=1902110]@NOTE[/url] ADC扫描完成时自动调用,设置完成标志
*/
void adc_callback(adc_callback_args_t * p_args)
{
FSP_PARAMETER_NOT_USED(p_args);
g_scan_complete_flag = true;
}
/**
* @brief ADC初始化
* @note 配置并启动ADC模块
*/
void adc_init(void)
{
/* 打开ADC设备 */
err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);
assert(FSP_SUCCESS == err);
/* 配置ADC扫描参数 */
err = R_ADC_ScanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);
assert(FSP_SUCCESS == err);
/* 开始ADC扫描 */
R_ADC_ScanStart(&g_adc0_ctrl);
}
/**
* @brief 读取ADC通道值
* @param channel ADC通道号
* [url=home.php?mod=space&uid=1141835]@Return[/url] ADC转换结果(0-4095)
*/
uint16_t adc_read(adc_channel_t channel)
{
uint16_t adc_value = 0;
/* 等待ADC转换完成 */
g_scan_complete_flag = false;
while (!g_scan_complete_flag)
{
/* 空循环等待中断 */
}
/* 读取ADC转换结果 */
err = R_ADC_Read(&g_adc0_ctrl, channel, &adc_value);
assert(FSP_SUCCESS == err);
return adc_value;
}
/**
* @brief 向数码管发送数据
* @param segment 段码数据
* @param position 位选数据
* @note 使用软件SPI协议控制74HC595
*/
void seg_send_data(uint8_t segment, uint8_t position)
{
uint8_t data[2] = {segment, position};
/* 拉低锁存信号,准备接收数据 */
R_IOPORT_PinWrite(&g_ioport_ctrl, SEG_RCLK, BSP_IO_LEVEL_LOW);
/* 发送两个字节数据 */
for (uint8_t i = 0; i < 2; i++)
{
/* 逐位发送数据 */
for (uint8_t j = 0; j < 8; j++)
{
/* 拉低时钟,准备数据位 */
R_IOPORT_PinWrite(&g_ioport_ctrl, SEG_SCLK, BSP_IO_LEVEL_LOW);
/* 发送数据位(从高位开始) */
bsp_io_level_t bit_level = (data[i] & (0x80 >> j)) ?
BSP_IO_LEVEL_HIGH : BSP_IO_LEVEL_LOW;
R_IOPORT_PinWrite(&g_ioport_ctrl, SEG_DIO, bit_level);
/* 拉高时钟,锁存数据位 */
R_IOPORT_PinWrite(&g_ioport_ctrl, SEG_SCLK, BSP_IO_LEVEL_HIGH);
}
}
/* 拉高锁存信号,输出数据到并行端口 */
R_IOPORT_PinWrite(&g_ioport_ctrl, SEG_RCLK, BSP_IO_LEVEL_HIGH);
}
/**
* @brief 数码管动态扫描显示
* @note 采用动态扫描方式,每次显示一位数字
*/
void seg_display(void)
{
static uint16_t digit_value = 1; // 当前位数权重
static uint8_t digit_position = 0; // 当前显示位置
/* 计算当前位的数字 */
uint8_t number = (g_seg_data / digit_value) % 10;
/* 在第2位(从0开始)显示小数点 */
uint8_t segment_data = (digit_position == 1) ?
(g_seg_table[number] & 0x7F) : g_seg_table[number];
/* 位选信号(共阳极,低电平选中) */
uint8_t position_data = (uint8_t)(1 << digit_position);
/* 发送显示数据 */
seg_send_data(segment_data, position_data);
/* 更新显示位置和位数权重 */
digit_position = (digit_position + 1) % 4;
digit_value = (digit_position == 0) ? 1 : digit_value * 10;
}
/**
* @brief 主程序入口
*/
void hal_entry(void)
{
/* 初始化数码管控制引脚 */
R_IOPORT_PinCfg(&g_ioport_ctrl, SEG_DIO,
IOPORT_CFG_PORT_DIRECTION_OUTPUT);
R_IOPORT_PinCfg(&g_ioport_ctrl, SEG_SCLK,
IOPORT_CFG_PORT_DIRECTION_OUTPUT);
R_IOPORT_PinCfg(&g_ioport_ctrl, SEG_RCLK,
IOPORT_CFG_PORT_DIRECTION_OUTPUT);
/* 初始化ADC */
adc_init();
/* 主循环 */
while (1)
{
static uint32_t adc_sample_counter = 0;
/* 每1000次显示刷新采样一次ADC(软件定时) */
if (++adc_sample_counter >= 1000)
{
adc_sample_counter = 0;
/* 读取ADC并转换为电压值(0-330对应0-3.30V) */
uint16_t adc_raw = adc_read(ADC_CHANNEL_0);
g_seg_data = adc_raw * 330 / 4095;
}
/* 刷新数码管显示 */
seg_display();
/* 短暂延时,控制刷新频率 */
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS);
}
}

更多回帖

