rt-thread LAN8720A+F407 100M连接,开机ping外网都正常, 一段时间后变成10M和半双工
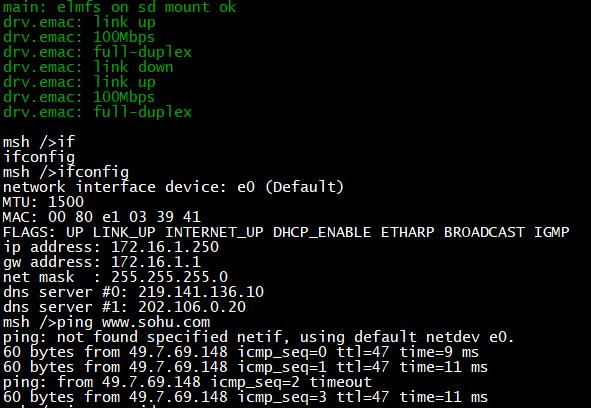
然后一段时间后,可能一小时,可能半小时,会出现link down信息,网络就变成10M和半双工了,此时再ping就不行了


不知道是驱动问题还是协议栈有啥问题
下面是drv_eth.c,基本没有改动 rtt5.1.0版本
- /*
- * Copyright (c) 2006-2021, RT-Thread Development Team
- *
- * SPDX-License-Identifier: Apache-2.0
- *
- * Change Logs:
- * Date Author Notes
- * 2018-11-19 SummerGift first version
- * 2018-12-25 zylx fix some bugs
- * 2019-06-10 SummerGift optimize PHY state detection process
- * 2019-09-03 xiaofan optimize link change detection process
- */
- #include
- #ifdef BSP_USING_ETH
- #include "drv_config.h"
- #include "drv_eth.h"
- #include
- #include
- /*
- * Emac driver uses CubeMX tool to generate emac and phy's configuration,
- * the configuration files can be found in CubeMX_Config folder.
- */
- /* debug option */
- //#define ETH_RX_DUMP
- //#define ETH_TX_DUMP
- //#define DRV_DEBUG
- #define LOG_TAG "drv.emac"
- #include
- #define MAX_ADDR_LEN 6
- struct rt_STM32_eth
- {
- /* inherit from ethernet device */
- struct eth_device parent;
- #ifndef PHY_USING_INTERRUPT_MODE
- rt_timer_t poll_link_timer;
- #endif
- /* interface address info, hw address */
- rt_uint8_t dev_addr[MAX_ADDR_LEN];
- /* ETH_Speed */
- rt_uint32_t ETH_Speed;
- /* ETH_Duplex_Mode */
- rt_uint32_t ETH_Mode;
- };
- static ETH_DMADescTypeDef *DMARxDscrTab, *DMATxDscrTab;
- static rt_uint8_t *Rx_Buff, *Tx_Buff;
- static ETH_HandleTypeDef EthHandle;
- static struct rt_stm32_eth stm32_eth_device;
- #if defined(ETH_RX_DUMP) || defined(ETH_TX_DUMP)
- #define __is_print(ch) ((unsigned int)((ch) - ' ') < 127u - ' ')
- static void dump_hex(const rt_uint8_t *ptr, rt_size_t buflen)
- {
- unsigned char *buf = (unsigned char *)ptr;
- int i, j;
- for (i = 0; i < buflen; i += 16)
- {
- rt_kprintf("%08X: ", i);
- for (j = 0; j < 16; j++)
- if (i + j < buflen)
- rt_kprintf("%02X ", buf[i + j]);
- else
- rt_kprintf(" ");
- rt_kprintf(" ");
- for (j = 0; j < 16; j++)
- if (i + j < buflen)
- rt_kprintf("%c", __is_print(buf[i + j]) ? buf[i + j] : '.');
- rt_kprintf("n");
- }
- }
- #endif
- extern void phy_reset(void);
- /* EMAC initialization function */
- static rt_err_t rt_stm32_eth_init(rt_device_t dev)
- {
- __HAL_RCC_ETH_CLK_ENABLE();
- phy_reset();
- /* ETHERNET Configuration */
- EthHandle.Instance = ETH;
- EthHandle.Init.MACAddr = (rt_uint8_t *)&stm32_eth_device.dev_addr[0];
- EthHandle.Init.AutoNegotiation = ETH_AUTONEGOTIATION_DISABLE;
- EthHandle.Init.Speed = ETH_SPEED_100M;
- EthHandle.Init.DuplexMode = ETH_MODE_FULLDUPLEX;
- EthHandle.Init.MediaInterface = ETH_MEDIA_INTERFACE_RMII;
- EthHandle.Init.RxMode = ETH_RXINTERRUPT_MODE;
- #ifdef RT_LWIP_USING_HW_CHECKSUM
- EthHandle.Init.ChecksumMode = ETH_CHECKSUM_BY_HARDWARE;
- #else
- EthHandle.Init.ChecksumMode = ETH_CHECKSUM_BY_SOFTWARE;
- #endif
- HAL_ETH_DeInit(&EthHandle);
- /* configure ethernet peripheral (GPIOs, clocks, MAC, DMA) */
- if (HAL_ETH_Init(&EthHandle) != HAL_OK)
- {
- LOG_E("eth hardware init failed");
- }
- else
- {
- LOG_D("eth hardware init success");
- }
- /* Initialize Tx Descriptors list: Chain Mode */
- HAL_ETH_DMATxDescListInit(&EthHandle, DMATxDscrTab, Tx_Buff, ETH_TXBUFNB);
- /* Initialize Rx Descriptors list: Chain Mode */
- HAL_ETH_DMARxDescListInit(&EthHandle, DMARxDscrTab, Rx_Buff, ETH_RXBUFNB);
- /* ETH interrupt Init */
- HAL_NVIC_SetPriority(ETH_IRQn, 0x07, 0);
- HAL_NVIC_EnableIRQ(ETH_IRQn);
- /* Enable MAC and DMA transmission and reception */
- if (HAL_ETH_Start(&EthHandle) == HAL_OK)
- {
- LOG_D("emac hardware start");
- }
- else
- {
- LOG_E("emac hardware start faild");
- return -RT_ERROR;
- }
- return RT_EOK;
- }
- static rt_err_t rt_stm32_eth_open(rt_device_t dev, rt_uint16_t oflag)
- {
- LOG_D("emac open");
- return RT_EOK;
- }
- static rt_err_t rt_stm32_eth_close(rt_device_t dev)
- {
- LOG_D("emac close");
- return RT_EOK;
- }
- static rt_size_t rt_stm32_eth_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size)
- {
- LOG_D("emac read");
- rt_set_errno(-RT_ENOSYS);
- return 0;
- }
- static rt_size_t rt_stm32_eth_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size)
- {
- LOG_D("emac write");
- rt_set_errno(-RT_ENOSYS);
- return 0;
- }
- static rt_err_t rt_stm32_eth_control(rt_device_t dev, int cmd, void *args)
- {
- switch (cmd)
- {
- case NIOCTL_GADDR:
- /* get mac address */
- if (args)
- {
- SMEMCPY(args, stm32_eth_device.dev_addr, 6);
- }
- else
- {
- return -RT_ERROR;
- }
- break;
- default :
- break;
- }
- return RT_EOK;
- }
- /* ethernet device interface */
- /* transmit data*/
- rt_err_t rt_stm32_eth_tx(rt_device_t dev, struct pbuf *p)
- {
- rt_err_t ret = RT_ERROR;
- HAL_StatusTypeDef state;
- struct pbuf *q;
- uint8_t *buffer = (uint8_t *)(EthHandle.TxDesc->Buffer1Addr);
- __IO ETH_DMADescTypeDef *DmaTxDesc;
- uint32_t framelength = 0;
- uint32_t bufferoffset = 0;
- uint32_t byteslefttocopy = 0;
- uint32_t payloadoffset = 0;
- DmaTxDesc = EthHandle.TxDesc;
- bufferoffset = 0;
- /* copy frame from pbufs to driver buffers */
- for (q = p; q != NULL; q = q->next)
- {
- /* Is this buffer available? If not, goto error */
- if ((DmaTxDesc->Status & ETH_DMATXDESC_OWN) != (uint32_t)RESET)
- {
- LOG_D("buffer not valid");
- ret = ERR_USE;
- goto error;
- }
- /* Get bytes in current lwIP buffer */
- byteslefttocopy = q->len;
- payloadoffset = 0;
- /* Check if the length of data to copy is bigger than Tx buffer size*/
- while ((byteslefttocopy + bufferoffset) > ETH_TX_BUF_SIZE)
- {
- /* Copy data to Tx buffer*/
- SMEMCPY((uint8_t *)((uint8_t *)buffer + bufferoffset), (uint8_t *)((uint8_t *)q->payload + payloadoffset), (ETH_TX_BUF_SIZE - bufferoffset));
- /* Point to next descriptor */
- DmaTxDesc = (ETH_DMADescTypeDef *)(DmaTxDesc->Buffer2NextDescAddr);
- /* Check if the buffer is available */
- if ((DmaTxDesc->Status & ETH_DMATXDESC_OWN) != (uint32_t)RESET)
- {
- LOG_E("dma tx desc buffer is not valid");
- ret = ERR_USE;
- goto error;
- }
- buffer = (uint8_t *)(DmaTxDesc->Buffer1Addr);
- byteslefttocopy = byteslefttocopy - (ETH_TX_BUF_SIZE - bufferoffset);
- payloadoffset = payloadoffset + (ETH_TX_BUF_SIZE - bufferoffset);
- framelength = framelength + (ETH_TX_BUF_SIZE - bufferoffset);
- bufferoffset = 0;
- }
- /* Copy the remaining bytes */
- SMEMCPY((uint8_t *)((uint8_t *)buffer + bufferoffset), (uint8_t *)((uint8_t *)q->payload + payloadoffset), byteslefttocopy);
- bufferoffset = bufferoffset + byteslefttocopy;
- framelength = framelength + byteslefttocopy;
- }
- #ifdef ETH_TX_DUMP
- dump_hex(buffer, p->tot_len);
- #endif
- /* Prepare transmit descriptors to give to DMA */
- /* TODO Optimize data send speed*/
- LOG_D("transmit frame length :%d", framelength);
- /* wait for unlocked */
- while (EthHandle.Lock == HAL_LOCKED);
- state = HAL_ETH_TransmitFrame(&EthHandle, framelength);
- if (state != HAL_OK)
- {
- LOG_E("eth transmit frame faild: %d", state);
- }
- ret = ERR_OK;
- error:
- /* When Transmit Underflow flag is set, clear it and issue a Transmit Poll Demand to resume transmission */
- if ((EthHandle.Instance->DMASR & ETH_DMASR_TUS) != (uint32_t)RESET)
- {
- /* Clear TUS ETHERNET DMA flag */
- EthHandle.Instance->DMASR = ETH_DMASR_TUS;
- /* Resume DMA transmission*/
- EthHandle.Instance->DMATPDR = 0;
- }
- return ret;
- }
- /* receive data*/
- struct pbuf *rt_stm32_eth_rx(rt_device_t dev)
- {
- struct pbuf *p = NULL;
- struct pbuf *q = NULL;
- HAL_StatusTypeDef state;
- uint16_t len = 0;
- uint8_t *buffer;
- __IO ETH_DMADescTypeDef *dmarxdesc;
- uint32_t bufferoffset = 0;
- uint32_t payloadoffset = 0;
- uint32_t byteslefttocopy = 0;
- uint32_t i = 0;
- /* Get received frame */
- state = HAL_ETH_GetReceivedFrame_IT(&EthHandle);
- if (state != HAL_OK)
- {
- LOG_D("receive frame faild");
- return NULL;
- }
- /* Obtain the size of the packet and put it into the "len" variable. */
- len = EthHandle.RxFrameInfos.length;
- buffer = (uint8_t *)EthHandle.RxFrameInfos.buffer;
- LOG_D("receive frame len : %d", len);
- if (len > 0)
- {
- /* We allocate a pbuf chain of pbufs from the Lwip buffer pool */
- p = pbuf_alloc(PBUF_RAW, len, PBUF_POOL);
- }
- #ifdef ETH_RX_DUMP
- dump_hex(buffer, p->tot_len);
- #endif
- if (p != NULL)
- {
- dmarxdesc = EthHandle.RxFrameInfos.FSRxDesc;
- bufferoffset = 0;
- for (q = p; q != NULL; q = q->next)
- {
- byteslefttocopy = q->len;
- payloadoffset = 0;
- /* Check if the length of bytes to copy in current pbuf is bigger than Rx buffer size*/
- while ((byteslefttocopy + bufferoffset) > ETH_RX_BUF_SIZE)
- {
- /* Copy data to pbuf */
- SMEMCPY((uint8_t *)((uint8_t *)q->payload + payloadoffset), (uint8_t *)((uint8_t *)buffer + bufferoffset), (ETH_RX_BUF_SIZE - bufferoffset));
- /* Point to next descriptor */
- dmarxdesc = (ETH_DMADescTypeDef *)(dmarxdesc->Buffer2NextDescAddr);
- buffer = (uint8_t *)(dmarxdesc->Buffer1Addr);
- byteslefttocopy = byteslefttocopy - (ETH_RX_BUF_SIZE - bufferoffset);
- payloadoffset = payloadoffset + (ETH_RX_BUF_SIZE - bufferoffset);
- bufferoffset = 0;
- }
- /* Copy remaining data in pbuf */
- SMEMCPY((uint8_t *)((uint8_t *)q->payload + payloadoffset), (uint8_t *)((uint8_t *)buffer + bufferoffset), byteslefttocopy);
- bufferoffset = bufferoffset + byteslefttocopy;
- }
- }
- /* Release descriptors to DMA */
- /* Point to first descriptor */
- dmarxdesc = EthHandle.RxFrameInfos.FSRxDesc;
- /* Set Own bit in Rx descriptors: gives the buffers back to DMA */
- for (i = 0; i < EthHandle.RxFrameInfos.SegCount; i++)
- {
- dmarxdesc->Status |= ETH_DMARXDESC_OWN;
- dmarxdesc = (ETH_DMADescTypeDef *)(dmarxdesc->Buffer2NextDescAddr);
- }
- /* Clear Segment_Count */
- EthHandle.RxFrameInfos.SegCount = 0;
- /* When Rx Buffer unavailable flag is set: clear it and resume reception */
- if ((EthHandle.Instance->DMASR & ETH_DMASR_RBUS) != (uint32_t)RESET)
- {
- /* Clear RBUS ETHERNET DMA flag */
- EthHandle.Instance->DMASR = ETH_DMASR_RBUS;
- /* Resume DMA reception */
- EthHandle.Instance->DMARPDR = 0;
- }
- return p;
- }
- /* interrupt service routine */
- void ETH_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_ETH_IRQHandler(&EthHandle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- void HAL_ETH_RxCpltCallback(ETH_HandleTypeDef *heth)
- {
- rt_err_t result;
- result = eth_device_ready(&(stm32_eth_device.parent));
- if (result != RT_EOK)
- {
- LOG_I("RxCpltCallback err = %d", result);
- }
- }
- void HAL_ETH_ErrorCallback(ETH_HandleTypeDef *heth)
- {
- LOG_E("eth err");
- }
- enum {
- PHY_LINK = (1 << 0),
- PHY_100M = (1 << 1),
- PHY_FULL_DUPLEX = (1 << 2),
- };
- static void phy_linkchange()
- {
- static rt_uint8_t phy_speed = 0;
- rt_uint8_t phy_speed_new = 0;
- rt_uint32_t status;
- HAL_ETH_ReadPHYRegister(&EthHandle, PHY_BASIC_STATUS_REG, (uint32_t *)&status);
- LOG_D("phy basic status reg is 0x%X", status);
- if (status & (PHY_AUTONEGO_COMPLETE_MASK | PHY_LINKED_STATUS_MASK))
- {
- rt_uint32_t SR = 0;
- phy_speed_new |= PHY_LINK;
- HAL_ETH_ReadPHYRegister(&EthHandle, PHY_Status_REG, (uint32_t *)&SR);
- LOG_D("phy control status reg is 0x%X", SR);
- if (PHY_Status_SPEED_100M(SR))
- {
- phy_speed_new |= PHY_100M;
- }
- if (PHY_Status_FULL_DUPLEX(SR))
- {
- phy_speed_new |= PHY_FULL_DUPLEX;
- }
- }
- if (phy_speed != phy_speed_new)
- {
- phy_speed = phy_speed_new;
- if (phy_speed & PHY_LINK)
- {
- LOG_I("link up");
- if (phy_speed & PHY_100M)
- {
- LOG_I("100Mbps");
- stm32_eth_device.ETH_Speed = ETH_SPEED_100M;
- }
- else
- {
- stm32_eth_device.ETH_Speed = ETH_SPEED_10M;
- LOG_I("10Mbps");
- }
- if (phy_speed & PHY_FULL_DUPLEX)
- {
- LOG_I("full-duplex");
- stm32_eth_device.ETH_Mode = ETH_MODE_FULLDUPLEX;
- }
- else
- {
- LOG_I("half-duplex");
- stm32_eth_device.ETH_Mode = ETH_MODE_HALFDUPLEX;
- }
- /* send link up. */
- eth_device_linkchange(&stm32_eth_device.parent, RT_TRUE);
- }
- else
- {
- LOG_I("link down");
- eth_device_linkchange(&stm32_eth_device.parent, RT_FALSE);
- }
- }
- }
- #ifdef PHY_USING_INTERRUPT_MODE
- static void eth_phy_isr(void *args)
- {
- rt_uint32_t status = 0;
- HAL_ETH_ReadPHYRegister(&EthHandle, PHY_INTERRUPT_FLAG_REG, (uint32_t *)&status);
- LOG_D("phy interrupt status reg is 0x%X", status);
- phy_linkchange();
- }
- #endif /* PHY_USING_INTERRUPT_MODE */
- static void phy_monitor_thread_entry(void *parameter)
- {
- uint8_t phy_addr = 0xFF;
- uint8_t detected_count = 0;
- while(phy_addr == 0xFF)
- {
- /* phy search */
- rt_uint32_t i, temp;
- for (i = 0; i <= 0x1F; i++)
- {
- EthHandle.Init.PhyAddress = i;
- HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ID1_REG, (uint32_t *)&temp);
- if (temp != 0xFFFF && temp != 0x00)
- {
- phy_addr = i;
- break;
- }
- }
- detected_count++;
- rt_thread_mdelay(1000);
- if (detected_count > 10)
- {
- LOG_E("No PHY device was detected, please check hardware!");
- }
- }
- LOG_D("Found a phy, address:0x%02X", phy_addr);
- /* RESET PHY */
- LOG_D("RESET PHY!");
- HAL_ETH_WritePHYRegister(&EthHandle, PHY_BASIC_CONTROL_REG, PHY_RESET_MASK);
- rt_thread_mdelay(2000);
- HAL_ETH_WritePHYRegister(&EthHandle, PHY_BASIC_CONTROL_REG, PHY_AUTO_NEGOTIATION_MASK);
- phy_linkchange();
- #ifdef PHY_USING_INTERRUPT_MODE
- /* configuration intterrupt pin */
- rt_pin_mode(PHY_INT_PIN, PIN_MODE_INPUT_PULLUP);
- rt_pin_attach_irq(PHY_INT_PIN, PIN_IRQ_MODE_FALLING, eth_phy_isr, (void *)"callbackargs");
- rt_pin_irq_enable(PHY_INT_PIN, PIN_IRQ_ENABLE);
- /* enable phy interrupt */
- HAL_ETH_WritePHYRegister(&EthHandle, PHY_INTERRUPT_MASK_REG, PHY_INT_MASK);
- #if defined(PHY_INTERRUPT_CTRL_REG)
- HAL_ETH_WritePHYRegister(&EthHandle, PHY_INTERRUPT_CTRL_REG, PHY_INTERRUPT_EN);
- #endif
- #else /* PHY_USING_INTERRUPT_MODE */
- stm32_eth_device.poll_link_timer = rt_timer_create("phylnk", (void (*)(void*))phy_linkchange,
- NULL, RT_TICK_PER_SECOND, RT_TIMER_FLAG_PERIODIC);
- if (!stm32_eth_device.poll_link_timer || rt_timer_start(stm32_eth_device.poll_link_timer) != RT_EOK)
- {
- LOG_E("Start link change detection timer failed");
- }
- #endif /* PHY_USING_INTERRUPT_MODE */
- }
- /* Register the EMAC device */
- static int rt_hw_stm32_eth_init(void)
- {
- rt_err_t state = RT_EOK;
- /* Prepare receive and send buffers */
- Rx_Buff = (rt_uint8_t *)rt_calloc(ETH_RXBUFNB, ETH_MAX_PACKET_SIZE);
- if (Rx_Buff == RT_NULL)
- {
- LOG_E("No memory");
- state = -RT_ENOMEM;
- goto __exit;
- }
- Tx_Buff = (rt_uint8_t *)rt_calloc(ETH_TXBUFNB, ETH_MAX_PACKET_SIZE);
- if (Tx_Buff == RT_NULL)
- {
- LOG_E("No memory");
- state = -RT_ENOMEM;
- goto __exit;
- }
- DMARxDscrTab = (ETH_DMADescTypeDef *)rt_calloc(ETH_RXBUFNB, sizeof(ETH_DMADescTypeDef));
- if (DMARxDscrTab == RT_NULL)
- {
- LOG_E("No memory");
- state = -RT_ENOMEM;
- goto __exit;
- }
- DMATxDscrTab = (ETH_DMADescTypeDef *)rt_calloc(ETH_TXBUFNB, sizeof(ETH_DMADescTypeDef));
- if (DMATxDscrTab == RT_NULL)
- {
- LOG_E("No memory");
- state = -RT_ENOMEM;
- goto __exit;
- }
- stm32_eth_device.ETH_Speed = ETH_SPEED_100M;
- stm32_eth_device.ETH_Mode = ETH_MODE_FULLDUPLEX;
- /* OUI 00-80-E1 STMICROELECTRONICS. */
- stm32_eth_device.dev_addr[0] = 0x00;
- stm32_eth_device.dev_addr[1] = 0x80;
- stm32_eth_device.dev_addr[2] = 0xE1;
- /* generate MAC addr from 96bit unique ID (only for test). */
- stm32_eth_device.dev_addr[3] = *(rt_uint8_t *)(UID_BASE + 4);
- stm32_eth_device.dev_addr[4] = *(rt_uint8_t *)(UID_BASE + 2);
- stm32_eth_device.dev_addr[5] = *(rt_uint8_t *)(UID_BASE + 0);
- stm32_eth_device.parent.parent.init = rt_stm32_eth_init;
- stm32_eth_device.parent.parent.open = rt_stm32_eth_open;
- stm32_eth_device.parent.parent.close = rt_stm32_eth_close;
- stm32_eth_device.parent.parent.read = rt_stm32_eth_read;
- stm32_eth_device.parent.parent.write = rt_stm32_eth_write;
- stm32_eth_device.parent.parent.control = rt_stm32_eth_control;
- stm32_eth_device.parent.parent.user_data = RT_NULL;
- stm32_eth_device.parent.eth_rx = rt_stm32_eth_rx;
- stm32_eth_device.parent.eth_tx = rt_stm32_eth_tx;
- /* register eth device */
- state = eth_device_init(&(stm32_eth_device.parent), "e0");
- if (RT_EOK == state)
- {
- LOG_D("emac device init success");
- }
- else
- {
- LOG_E("emac device init faild: %d", state);
- state = -RT_ERROR;
- goto __exit;
- }
- /* start phy monitor */
- rt_thread_t tid;
- tid = rt_thread_create("phy",
- phy_monitor_thread_entry,
- RT_NULL,
- 1024,
- RT_THREAD_PRIORITY_MAX - 2,
- 2);
- if (tid != RT_NULL)
- {
- rt_thread_startup(tid);
- }
- else
- {
- state = -RT_ERROR;
- }
- __exit:
- if (state != RT_EOK)
- {
- if (Rx_Buff)
- {
- rt_free(Rx_Buff);
- }
- if (Tx_Buff)
- {
- rt_free(Tx_Buff);
- }
- if (DMARxDscrTab)
- {
- rt_free(DMARxDscrTab);
- }
- if (DMATxDscrTab)
- {
- rt_free(DMATxDscrTab);
- }
- }
- return state;
- }
- INIT_DEVICE_EXPORT(rt_hw_stm32_eth_init);
- #endif




