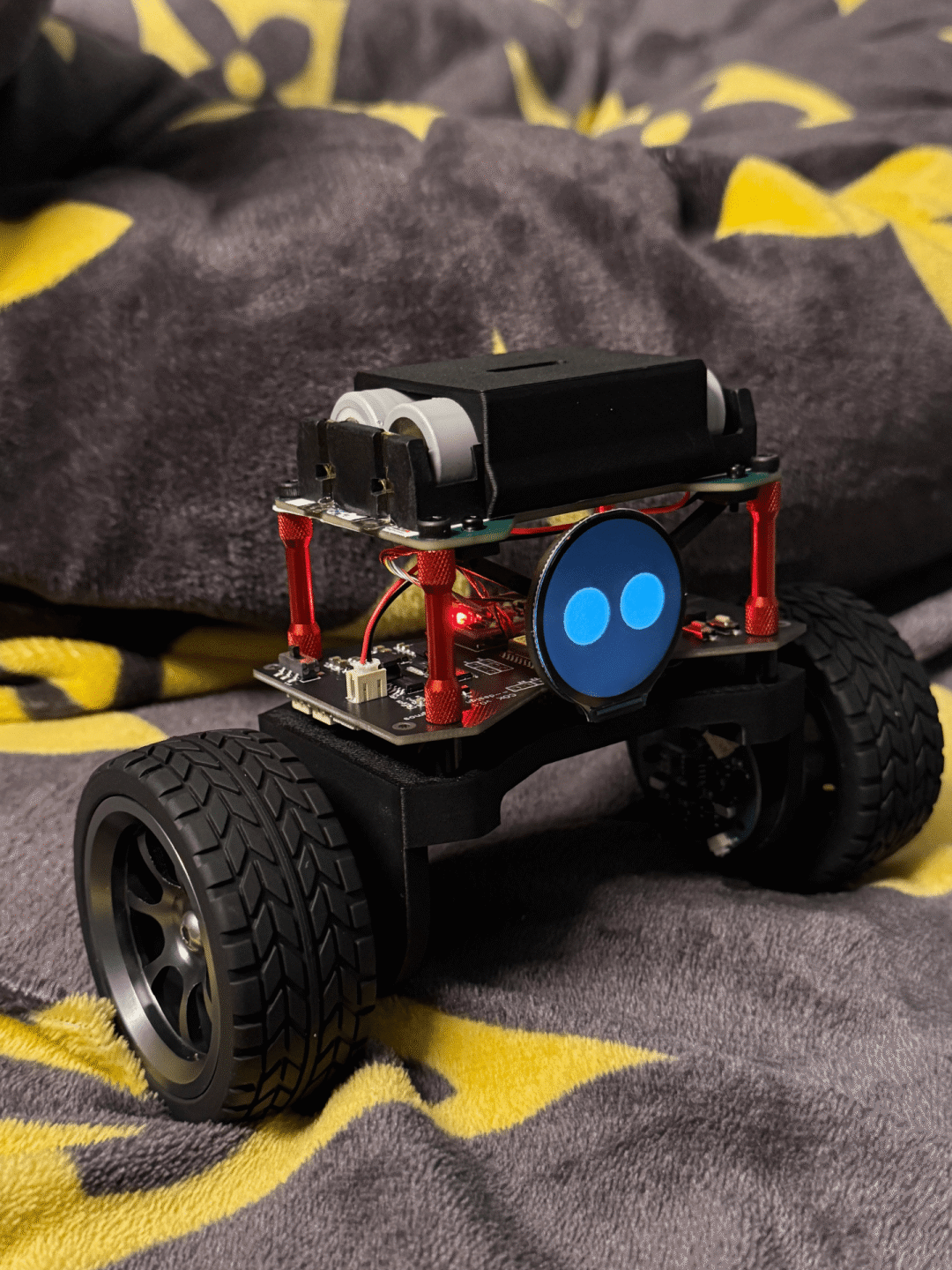
今天给大家介绍一款创意桌面机器人——D-BOT!它不仅是一个功能强大的平衡车机器人,也是一个融合了AI控制、3D建模与PCB设计的开源项目。
D-BOT 被作者称为“小探险家”(Discovery Bot),象征着对未知世界的探索,也承载了创客对自我突破的追求。

D-BOT 集成了多项技术,给小伙伴们提供了丰富的玩法和扩展空间:
全功能 X-Knob^[1]^ 支持:无缝兼容 X-Knob 的所有功能,带来精准的运动控制体验。
蓝牙手柄遥控:通过蓝牙连接手柄,轻松实现远程操控,操作更灵活。
无线调参:
小智 AI 控制,化身 AI 机器人;

主要硬件列表:
已经上传到嘉立创开源平台:硬件开源链接^[4]^^^
D-BOT 的结构采用 3D 打印技术,包含以下 5 个打印件,设计简洁且易于组装:
3D模型文件已上传至 Maker World,创客们可以直接下载打印:D-BOT 3D 模型 ^[5]^ 。
git clone https://github.com/SmallPond/D-BOT
连接 D-BOT 的 WiFi 热点(DBOT_xxx),访问 <span>192.168.4.1</span> 配置 WiFi。
启动后会自动进行陀螺仪(MPU6050)自动校准和电机自动校准(左右电机依次顺逆时针转动);如果你在完全固定组装前启动过,电机将可能不会再校准导致电机工作不正常;
因为 mpu6050 不是直接板载在主控板的,焊接的差异可能导致平衡(机械)中值有差异,可以通过无线调参修改,有能力的同学也可以直接修改代码后重新编译;
D-BOT 的 AI 控制代码开源于 xiaozhi-esp32 ^[6]^ ,目前优先支持 45coll-sparkbot^[7]^ 开发板。
想适配其他版本的“小智”开发板?欢迎在仓库的 Issue 区 ^[8]^ 提交申请,详细描述板子型号,开发者会统一支持并发布固件。当然,动手能力强的同学也可以参考代码自行适配!
D-BOT 支持蓝牙手柄遥控,目前适配特定型号手柄,库开源在ESP32 解析蓝牙手柄信号 ^[9]^ 。X-Box 理论上可以使用其他库解析。
| 对象 | 命令 | 示例 |
|---|---|---|
| 直立环 | S | SP0.2——直立环 P 项设置为 0.2, SP不带参数则为获取当前 P 项 |
| 速度环 | V | VP0.2——速度环 P 项设置为 0.2 |
| 转向环 | T | TP0.2——转向环 P 项设置为 0.2 |
| D-BOT 前后移动闭环控制 | R | RP0.2 |
| D-BOT 转向闭环控制 | B | BP0.2 |
| 机械中值 | X | X-3——机械中值设置为 -3(默认值为 -2,正常直立时 D-BOT 向前走,应该减小该值) |
| 保存所有参数 | C | C |
更多回帖

