欢迎来到DIY SMARS Robot 机器人制作教程!在本教程中,将教你制作这款功能强大的机器人,它配备了OLED显示屏、RGB LED灯和可播放旋律的蜂鸣器等新功能。一起来设计电路、组装PCB以及3D打印机械部件。通过运动控制、蓝牙连接和可定制的眼部表情,让这款机器人活灵活现。
Atmega328p微控制器(SMD VQFN版本)、L293电机驱动器(SMD)、CH340 IC(USB转TTL转换器)、WS2812 RGB LED灯(12个)、有源蜂鸣器、SIL插针(用于超声波传感器和OLED显示屏)、9V电池、LM317稳压器、电阻器和电容器、二极管和晶体管、晶体振荡器(16MHz)。
定制PCB、焊锡膏、PCB模板、助焊剂清洗剂、加热板(或回流焊炉)。
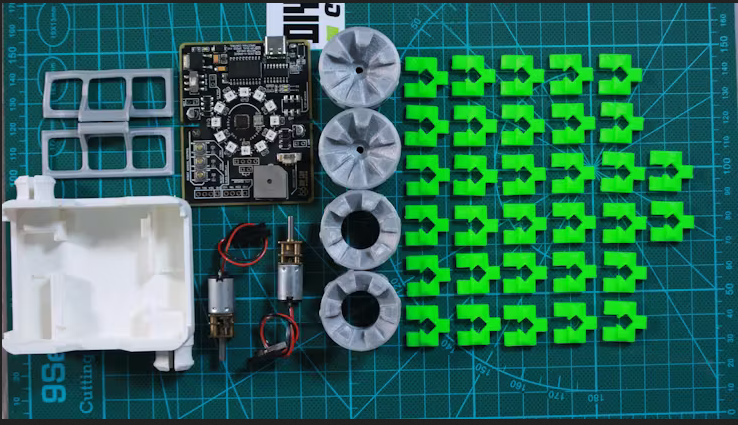
3D打印部件、1.6mm黄铜线(或1.75mm 3D打印机耗材用于链条关节)、小型直流电机(2个)、螺丝和螺母(用于组装)、强力胶。
OLED显示屏、超声波传感器(HC-SR04或类似型号)、HC-05蓝牙模块。
3D打印机、Altium Designer(用于电路设计)、Arduino IDE、MIT App Inventor、烙铁和焊锡、USB-C电缆(用于编程)。
嵌入式螺套(2mm,用于OLED显示屏外壳)。
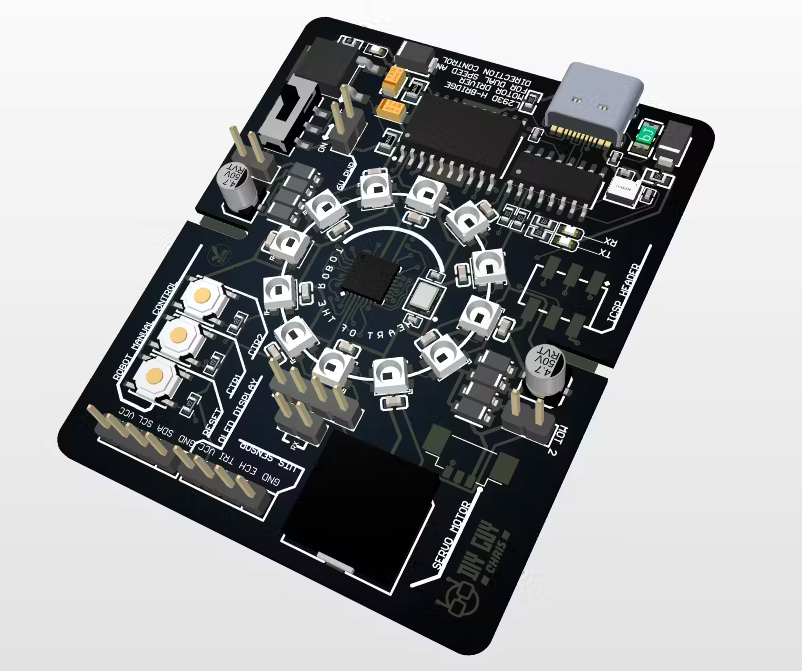
首先,在Altium Designer中设计电路原理图。设计的核心是采用SMD VQFN封装的Atmega328p微控制器,其小巧的尺寸是选择它的主要原因。将以下组件集成到原理图中:
完成原理图后,开始设计PCB布局。确保PCB的尺寸与Arduino UNO板相匹配,以便与机器人底盘兼容。以下是关键组件的布局:
接下来的步骤将涉及如何将组件焊接到PCB上,包括使用焊锡膏、加热板/回流焊炉以及最终的焊接检查等,这里仅简要概述。
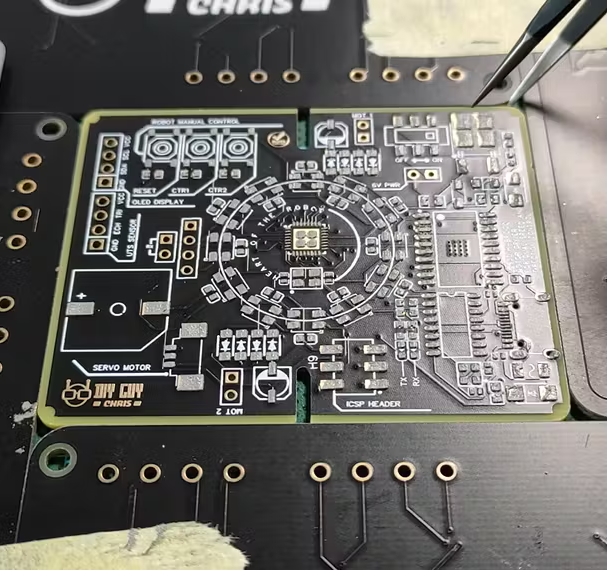
使用PCB模板将焊锡膏准确地涂覆到PCB上的焊盘上。然后,小心地将所有组件(包括微控制器、电机驱动器、LED灯、蜂鸣器、连接器等)按照原理图布局放置到PCB上。将PCB放入加热板或回流焊炉中,按照制造商推荐的参数进行加热,使焊锡膏熔化并固定组件。加热完成后,仔细检查每个焊点,确保焊接牢固且无短路。使用显微镜可以辅助检查微小的焊点细节。
准备好PCB和模板后,下一步是涂覆焊锡膏。首先,使用一些旧的PCB板或夹具将PCB稳固地放置好,以保持其稳定。然后,将模板精确地对齐到PCB的顶部组件焊盘上。将焊锡膏滴到模板上,并使用刮刀或类似工具轻轻地将它刮过焊盘。确保焊锡膏均匀地涂覆在所有焊盘上,以保证清洁且高效的焊接过程。
在涂覆焊锡膏时,要注意不要过量使用,以免在焊接过程中造成短路或焊点不清晰。同时,要确保模板与PCB之间的对齐准确无误,以避免焊锡膏涂覆到错误的焊盘上。完成焊锡膏涂覆后,可以轻轻移除模板,并检查焊盘上焊锡膏的分布情况,确保均匀一致。
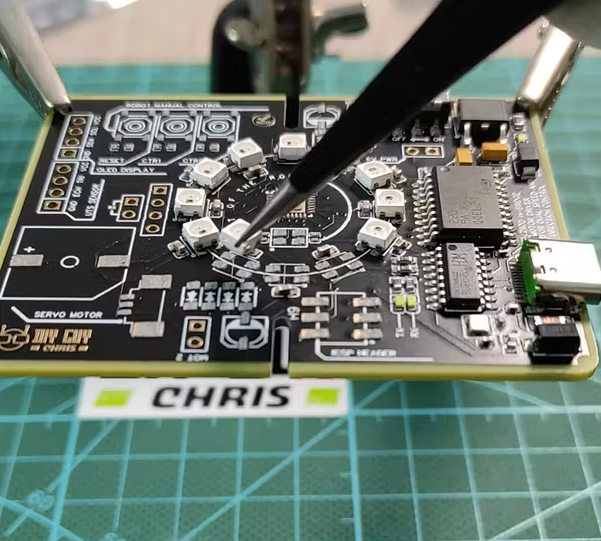
涂覆完焊锡膏后,接下来开始将SMD组件放置到PCB上。使用镊子小心地将每个组件放置到其对应的焊盘上,并按照你的设计布局进行定位。在放置组件时,要注意LED和IC等组件的方向,以避免放置错误。

确保每个组件都正确对齐并放置在焊盘上,特别是像IC这样的组件,它们的引脚必须精确地对齐焊盘,以确保良好的电气连接。对于小型组件,如0402或0603尺寸的电阻和电容,可能需要使用放大镜或显微镜来辅助放置。
在放置过程中,要小心不要碰到已经涂覆焊锡膏的焊盘,以免污染焊锡膏或移动组件的位置。如果组件放置不正确,可以使用镊子轻轻调整其位置,但要避免在焊盘上留下划痕或损坏焊锡膏的涂覆。
一旦所有组件都放置完毕,再次检查每个组件的位置和方向,确保它们符合设计要求,并为下一步的焊接过程做好准备。

当所有组件都放置好后,接下来使用加热板或回流焊炉将它们焊接到PCB上。如果使用加热板,请轻轻地将PCB放置在预热好的表面上,并监控焊接过程。焊锡膏会熔化并形成牢固的焊点。如果使用回流焊炉,请遵循焊锡膏推荐的回流曲线进行操作。
在焊接过程中,要确保PCB受热均匀,避免局部过热或未加热到位。加热板或回流焊炉的温度和时间设置应根据焊锡膏的类型和PCB的材质来确定。
当焊锡膏完全熔化并形成焊点后,可以小心地移除PCB,并让其自然冷却。在冷却过程中,焊点会凝固并变得牢固。
完成焊接后,应仔细检查每个焊点,确保它们清晰、光滑且没有短路。如果有任何不良焊点,可以使用烙铁进行修复。同时,也要检查组件是否有松动或损坏的情况,并及时进行处理。
最后,使用清洗剂或酒精清洗掉PCB上的多余焊锡膏和助焊剂残留物,以确保电路板的清洁和可靠性。
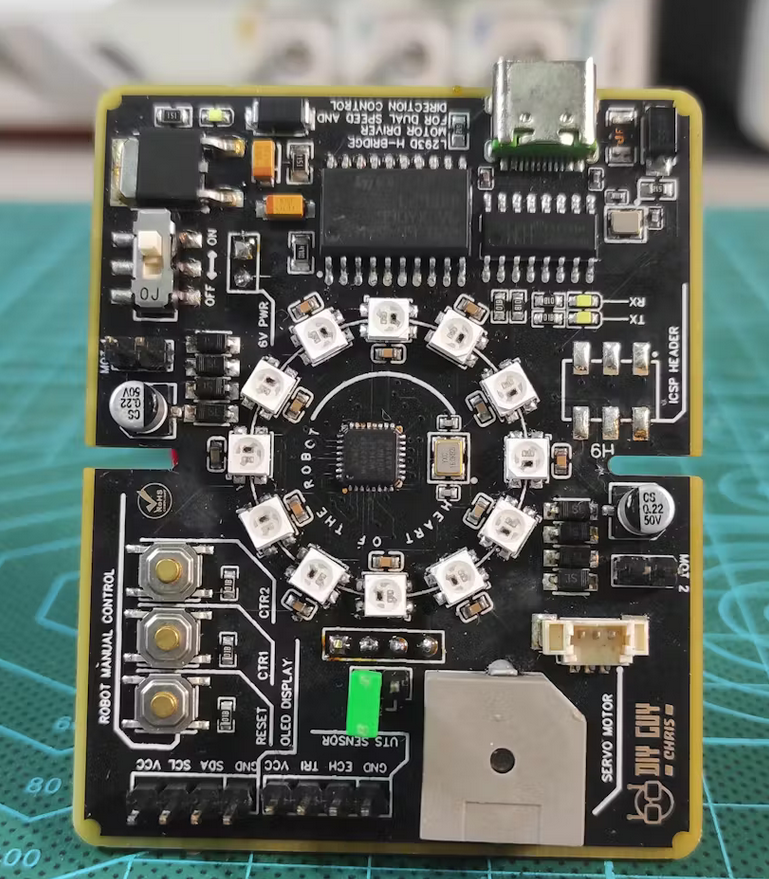
在显微镜下检查焊点,确保它们形成良好,没有焊桥或冷焊点。使用助焊剂清洗剂溶剂清洗电路板,以去除任何残留的助焊剂,从而获得干净且专业的外观。
接下来,焊接OLED显示屏、超声波传感器和电机输出的通孔连接器。将HC-05蓝牙模块和9V电池连接器也焊接到PCB上。确保所有连接都牢固可靠,并测试每个组件的功能是否正常。
在电路板焊接和测试完成后,可以开始组装机械部件和OLED显示屏。这通常包括将OLED显示屏安装到PCB上的相应位置,并固定好。同时,确保所有其他机械部件(如外壳、支架等)也都正确安装,并且与电路板上的连接器和组件相匹配。
在组装过程中,要注意不要损坏电路板上的任何组件或焊点。使用适当的工具和材料,如螺丝刀、螺母、垫片等,将机械部件牢固地固定在PCB上。同时,也要确保OLED显示屏的显示正常,没有损坏或不良显示。
完成机械部件和OLED显示屏的组装后,再次检查整个电路板的功能和连接情况,确保所有组件都正常工作,并且没有松动或损坏的情况。这样,你的电路板就可以与机器人底盘等其他部分进行连接和集成了。
首先,使用Thingiverse上提供的STL文件3D打印机器人的机械部件。打印完成后,开始组装机器人的链条。你可以使用1.6毫米的黄铜丝或1.75毫米的3D打印机耗材作为关节。将线或耗材穿过链环以创建灵活的链条。如果需要,可以使用超强胶固定关节。每条链条需要16个部件,因此两条链条总共需要32个部件。
在组装链条时,要确保每个关节都牢固地连接在一起,并且链条能够灵活地弯曲和伸展。如果关节松动或链条不够灵活,可以调整关节的紧固程度或使用额外的材料来加强连接。
一旦链条组装完成,你可以将它们安装到机器人的相应位置。这通常涉及到将链条的一端连接到机器人的驱动机构(如电机),并将另一端连接到机器人的负载(如轮子或其他执行器)。在连接链条时,要确保它们能够正确地传递力和运动,并且不会与机器人的其他部分发生干涉。
完成链条的安装后,你可以继续组装机器人的其他机械部件,如外壳、支架、传感器支架等。在组装过程中,要注意保持部件的准确性和稳定性,以确保机器人的整体性能和可靠性。
最后,对整个机器人进行功能测试和调试,确保所有机械部件都正常工作,并且机器人能够按照预期进行移动和执行任务。
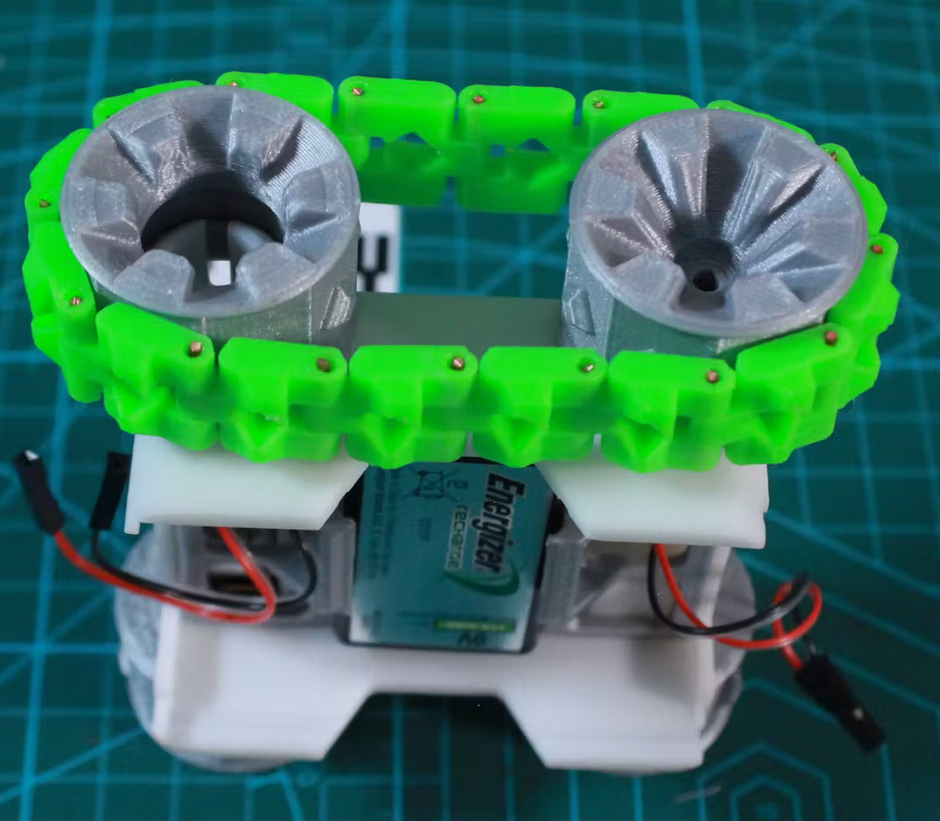
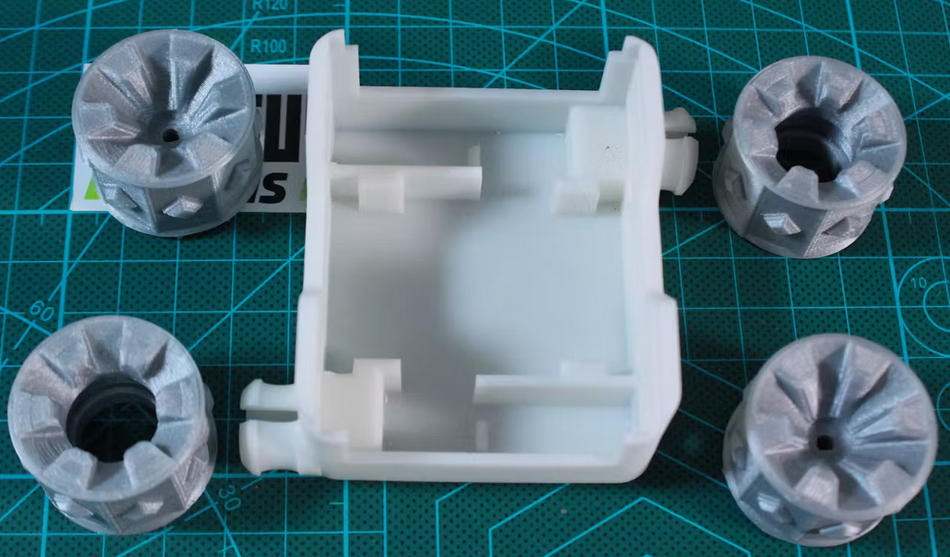
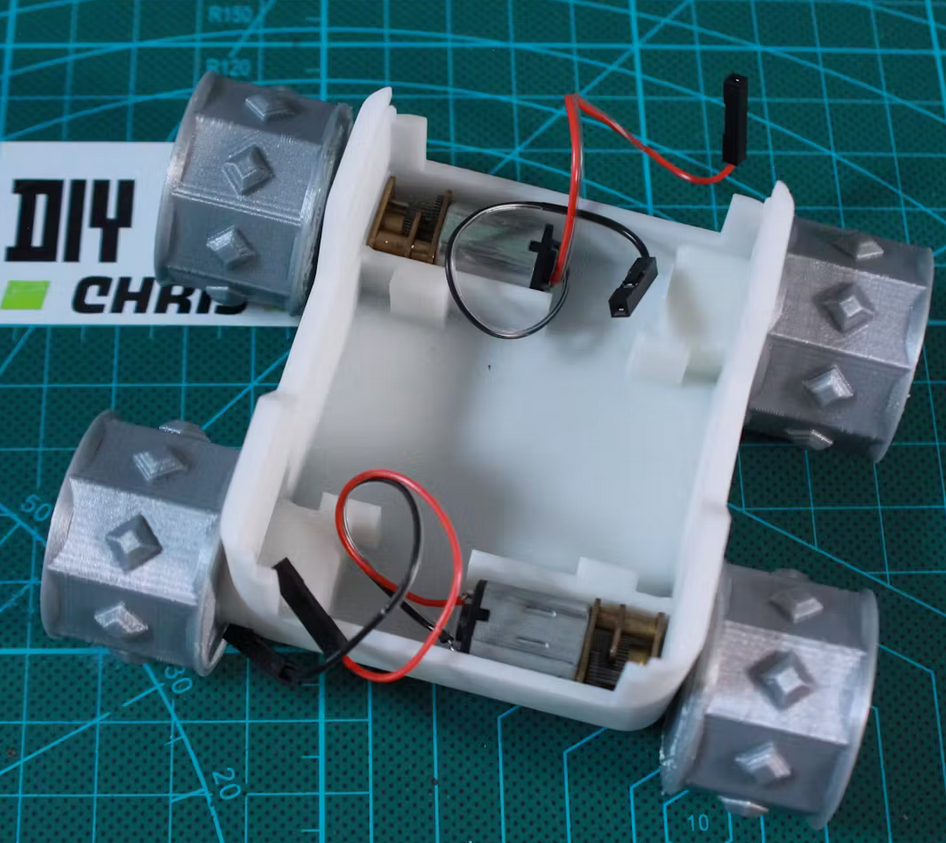
接下来,将轮子安装到直流电机上。先从从动轮开始,施加一些力使它们就位。然后,将主动轮连接到小型直流电机上。将直流电机和9V电池固定在各自的固定板部件上。最后,将链条连接到每个从动轮和对应的主动轮上,完成机器人的机械组装。
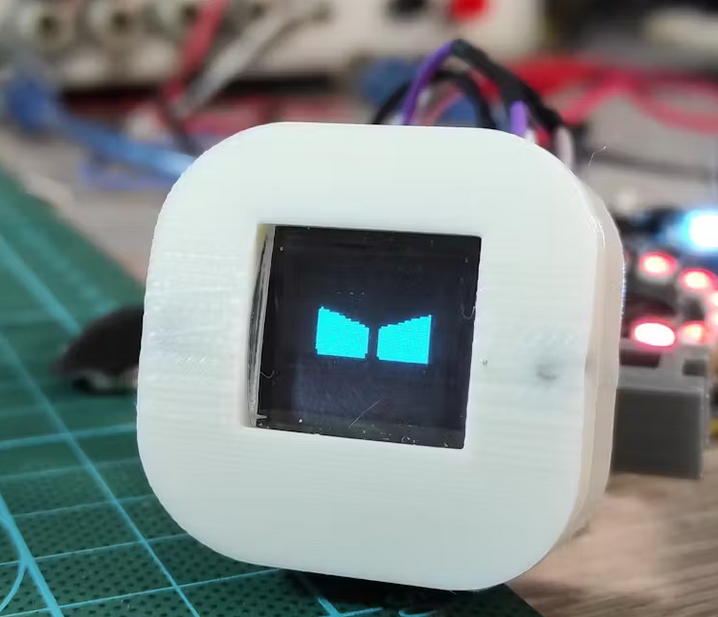
对于OLED显示屏,设计并3D打印一个外壳。在外壳中插入2毫米的螺纹嵌件,以提供安全的安装点。将OLED显示屏放入外壳中,并用螺丝固定。为了提高显示清晰度,可以考虑在外壳上添加一个树脂盖。将外壳盖用螺丝固定到位,完成组装。
现在,你已经准备好了机械部件和OLED显示屏外壳,可以与PCB进行集成。

为了控制你的SMARS机器人,你需要一个定制的Android应用。使用MIT App Inventor开发一个应用,包括:
设置应用以通过蓝牙为每个按钮按下传输串行字符。以下是步骤的简要概述:
开发一个Arduino代码来解释从应用发送的串行字符。此代码应:
使用Arduino IDE将代码上传到Atmega328p微控制器。在上传之前,断开蓝牙RX线的连接。上传后,放回跳线以重新建立蓝牙连接。
现在,你已经准备好使用组装的SMARS机器人测试Android应用了。

将电路板连接到9V电池,并将其插入机器人底盘。将电机和OLED显示屏连接到各自的连接器。上传Arduino代码,确保在编程期间断开蓝牙RX线的连接。使用在MIT App Inventor中开发的自定义Android应用测试机器人,验证所有功能,包括运动控制、LED颜色变化和眼睛表情。
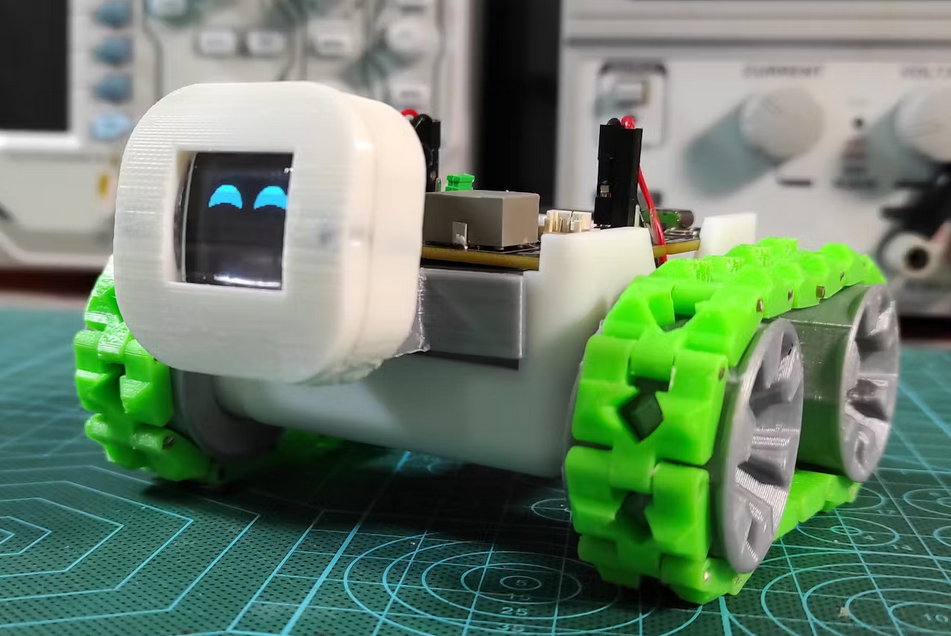
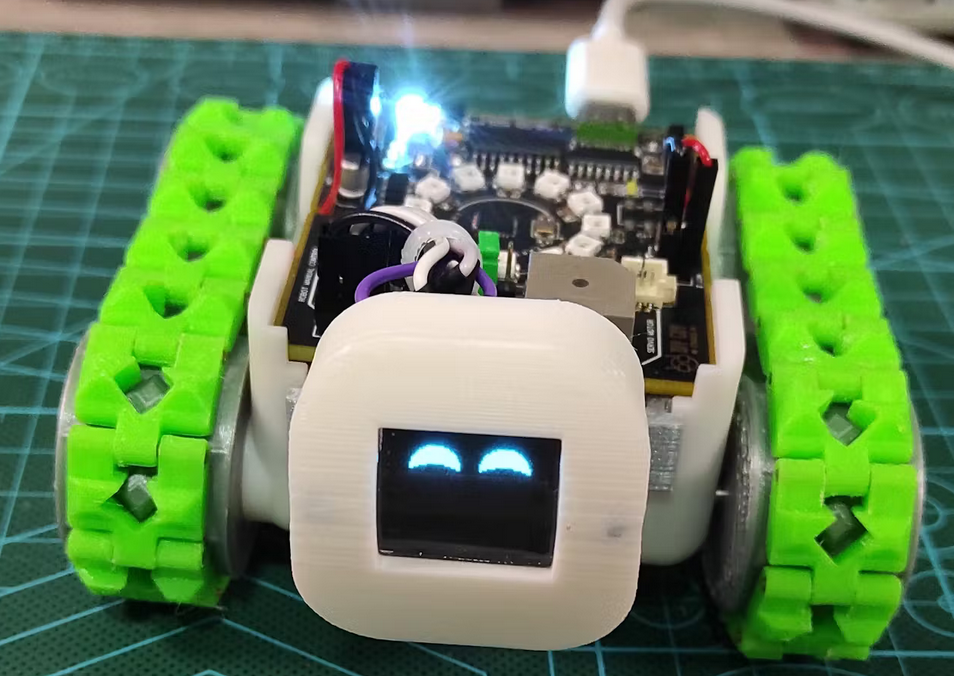
恭喜你!你已经成功构建了DIY SMARS机器人,探索它的新功能,继续创造,享受制作的乐趣!
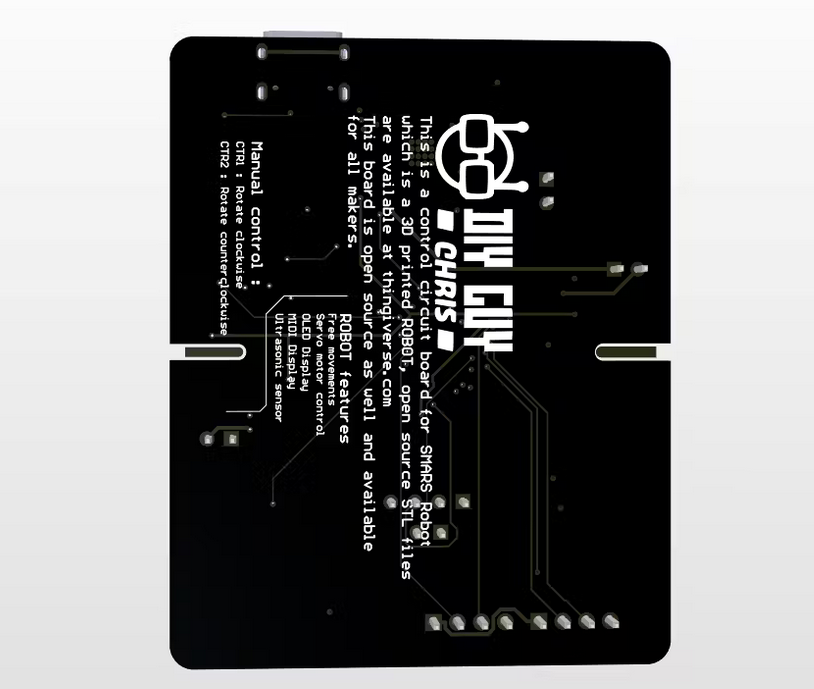
项目作者:DIY GUY Chris
项目来源:https://www.hackster.io/diyguyChris/diy-smars-robot-version-2-0-enhanced-with-new-features-02c5d8
更多回帖

