开发环境搭建与测试
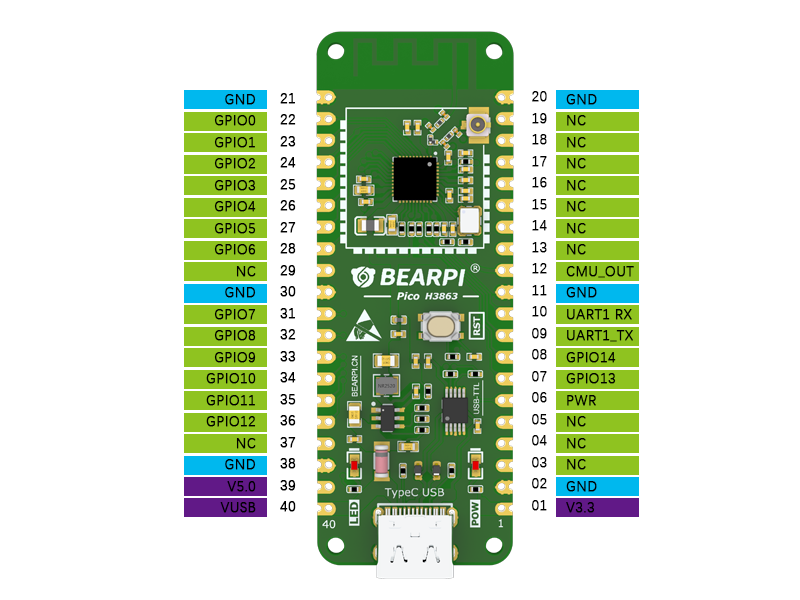
BearPi-Pico H3863 是一款基于高度集成 2.4GHz Wi-Fi6 、BLE、SLE 为主控芯片的核心板,具有灵活的数字接口,集成高性能 32bit 微处理器(MCU),硬件安全引擎以及丰富的外设接口,外设接口包括 SPI、UART、I2C、PWM、GPIO,支持 6 路 13bit 分辨率 ADC,内置 SRAM 和合封 Flash,并支持在 Flash 上运行程序。
CPU:WS63(又称:Hi3863) RISC-V 高性能 32bit CPU,最大主频支持 240MHz
存储:SRAM 606KB、ROM 300KB,4MB Flash
主板供电:通过USB 5V供电或者外部 5V供电
LED灯:上电指示 LED,红色;用户定义LED,蓝色;
通信:Wi-Fi、SLE、BLE
Typec USB接口,5V供电内部有5V转3.3V的DCDCMCU供电电压为3.3V,系统IO电压也为3.3V
支持丰富的对外接口
工作温度:-40℃ ~+85℃
支持Wi-Fi 20MHz频宽,提供最大114.7Mbps物理层速率,支持更大的发射功率和更远的覆盖距离,集成IEEE 802.11 b/g/n/ax基带。
支持BLE 1MHz/2MHz频宽、BLE4.0/4.1/4.2/5.0/5.1/5.2协议、BLE Mesh和BLE网关功能,最大空口速率2Mbps。
支持加密:AES、SM2、SM3、SM4 和 TRNG
详见:BearPi-Pico H3863 | 小熊派BearPi .

Windows 10 操作系统
git clone https://gitee.com/bearpi/bearpi-pico_h3863.git
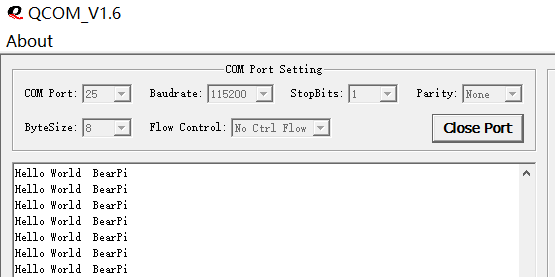
新建工程 ;WS63 ,开发板选择 ws63 ,工程名自定义,软件包路径选择 SDK 代码 bearpi-pico_h3863 文件夹;系统配置 选项,选择 Application 目录,勾选 Enable Sample、Enable the Sample of peripheral 以及需要要编译的 Sample 名称,并保存;重编译 按钮,编译代码工程配置 ,找到 程序加载 选项,端口 选择开发板映射出来的端口程序加载,按一下复位按键,即开始烧录默认程序烧录效果如下
通过串口打印 Hello World BearPi ,
1.新建工程
application/samples 目录下新建项目代码目录
2.增加自定义代码文件 **demo.c 和 demo.h ,并创建 CMakeLists.txt 文件
**3.在 CMakeLists.txt 中添加如下代码
set(SOURCES_LIST
${CMAKE_CURRENT_SOURCE_DIR}/demo.c
)
set(PUBLIC_HEADER_LIST
${CMAKE_CURRENT_SOURCE_DIR}
)
set(SOURCES "${SOURCES_LIST}" PARENT_SCOPE)
set(PUBLIC_HEADER "${PUBLIC_HEADER_LIST}" PARENT_SCOPE)
4.在 demo.c 和 demo.h 中添加目标代码,app_run 函数为程序入口函数
#include "common_def.h"
#include "osal_debug.h"
#include "cmsis_os2.h"
#include "app_init.h"
#define TASKS_TEST_TASK_STACK_SIZE 0x1000
#define TASKS_TEST_TASK_PRIO (osPriority_t)(17)
#define TASKS_TEST_DURATION_MS 1000
static void *tasks_test_task(const char *arg)
{
unused(arg);
while (1) {
osal_printk("Hello World BearPi\r\n");
osDelay(TASKS_TEST_DURATION_MS);
}
return NULL;
}
static void tasks_test_entry(void)
{
osThreadAttr_t attr;
attr.name = "TasksTask";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = TASKS_TEST_TASK_STACK_SIZE;
attr.priority = TASKS_TEST_TASK_PRIO;
if (osThreadNew((osThreadFunc_t)tasks_test_task, NULL, &attr) == NULL) {
/* Create task fail. */
}
}
/* Run the tasks_test_entry. */
app_run(tasks_test_entry);
5.将 demo 组件的内的 CMakeLists 添加到其上一层 CMakeLists 下,使构建系统能够执行到 demo 组件的 CMake
add_subdirectory_if_exist(demo)
6.在 samples/Kconfig 文件中添加以下代码
config ENABLE_MY_SAMPLE
bool
prompt "Enable the Sample of demo."
default n
depends on SAMPLE_ENABLE
help
This option means enable the sample of products.
7.点击 系统配置,打开配置界面,选中 Enable the Sample of demo 并保存、编译和加载 demo 工程
更多回帖

