上一章节提到了如何配置开发环境和尝试编写一个点灯程序,可以通过以下传送门查看上一章节内容:
【RA-Eco-RA0E1-32PIN-V1.0开发板试用】配置开发环境和编写一个点灯程序
在开始之前,先配置一下串口用于调试输出内容,查看开发板原理图可得知板载的USB转TTL串口连接的是芯片的UART2,也就是P1.09和P1.10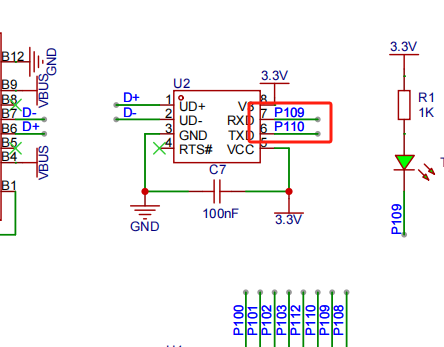
回到IDE中,打开透视图,这里推荐把板载的时钟启用了并切换到外置时钟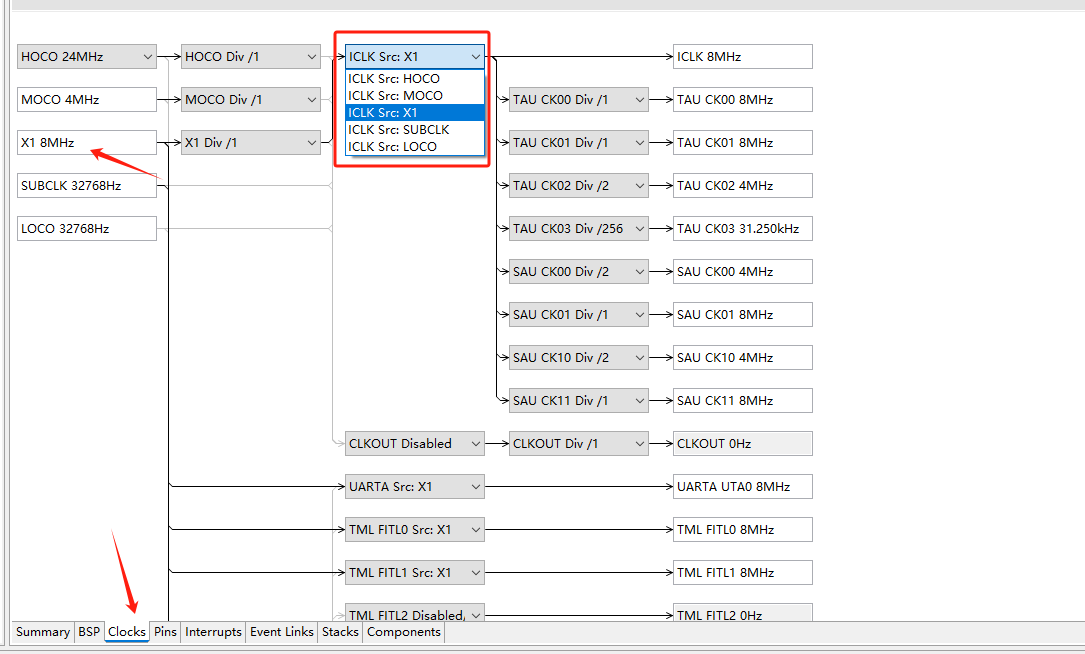
在X1那里填写时钟频率,查看板载的开发板可以得知搭载的是8Mhz的晶振。
接下来配置UART引脚,切换到Pin选项卡,配置UART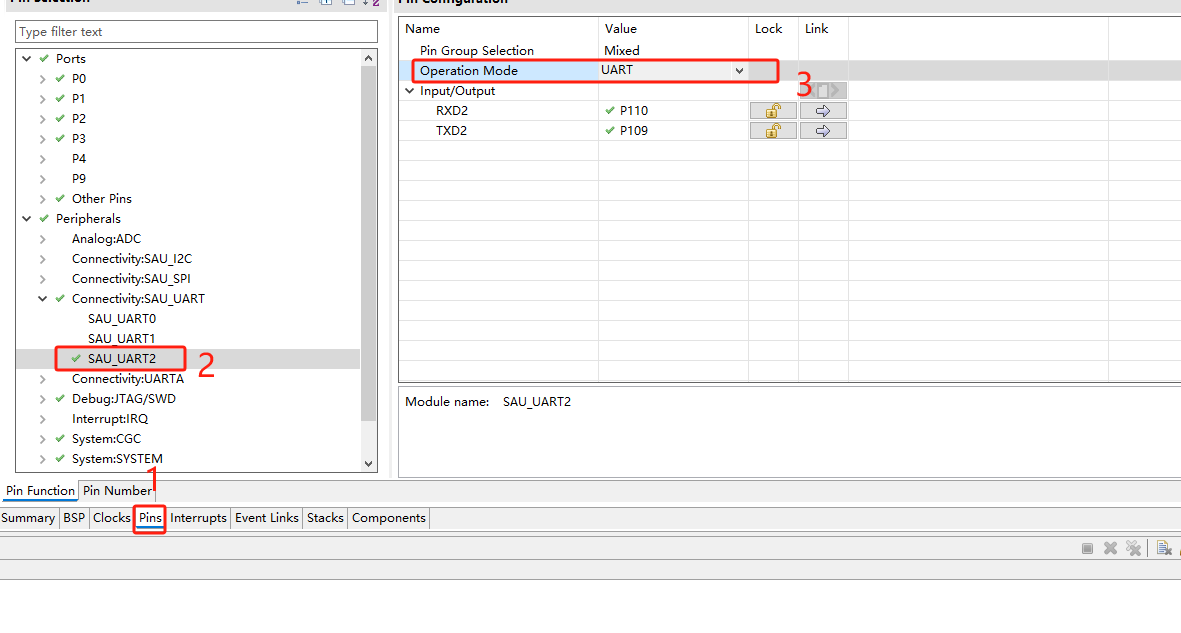
随后切换到stacks选项卡,点击右上角的New Stack添加UART进来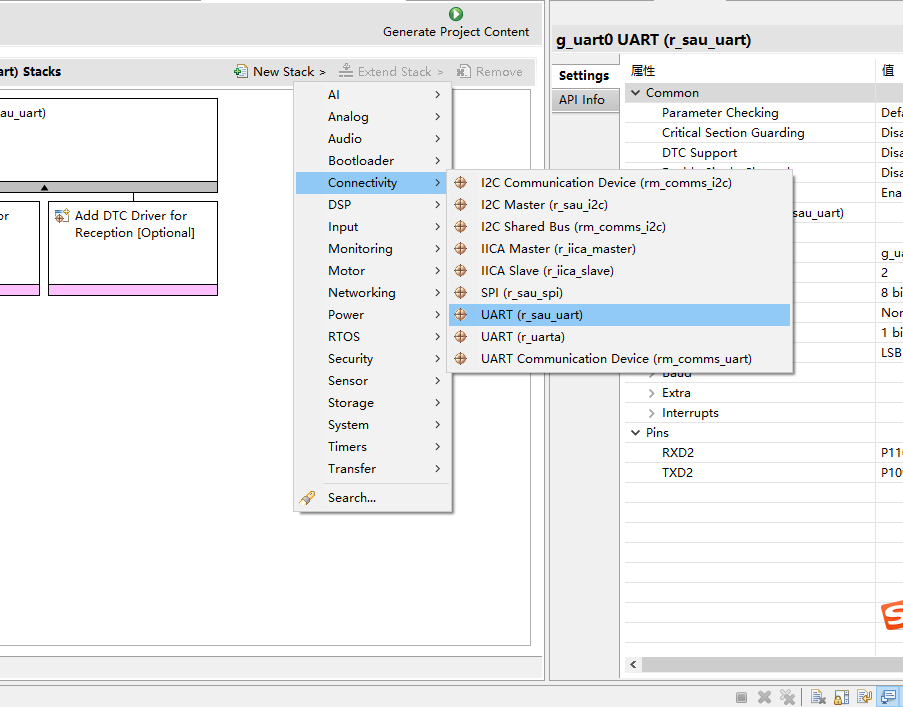
然后设置一下uart的属性,由于用到的是UART2,这里的通道改成2,默认是0。其余选项不动,默认的波特率为115200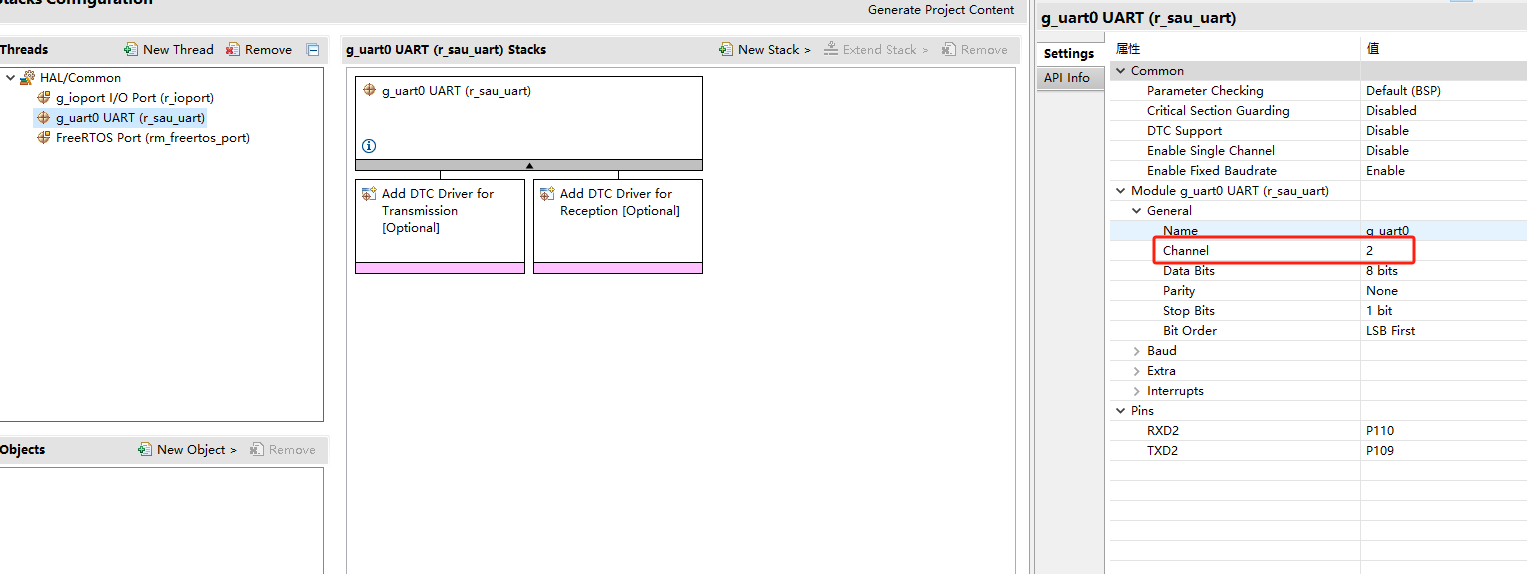
然后再配置一下HX711的引脚,HX711需要用到两个引脚,DOUT和SCK,其中DOUT需要配置为输入模式,SCK配置为输出模式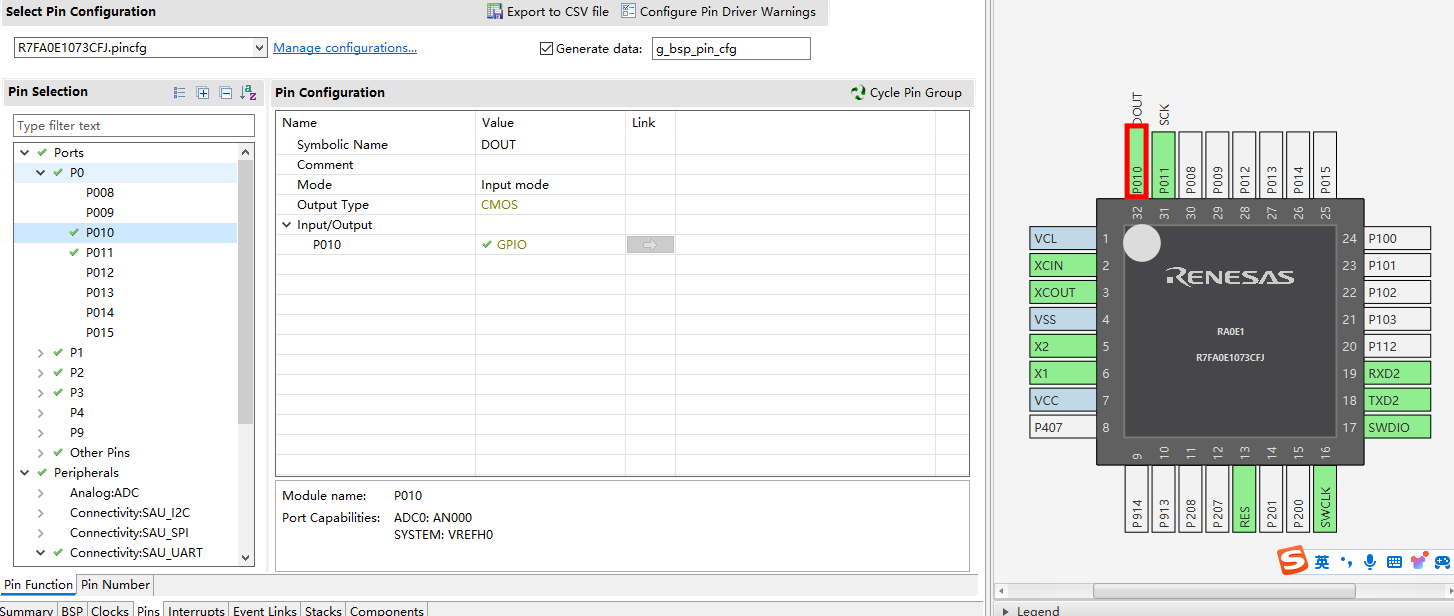
一切准备就绪后,点击右上角的
生成项目文件
首先添加UART部分驱动代码,目前的项目SRC文件夹下的结构为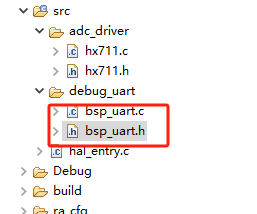
bsp_uart.h代码
/*
* bsp_uart.h
*
* Created on: 2024年8月26日
* Author: ityun
*/
#ifndef DEBUG_UART_BSP_UART_H_
#define DEBUG_UART_BSP_UART_H_
#include "hal_data.h"
#include <stdio.h>
void Debug_UART2_Init(void);
void debug_printf(char *str, ...);
#endif /* DEBUG_UART_BSP_UART_H_ */
bsp_uart.c 代码
#include"debug_uart/bsp_uart.h"
#include"stdio.h"
#include"stdlib.h"
#include"stdarg.h"
voidDebug_UART2_Init(void)
{
fsp_err_t err = FSP_SUCCESS;
err = R_SAU_UART_Open (&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
}
voiddebug_printf(char *str, ...)
{
uint8_t s[600] =
{ 0 };
fsp_err_t err = FSP_SUCCESS;
va_list args;
int len;
if ((str == NULL) || (strlen (str) == 0))
{
return;
}
va_start(args, str);
len = vsnprintf ((char*) s, 600, str, args);
va_end(args);
err = R_SAU_UART_Write (&g_uart0_ctrl, s, (uint32_t) len);
if (err != FSP_SUCCESS)
{
__BKPT(0);
}
}
这里主要通过R_SAU_UART_Open来初始化串口,然后编写了一个用于打印输出的debug_printf方法,内部通过R_SAU_UART_Write来把数据发送到串口
接下来看HX711的驱动代码,主要核心部分为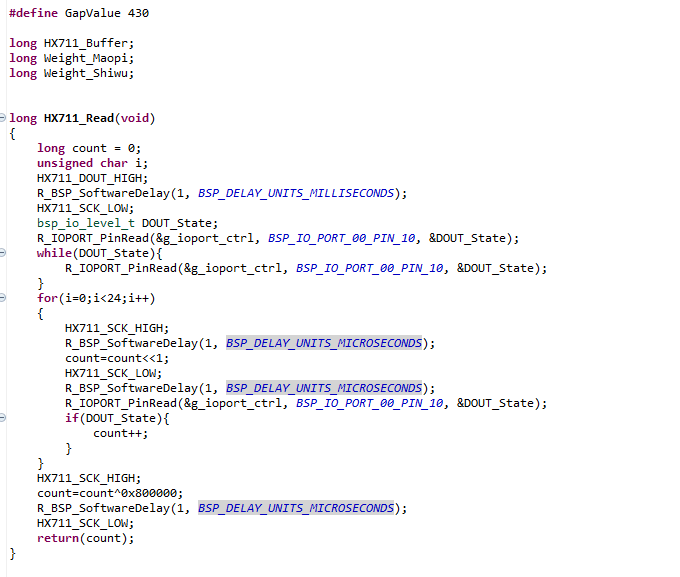
这里需要注意的是瑞萨读取IO的电平需要先赋值给变量然后才能判定IO口电平状态
一切准备就绪后,开始编写入口文件
#include <stdio.h>
#include "string.h"
#include "adc_driver/hx711.h"
#include <debug_uart/bsp_uart.h>
#include "hal_data.h"
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
extern long Weight_Shiwu;
/*******************************************************************************************************************//**
* main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function
* is called by main() when no RTOS is used.
**********************************************************************************************************************/
void hal_entry(void)
{
/* TODO: add your own code here */
Debug_UART2_Init ();
Get_Maopi (); // 电子秤去皮
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS);
Get_Maopi (); // 再次去皮
while (1)
{
Get_Weight ();
char buff_str[50];
sprintf(buff_str, "weigh: %ld g\r\n", Weight_Shiwu);
R_SAU_UART_Write (&g_uart0_ctrl, (uint8_t *)buff_str, (uint32_t) strlen(buff_str));
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
将固件编译之后烧录到芯片中验证结果,请看下方结果视频,目前验证可以正确的进行称重
更多回帖

