整个 GPIO 控制器由数字部分(GPIO 和外设接口)以及 IO 模拟部分(输出缓冲,双下拉,引脚Pad)组成。其中数字部分的输出可以通过 MUX 开关选择,模拟部分可以用来配置上下拉,驱动能力以及引脚输出电压等等。具体的规格如下:
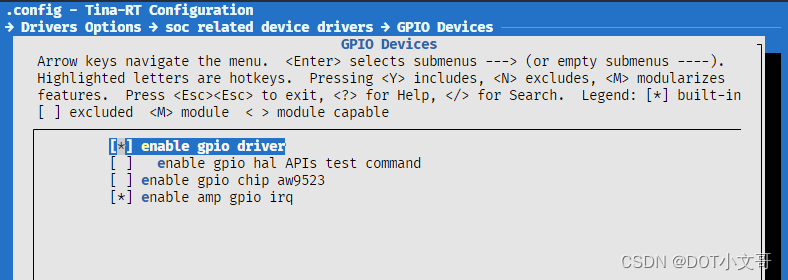
其 menuconfig 的配置如下:
Kernel Setup --->
Drivers Setup --->
SoC HAL Drivers --->
GPIO devices --->
[*] enable GPIO driver
[*] enbale GPIO hal APIs Test command
GPIO 模块源码结构如下所示:
rtos-hal/source/gpio/
│-- gpio.h # 模块内部公共头文件
│-- hal_gpio.c # 公共操作接口
├─ sun20iw2 # sun20iw2 平台的实现
│---- gpio-sun20iw2.c # GPIO具体实现
│---- platform-gpio.h # 实现头文件
include/hal/ # 驱动APIs声明头文件
└── hal_gpio.h
platform-gpio.h 主要包含 GPIO 控制器基地址、GPIO 中断号、pin 的声明等信息gpio-sun20iw2.c 主要包含每个平台的 GPIO 描述符配置由于 GPIO 需要配置每个引脚的引脚复用功能,中断类型,驱动能力,上下拉,输出/输入数据,输入/输出方向等等,所以对 GPIO 的这些配置都封装在一个 enum 枚举结构里面,方便使用。下面是一些配置的定义。想要了解更多的可以到 hal_gpio.h 查看
该枚举定义了可用的每个引脚定义,在配置引脚的时候将相关参数传入则可,具体定义如下:
typedef enum
{
GPIO_PC0 = GPIOC(0),
GPIO_PC1 = GPIOC(1),
GPIO_PC2 = GPIOC(2),
GPIO_PC3 = GPIOC(3),
...
GPIO_PL0 = GPIOL(0),
GPIO_PL1 = GPIOL(1),
GPIO_PL2 = GPIOL(2),
GPIO_PL3 = GPIOL(3),
GPIO_PL4 = GPIOL(4),
GPIO_PL5 = GPIOL(5),
} gpio_pin_t;
该枚举定义了引脚的驱动能力的值,具体定义如下:
typedef enum
{
GPIO_DRIVING_LEVEL0 = 0, /**< Defines GPIO driving current as level0. */
GPIO_DRIVING_LEVEL1 = 1, /**< Defines GPIO driving current as level1. */
GPIO_DRIVING_LEVEL2 = 2, /**< Defines GPIO driving current as level2. */
GPIO_DRIVING_LEVEL3 = 3 /**< Defines GPIO driving current as level3. */
} gpio_driving_level_t;
该枚举定义了引脚的上下拉的值,具体定义如下:
typedef enum
{
GPIO_PULL_DOWN_DISABLED = 0, /**< Defines GPIO pull up and pull down disable.*/
GPIO_PULL_UP = 1, /**< Defines GPIO is pull up state. */
GPIO_PULL_DOWN = 2, /**< Defines GPIO is pull down state. */
} gpio_pull_status_t;
该枚举定义引脚的输入输出数据,具体定义如下:
typedef enum
{
GPIO_DATA_LOW = 0, /**< GPIO data low. */
GPIO_DATA_HIGH = 1 /**< GPIO data high. */
} gpio_data_t;
该枚举定义了引脚的电压模式,可以配置成 1.8V 和 3.3V,具体定义如下
typedef enum
{
POWER_MODE_330 = 0,
POWER_MODE_180 = 1
} gpio_power_mode_t;
该枚举定义了引脚的中断模式,具体定义如下:
typedef enum
{
IRQ_TYPE_NONE = 0x00000000,
IRQ_TYPE_EDGE_RISING = 0x00000001,
IRQ_TYPE_EDGE_FALLING = 0x00000002,
IRQ_TYPE_EDGE_BOTH = (IRQ_TYPE_EDGE_FALLING | IRQ_TYPE_EDGE_RISING),
IRQ_TYPE_LEVEL_HIGH = 0x00000004,
IRQ_TYPE_LEVEL_LOW = 0x00000008,
} gpio_interrupt_mode_t;
函数原型:
int hal_gpio_init(void);
参数:
返回值
函数原型:
bool hal_gpio_check_valid(gpio_pin_t pin);
参数:
返回值
函数原型:
int hal_gpio_get_data(gpio_pin_t pin, gpio_data_t *data);
参数:
返回值
函数原型:
int hal_gpio_set_data(gpio_pin_t pin, gpio_data_t data);
参数:
返回值
函数原型:
int hal_gpio_set_direction(gpio_pin_t pin, gpio_direction_t direction);
参数:
返回值
函数原型:
int hal_gpio_get_direction(gpio_pin_t pin, gpio_direction_t *direction);
参数:
返回值
函数原型:
int hal_gpio_set_pull(gpio_pin_t pin, gpio_pull_status_t pull);
参数:
返回值
函数原型:
int hal_gpio_get_pull(gpio_pin_t pin, gpio_pull_status_t *pull);
参数:
返回值
函数原型:
int hal_gpio_set_driving_level(gpio_pin_t pin, gpio_driving_level_t level);
参数:
返回值
函数原型:
int hal_gpio_get_driving_level(gpio_pin_t pin, gpio_driving_level_t *level);
参数:
返回值
函数原型:
int hal_gpio_pinmux_set_function(gpio_pin_t pin, gpio_muxsel_t function_index);
参数:
返回值
函数原型:
int hal_gpio_pinmux_get_function(gpio_pin_t pin, gpio_muxsel_t *function_index);
参数:
返回值
函数原型:
int hal_gpio_sel_vol_mode(gpio_pin_t pins, gpio_power_mode_t pm_sel);
参数:
返回值
函数原型:
int hal_gpio_set_debounce(gpio_pin_t pin, unsigned value);
参数:
返回值
函数原型:
int hal_gpio_to_irq(gpio_pin_t pin, uint32_t *irq);
参数:
返回值
函数原型:
int hal_gpio_irq_request(uint32_t irq, hal_irq_handler_t hdle, unsigned long flags, void *data);
参数:
返回值
函数原型:
int hal_gpio_irq_free(uint32_t irq);
参数:
返回值
函数原型:
int hal_gpio_irq_enable(uint32_t irq);
参数:
返回值
函数原型:
int hal_gpio_irq_disable(uint32_t irq);
参数:
返回值
#include <stdint.h>
#include <hal_log.h>
#include <hal_cmd.h>
#include <hal_interrupt.h>
#include <hal_gpio.h>
#include <hal_gpio.h>
#define GPIO_TEST GPIO_PA1 // 待测试的 GPIO
#define GPIO_PORT_MAX (8)
static int pins_number[GPIO_PORT_MAX] = {
22, /* PA pins num */
12, /* PC pins num */
23, /* PD pins num */
18, /* PE pins num */
7, /* PF pins num */
8, /* PG pins num */
16, /* PH pins num */
5, /* PI pins num */
};
static void cmd_usage(void)
{
printf("Usage:\n"
"\t hal_gpio_cmd <cmd> <gpio> <arg>\n");
}
enum {
GPIO_CMD_SET_VOL = 0,
};
static hal_irqreturn_t gpio_irq_test(void *data)
{
hal_log_info("fake gpio interrupt handler");
return 0;
}
int cmd_test_gpio(int argc, char **argv)
{
uint32_t irq;
int ret = 0;
gpio_pull_status_t pull_state;
gpio_direction_t gpio_direction;
gpio_data_t gpio_data;
gpio_muxsel_t function_index;
hal_gpio_get_pull(GPIO_TEST, &pull_state);
hal_gpio_get_direction(GPIO_TEST, &gpio_direction);
hal_gpio_get_data(GPIO_TEST, &gpio_data);
hal_gpio_pinmux_get_function(GPIO_TEST,&function_index);
hal_log_info("Original: pin: %d pull state: %d, dir: %d, data: 0x%0x, function_index: %d",
GPIO_TEST, pull_state, gpio_direction, gpio_data, function_index);
hal_log_info("Setting: pin: %d pull state: %d, dir: %d, data: 0x%x, function_index: %d",
GPIO_TEST, GPIO_PULL_UP, GPIO_DIRECTION_OUTPUT, GPIO_DATA_HIGH, GPIO_MUXSEL_OUT);
hal_gpio_set_pull(GPIO_TEST, GPIO_PULL_UP);
hal_gpio_set_direction(GPIO_TEST, GPIO_DIRECTION_OUTPUT);
hal_gpio_set_data(GPIO_TEST, GPIO_DATA_HIGH);
hal_gpio_pinmux_set_function(GPIO_TEST,GPIO_MUXSEL_OUT);
hal_gpio_get_pull(GPIO_TEST, &pull_state);
hal_gpio_get_direction(GPIO_TEST, &gpio_direction);
hal_gpio_get_data(GPIO_TEST, &gpio_data);
hal_gpio_pinmux_get_function(GPIO_TEST,&function_index);
hal_log_info("Results: pin: %d pull state: %d, dir: %d, data: 0x%0x, function_index: %d",
GPIO_TEST, pull_state, gpio_direction, gpio_data, function_index);
if (pull_state == GPIO_PULL_UP
&& gpio_direction == GPIO_DIRECTION_OUTPUT
&& gpio_data == GPIO_DATA_HIGH
&& function_index == GPIO_MUXSEL_OUT)
{
hal_log_info("Test hal_gpio_set_pull API success!");
hal_log_info("Test hal_gpio_set_direction API success!");
hal_log_info("Test hal_gpio_set_data API success!");
hal_log_info("Test hal_gpio_pinmux_set_function API success!");
hal_log_info("Test hal_gpio_get_pull API success!");
hal_log_info("Test hal_gpio_get_direction API success!");
hal_log_info("Test hal_gpio_get_data API success!");
hal_log_info("Test hal_gpio_pinmux_get_function API success!");
} else {
hal_log_err("Test API fail");
goto failed;
}
ret = hal_gpio_to_irq(GPIO_TEST, &irq);
if (ret < 0)
{
hal_log_err("gpio to irq error, irq num:%d error num: %d", irq, ret);
goto failed;
} else {
hal_log_info("Test hal_gpio_to_irq API success!");
}
ret = hal_gpio_irq_request(irq, gpio_irq_test, IRQ_TYPE_EDGE_RISING, NULL);
if (ret < 0)
{
hal_log_err("request irq error, irq num:%d error num: %d", irq, ret);
goto failed;
} else {
hal_log_info("Test hal_gpio_irq_request API success!");
}
ret = hal_gpio_irq_enable(irq);
if (ret < 0)
{
hal_log_err("request irq error, error num: %d", ret);
goto failed;
} else {
hal_log_info("Test hal_gpio_irq_enable API success!");
}
ret = hal_gpio_irq_disable(irq);
if (ret < 0)
{
hal_log_err("disable irq error, irq num:%d, error num: %d", irq, ret);
goto failed;
} else {
hal_log_info("Test hal_gpio_irq_disable API success!");
}
ret = hal_gpio_irq_free(irq);
if (ret < 0)
{
hal_log_err("free irq error, error num: %d", ret);
goto failed;
} else {
hal_log_info("Test hal_gpio_irq_free API success!");
}
hal_log_info("Test gpio hal APIs success!");
return 0;
failed:
hal_log_err("Test gpio hal APIs failed!");
return -1;
}
int cmd_test_gpio_all(int argc, char **argv)
{
int i = 0;
int j =0;
int cnt = 0;
int ret = 0;
uint32_t irq;
gpio_pin_t pin;
gpio_pull_status_t pull_state;
gpio_direction_t gpio_direction;
gpio_data_t gpio_data;
hal_log_info("The program will test all gpio hal APIs ...\n");
for(i = 0; i < GPIO_PORT_MAX; i++)
{
for(j = 0; j < pins_number[i]; j++)
{
switch(i)
{
case 0: pin = GPIOA(j); break;
case 1: pin = GPIOC(j); break;
case 2: pin = GPIOD(j); break;
case 3: pin = GPIOE(j); break;
case 4: pin = GPIOF(j); break;
case 5: pin = GPIOG(j); break;
case 6: pin = GPIOH(j); break;
case 7: pin = GPIOI(j); break;
default: break;
}
hal_log_info("Setting: pull state: %d, dir: %d, data: 0x%x, pin: %d",
GPIO_PULL_DOWN, GPIO_DIRECTION_INPUT, GPIO_DATA_LOW, pin);
hal_gpio_set_pull(pin, GPIO_PULL_DOWN);
hal_gpio_set_direction(pin, GPIO_DIRECTION_INPUT);
hal_gpio_set_data(pin, GPIO_DATA_LOW);
hal_gpio_get_pull(pin, &pull_state);
hal_gpio_get_direction(pin, &gpio_direction);
hal_gpio_get_data(pin, &gpio_data);
hal_log_info("Results: pull state: %d, dir: %d, data: 0x%0x",
pull_state, gpio_direction, gpio_data);
if(pull_state != GPIO_PULL_DOWN
|| gpio_direction != GPIO_DIRECTION_INPUT
|| gpio_data != GPIO_DATA_LOW)
goto failed;
ret = hal_gpio_to_irq(pin, &irq);
if(ret < 0)
goto failed;
ret = hal_gpio_irq_request(irq, gpio_irq_test, IRQ_TYPE_EDGE_FALLING, NULL);
if(ret < 0)
goto failed;
ret = hal_gpio_irq_enable(irq);
if(ret < 0)
goto failed;
ret = hal_gpio_irq_disable(irq);
if(ret < 0)
goto failed;
ret = hal_gpio_irq_free(irq);
if(ret < 0)
goto failed;
cnt++;
hal_log_info("Test-%d: gpio pin %d hal success!\n", cnt, pin);
}
}
hal_log_info("Test all gpio hal APIs success, cnt: %d!", cnt);
return 0;
failed:
hal_log_err("Test all gpio hal APIs failed!");
return -1;
}
int cmd_test_gpio_cmd(int argc, char **argv)
{
int cmd, gpio, arg;
if (argc != 4)
cmd_usage();
cmd = strtol(argv[1], NULL, 0);
gpio = strtol(argv[2], NULL, 0);
arg = strtol(argv[3], NULL, 0);
switch (cmd) {
case GPIO_CMD_SET_VOL:
hal_gpio_sel_vol_mode(gpio, arg);
break;
default:
break;
}
return 0;
}
FINSH_FUNCTION_EXPORT_ALIAS(cmd_test_gpio, hal_gpio, gpio hal APIs tests);
FINSH_FUNCTION_EXPORT_ALIAS(cmd_test_gpio_cmd, hal_gpio_cmd, gpio hal APIs tests with cmd);
FINSH_FUNCTION_EXPORT_ALIAS(cmd_test_gpio_all, hal_gpio_all, gpio hal all APIs tests);
更多回帖

