线形拓扑是在一条主干总线分出各个节点支线,其优点在于布线施工简单,接线方便,阻抗匹配规则固定,缺点是拓扑不够灵活,在一定程度上影响通讯距离,如下图所示: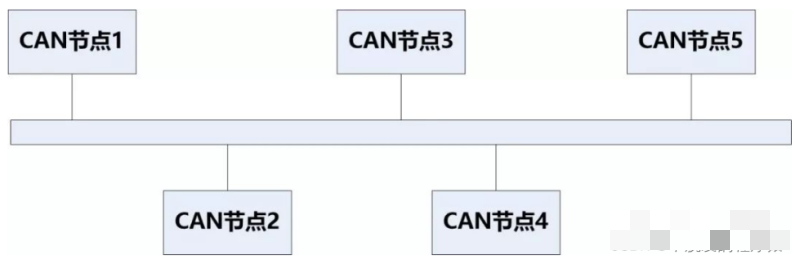
星形拓扑是每个节点通过中央设备连到一起,其优点是容易扩展,缺点是一旦中央设备出故障会导致总线集体故障,而且分支线长不同,阻抗匹配复杂,可能需要通过一些中继器或集线器进行扩展,如下图所示:
树形拓扑是节点分支比较多,且分支长度不同,其优点是布线方便,缺点是网络拓扑复杂,阻抗匹配困难,通讯中极易出现问题,必须加一些集线器设备,如下图所示:
环形拓扑是将CAN总线头尾相连,形成环状,其优点是线缆任意位置断开,总线都不会出现问题,缺点是信号反射严重,无法用于高波特率和远距离传输,如下图所示:
CAN_High - CAN_Low < 0.5V 时候为隐性的,逻辑信号表现为"逻辑1",即高电平。
CAN_High - CAN_Low > 0.9V 时候为显性的,逻辑信号表现为"逻辑0",即低电平。
隐性、显性之间存在天然的优先级特性:显性(逻辑0)的优先级比隐性(逻辑1)高;该优先级的特性,可以用来进行多主机的仲裁;
在总线上显性电平具有优先权,只要有一个节点输出显性电平,总线上即为显性电平。而隐形电平则具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平(显性电平比隐性电平更强)

CAN_Rx和CAN_Tx分别是从MCU中接出来的引脚,比如MCU要发送一个逻辑1,则只要将CAN_Tx设置为1,经过CAN收发器转换,CAN_High和CAN_Low 线上的电压均为 2.5v,即传到总线的电压差 Vh-Vl=0V,总线上的状态则就是逻辑1。同样,当CAN_High和CAN_Low 读取到 CAN总线电压分别3.5V和1.5V,即压差为2V,经过收发器转换,MCU则可通过CAN_Rx读取到信号0。
在CAN协议中,当总线上的上出现连续的11位隐性电平(两根线电压差小于0.5V),表示总线就处于空闲状态。
数据传输
每次发送数据前,节点都会监听总线的状态,如果总线状态为空闲时,它就会立即向总线上发送自己的数据,这个数据里不仅有数据,还有本身的ID信息或者其他的控制指令,应称为数据包(数据帧),也叫做报文。
它以一个显性位(逻辑 0)开始,以 7 个连续的隐性位(逻辑 1)结束。在它们之间,分为仲裁段、控制段、数据段、CRC 段和 ACK 段,以标准数据帧为例。


更多回帖

