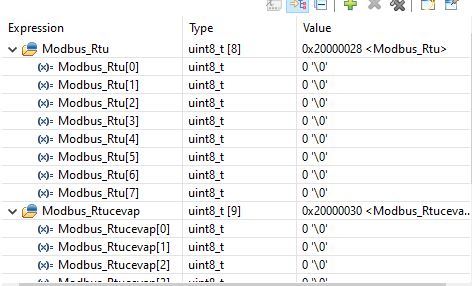
我无法在查询 rs485 时传输我的数据。因此也没有接收到数据。我在能量计和我的 uart 中也选择了波特率 9600。我选择了 USART1,PA9 tx,PA10 rx 和 GPIO PD11,使用的模块是 Max485 模块。因此,在检查表达式时,无法收到任何内容,到处都是 0。Modbus_Rtu[0]=1;
Modbus_Rtu[1]=3;
Modbus_Rtu[2]=0;
Modbus_Rtu[3]=0;
Modbus_Rtu[4]=1;
Modbus_Rtu[5]=5;
如果 Slave ID 错误,那么传输时至少应该有值.....这是我的代码和 scrrenshot
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- *
© Copyright (c) 2021 STMicroelectronics.- * All rights reserved.
- *
- * This software component is licensed by ST under Ultimate Liberty license
- * SLA0044, the "License"; You may not use this file except in compliance with
- * the License. You may obtain a copy of the License at:
- *
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- uint8_t Modbus_Rtu[8];
- uint8_t Modbus_Rtucevap[9];
- uint16_t CRC_Control;
- /* USER CODE END Includes */
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
- /* USER CODE END PTD */
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
- /* USER CODE END PM */
- /* Private variables ---------------------------------------------------------*/
- UART_HandleTypeDef huart1;
- DMA_HandleTypeDef hdma_usart1_rx;
- /* USER CODE BEGIN PV */
- /* USER CODE END PV */
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- static void MX_GPIO_Init(void);
- static void MX_DMA_Init(void);
- static void MX_USART1_UART_Init(void);
- /* USER CODE BEGIN PFP */
- uint16_t ModRtu_CRC(uint8_t buf[8], int len)
- {
- uint16_t crc = 0xFFFF;
- for (int pos = 0; pos < len; pos++) {
- crc ^= (uint16_t)buf[pos]; // XOR byte into least sig. byte of crc
- for (int i = 8; i != 0; i--) { // Loop over each bit
- if ((crc & 0x0001) != 0) { // If the LSB is set
- crc >>= 1; // Shift right and XOR 0xA001
- crc ^= 0xA001;
- }
- else // Else LSB is not set
- crc >>= 1; // Just shift right
- }
- }
- // Note, this number has low and high bytes swapped, so use it accordingly (or swap bytes)
- return crc;
- }
- /* USER CODE END PFP */
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- /* USER CODE END 0 */
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- /* USER CODE END 1 */
- /* MCU Configuration--------------------------------------------------------*/
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
- /* USER CODE BEGIN Init */
- /* USER CODE END Init */
- /* Configure the system clock */
- SystemClock_Config();
- /* USER CODE BEGIN SysInit */
- /* USER CODE END SysInit */
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_DMA_Init();
- MX_USART1_UART_Init();
- /* USER CODE BEGIN 2 */
- HAL_UART_Receive_DMA(&huart1, Modbus_Rtucevap, 9);
- Modbus_Rtu[0]=1;
- Modbus_Rtu[1]=3;
- Modbus_Rtu[2]=0;
- Modbus_Rtu[3]=0;
- Modbus_Rtu[4]=1;
- Modbus_Rtu[5]=5; //for voltage query
- /* USER CODE END 2 */
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_11, GPIO_PIN_SET);
- CRC_Control= ModRtu_CRC(Modbus_Rtu,6);
- Modbus_Rtu[6]= CRC_Control & 0xff;
- Modbus_Rtu[7]= (CRC_Control>>8) & 0xff;
- HAL_UART_Transmit(&huart1, Modbus_Rtu, 8, 100);
- HAL_Delay(1000);
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_11, GPIO_PIN_RESET);
- HAL_Delay(1000);
- }
- /* USER CODE END 3 */
- }
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
- /** Configure the main internal regulator output voltage
- */
- __HAL_RCC_PWR_CLK_ENABLE();
- __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
- RCC_OscInitStruct.HSEState = RCC_HSE_ON;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
- RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
- RCC_OscInitStruct.PLL.PLLM = 4;
- RCC_OscInitStruct.PLL.PLLN = 84;
- RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
- RCC_OscInitStruct.PLL.PLLQ = 7;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** Initializes the CPU, AHB and APB buses clocks
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
- |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
- RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
- RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
- RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
- RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
- {
- Error_Handler();
- }
- }
- /**
- * @brief USART1 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_USART1_UART_Init(void)
- {
- /* USER CODE BEGIN USART1_Init 0 */
- /* USER CODE END USART1_Init 0 */
- /* USER CODE BEGIN USART1_Init 1 */
- /* USER CODE END USART1_Init 1 */
- huart1.Instance = USART1;
- huart1.Init.BaudRate = 9200;
- huart1.Init.WordLength = UART_WORDLENGTH_8B;
- huart1.Init.StopBits = UART_STOPBITS_1;
- huart1.Init.Parity = UART_PARITY_NONE;
- huart1.Init.Mode = UART_MODE_TX_RX;
- huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
- huart1.Init.OverSampling = UART_OVERSAMPLING_16;
- if (HAL_UART_Init(&huart1) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN USART1_Init 2 */
- /* USER CODE END USART1_Init 2 */
- }
- /**
- * Enable DMA controller clock
- */
- static void MX_DMA_Init(void)
- {
- /* DMA controller clock enable */
- __HAL_RCC_DMA2_CLK_ENABLE();
- /* DMA interrupt init */
- /* DMA2_Stream2_IRQn interrupt configuration */
- HAL_NVIC_SetPriority(DMA2_Stream2_IRQn, 0, 0);
- HAL_NVIC_EnableIRQ(DMA2_Stream2_IRQn);
- }
- /**
- * @brief GPIO Initialization Function
- * @param None
- * @retval None
- */
- static void MX_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct = {0};
- /* GPIO Ports Clock Enable */
- __HAL_RCC_GPIOH_CLK_ENABLE();
- __HAL_RCC_GPIOD_CLK_ENABLE();
- __HAL_RCC_GPIOA_CLK_ENABLE();
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOD, GPIO_PIN_11, GPIO_PIN_RESET);
- /*Configure GPIO pin : PD11 */
- GPIO_InitStruct.Pin = GPIO_PIN_11;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
- }
- /* USER CODE BEGIN 4 */
- /* USER CODE END 4 */
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %d
", file, line) */ - /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/


 举报
举报



