您好,我正在尝试在我的 canbus 驱动程序中开发一些错误管理。
我注意到 canbus 结构中有一个 ErrorCode。
该错误代码可能具有以下任何值:
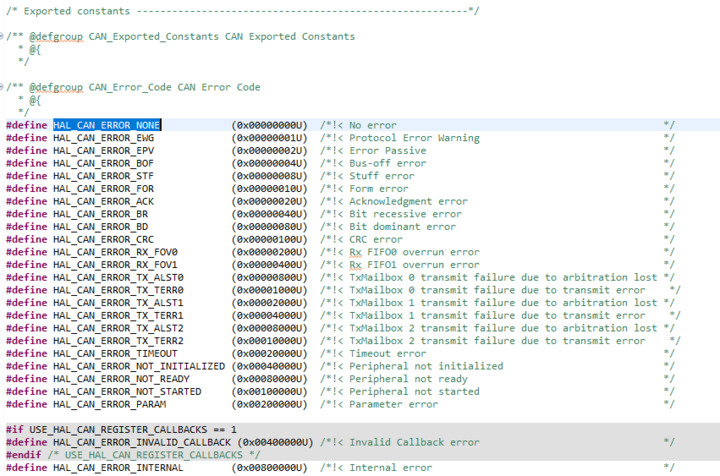 但事实证明 hcan.ErrorCode 总是 HAL_CAN_ERROR_NONE,即使 canbus没有插入任何应该给出以下任何一个的东西:
但事实证明 hcan.ErrorCode 总是 HAL_CAN_ERROR_NONE,即使 canbus没有插入任何应该给出以下任何一个的东西:
- //#define HAL_CAN_ERROR_EPV (0x00000002U) /*!< Error Passive */
- //#define HAL_CAN_ERROR_BOF (0x00000004U) /*!< Bus-off error */
- //#define HAL_CAN_ERROR_ACK (0x00000020U) /*!< Acknowledgment error */
我在这里错过了什么吗?也许需要在 HAL 的某个地方启用某些东西才能得到错误?


 举报
举报



