你好!我在
STM32f030k6t6 中使用定时器中断
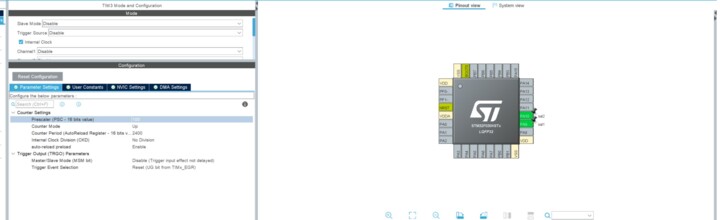
tim3,我想配置不同的定时器更新 5ms,我正在使用 ecuation:tout=(prescaler*preload)/(clock_frecuency)。预加载的其他计算是:预加载=(tout*clock_frecuency)/(prescaler)。现在,对于 5 毫秒(0,005 秒),预加载为:预加载=(0.005*48*1000000)/100,预加载=2400,预分频器=100,时钟频率= 48Mhz。
定时器配置值,代码是:
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- * Copyright (c) 2022 STMicroelectronics.
- * All rights reserved.
- *
- * This software is licensed under terms that can be found in the LICENSE file
- * in the root directory of this software component.
- * If no LICENSE file comes with this software, it is provided AS-IS.
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- /* USER CODE END Includes */
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
- /* USER CODE END PTD */
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
- /* USER CODE END PM */
- /* Private variables ---------------------------------------------------------*/
- /* USER CODE BEGIN PV */
- /* USER CODE END PV */
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- static void MX_GPIO_Init(void);
- static void MX_TIM16_Init(void);
- static void MX_TIM3_Init(void);
- /* USER CODE BEGIN PFP */
- /* USER CODE END PFP */
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- /* USER CODE END 0 */
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- /* USER CODE END 1 */
- /* MCU Configuration--------------------------------------------------------*/
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
- /* USER CODE BEGIN Init */
- /* USER CODE END Init */
- /* Configure the system clock */
- SystemClock_Config();
- /* USER CODE BEGIN SysInit */
- /* USER CODE END SysInit */
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_TIM16_Init();
- MX_TIM3_Init();
- /* USER CODE BEGIN 2 */
- /*---------------------------------------------------------*/
- /*---------------------------------------------------------*/
- /*------------ habilita interrupcion del timer -----------*/
- LL_TIM_EnableIT_UPDATE(TIM3);
- // LL_TIM_EnableIT_UPDATE(TIM14);
- // LL_TIM_EnableIT_UPDATE(TIM16);
- /*---------------------------------------------------------*/
- /*---------- inicializa el contador ------------------------*/
- LL_TIM_EnableCounter(TIM3);
- // LL_TIM_EnableCounter(TIM14);
- // LL_TIM_EnableCounter(TIM16);
- // LL_TIM_EnableCounter(TIM17);
- /* USER CODE END 2 */
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- }
- /* USER CODE END 3 */
- }
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
- RCC_OscInitStruct.HSIState = RCC_HSI_ON;
- RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
- RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
- RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL12;
- RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV1;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** Initializes the CPU, AHB and APB buses clocks
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
- |RCC_CLOCKTYPE_PCLK1;
- RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
- RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
- RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
- {
- Error_Handler();
- }
- }
- /**
- * @brief TIM3 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM3_Init(void)
- {
- /* USER CODE BEGIN TIM3_Init 0 */
- /* USER CODE END TIM3_Init 0 */
- LL_TIM_InitTypeDef TIM_InitStruct = {0};
- /* Peripheral clock enable */
- LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM3);
- /* TIM3 interrupt Init */
- NVIC_SetPriority(TIM3_IRQn, 0);
- NVIC_EnableIRQ(TIM3_IRQn);
- /* USER CODE BEGIN TIM3_Init 1 */
- /* USER CODE END TIM3_Init 1 */
- TIM_InitStruct.Prescaler = 1000;
- TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
- TIM_InitStruct.Autoreload = 2400;
- TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
- LL_TIM_Init(TIM3, &TIM_InitStruct);
- LL_TIM_EnableARRPreload(TIM3);
- LL_TIM_SetClockSource(TIM3, LL_TIM_CLOCKSOURCE_INTERNAL);
- LL_TIM_SetTriggerOutput(TIM3, LL_TIM_TRGO_RESET);
- LL_TIM_DisableMasterSlaveMode(TIM3);
- /* USER CODE BEGIN TIM3_Init 2 */
- /* USER CODE END TIM3_Init 2 */
- }
- /**
- * @brief TIM16 Initialization Function
- * @param None
- * @retval None
- */
- static void MX_TIM16_Init(void)
- {
- /* USER CODE BEGIN TIM16_Init 0 */
- /* USER CODE END TIM16_Init 0 */
- LL_TIM_InitTypeDef TIM_InitStruct = {0};
- /* Peripheral clock enable */
- LL_APB1_GRP2_EnableClock(LL_APB1_GRP2_PERIPH_TIM16);
- /* TIM16 interrupt Init */
- NVIC_SetPriority(TIM16_IRQn, 0);
- NVIC_EnableIRQ(TIM16_IRQn);
- /* USER CODE BEGIN TIM16_Init 1 */
- /* USER CODE END TIM16_Init 1 */
- TIM_InitStruct.Prescaler = 1000;
- TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
- TIM_InitStruct.Autoreload = 274;
- TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
- TIM_InitStruct.RepetitionCounter = 0;
- LL_TIM_Init(TIM16, &TIM_InitStruct);
- LL_TIM_EnableARRPreload(TIM16);
- /* USER CODE BEGIN TIM16_Init 2 */
- /* USER CODE END TIM16_Init 2 */
- }
- /**
- * @brief GPIO Initialization Function
- * @param None
- * @retval None
- */
- static void MX_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct = {0};
- /* GPIO Ports Clock Enable */
- __HAL_RCC_GPIOA_CLK_ENABLE();
- /*Configure GPIO pin Output Level */
- HAL_GPIO_WritePin(GPIOA, sal1_Pin|sal2_Pin, GPIO_PIN_RESET);
- /*Configure GPIO pins : sal1_Pin sal2_Pin */
- GPIO_InitStruct.Pin = sal1_Pin|sal2_Pin;
- GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStruct.Pull = GPIO_NOPULL;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
- }
- /* USER CODE BEGIN 4 */
- /* USER CODE END 4 */
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %d
", file, line) */ - /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
定时器中断是:
我用分析器逻辑查看时间,但不是真实值,时间是错误的。
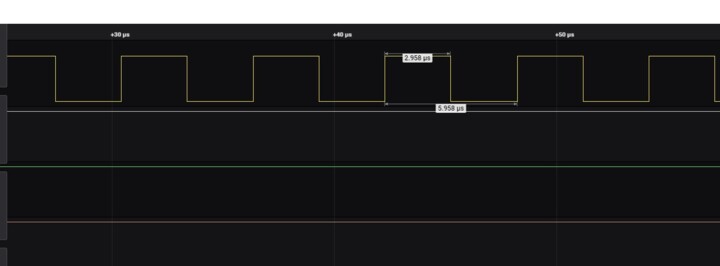
时间是 2.9 us,我想要 5ms 的更新定时器中断


 举报
举报



