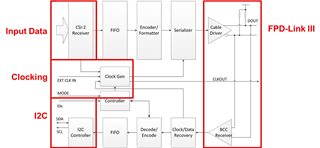
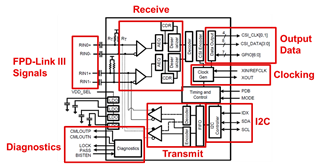
a. SoC视频接口提供的随路时钟; b. 本地提供的晶体或者晶振时钟;c. 从反向通道中恢复的解串器提供的参考时钟;d.芯片自身集成的时钟振荡电路。工程师选取芯片特定的参考时钟模式后,时钟模块会将相应的时钟分发到芯片的各个模块中,包括帧编码模块、串行器模块和锁相环,从而保证整个芯片乃至整个系统工作时钟源一致,避免FIFO的溢出和空载,也避免视频数据的行场、帧场同步信息紊乱。
高速视频信号从串行器传输到解串器的过程中经过PCB走线、连接器和线束,这些传输介质都会衰减信号幅度,增加信号噪声,而且频率越高,被影响的程度越大。 如Figure 9所示,串行器的输出数据的眼图为左边第一幅图所示,比较清晰、干净;经过传输线以后,眼图闭合,如中间第二幅图所示。为了补偿传输介质对信号的恶化,FPD Link 器件提供了Equalizer均衡器模块。这个模块放大补偿输入信号,且对信号高频部分补偿得更多,以此来部分抵消传输通道对信号的影响。通过Equalizer之后,输入信号的眼图重新张开,如右边第三幅图所示。