摘要
本应用笔记以驱动 I2C 接口的 6 轴传感器 MPU6050 为例,说明了如何使用 I2C 设备驱动接口开发应用程序,并详细讲解了 RT-Thread I2C 设备驱动框架及相关函数。
I2C(或写作 i2c、IIC、iic)总线是由 Philips 公司开发的一种简单、双向二线制(时钟 SCL、数据 SDA)同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息,是半导体芯片使用最为广泛的通信接口之一。RT-Thread 中引入了 I2C 设备驱动框架,I2C 设备驱动框架提供了基于 GPIO 模拟和硬件控制器的 2 种底层硬件接口。
本文首先描述了 RT-Thread I2C 设备驱动框架的基本情况,然后详细描述了 I2C 设备驱动接口,并使用 I2C 设备驱动接口编写 MPU6050 的驱动程序,并给出了在正点原子 STM32F4 探索者开发板上验证的代码示例。
在使用 MCU 进行项目开发的时候,往往需要用到 I2C 总线。一般来说,MCU 带有 I2C 控制器(硬件 I2C),也可以使用 MCU 的 2 个 GPIO 自行编写程序模拟 I2C 总线协议实现同样的功能。
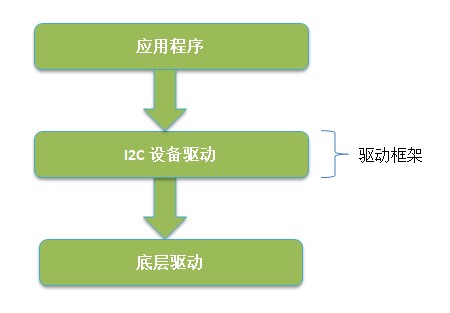
RT-Thread 提供了一套 I/O 设备管理框架,它把 I/O 设备分成了三层进行处理:应用层、I/O 设备管理层、底层驱动。I/O 设备管理框架给上层应用提供了统一的设备操作接口和 I2C 设备驱动接口,给下层提供的是底层驱动接口。应用程序通过 I/O 设备模块提供的标准接口访问底层设备,底层设备的变更不会对上层应用产生影响,这种方式使得应用程序具有很好的可移植性,应用程序可以很方便的从一个 MCU 移植到另外一个 MCU。
本文以 6 轴惯性传感器 MPU6050 为例,使用 RT-Thread I2C 设备驱动框架提供的 GPIO 模拟 I2C 控制器的方式,阐述了应用程序如何使用 I2C 设备驱动接口访问 I2C 设备。
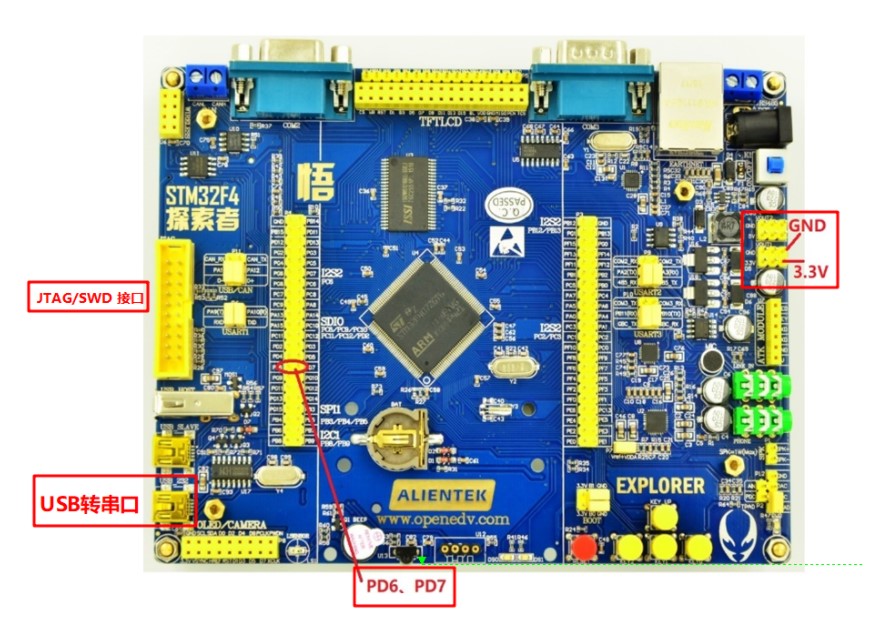
正点原子探索者 STM32F4 开发板的 MCU 是 STM32F407ZGT6,本示例使用 USB 串口(USART1)发送数据及供电,使用 SEGGER JLINK 连接 JTAG 调试。
本次实验用的 GY521 模块是一款 6 轴惯性传感器模块,板载 MPU6050。我们使用开发板的 PD6(SCL)、PD7(SDA)作为模拟 I2C 管脚,用杜邦线将 GY521 模块的 SCL 硬件连接到 PD6、SDA 连接到 PD7、GND 连接到开发板的 GND、VCC 连接到 3.3V。
本文基于正点原子 STM32F4 探索者开发板,给出了底层 I2C 驱动(GPIO 模拟方式)的添加方法和 I2C 设备的具体应用示例代码(以驱动 MPU6050 为例),包含寄存器读、写操作方法。由于 RT-Thread 上层应用 API 的通用性,因此这些代码不局限于具体的硬件平台,用户可以轻松将它移植到其它平台上。
使用 env 工具命令行进入 rt-thread\bsp\stm32f4xx-HAL 目录,然后输入 menuconfig 命令进入配置界面。
配置 shell 使用串口 1:选中 Using UART1,进入 RT-Thread Kernel —-> Kernel Device Object 菜单,修改 the device name for console 为 uart1。
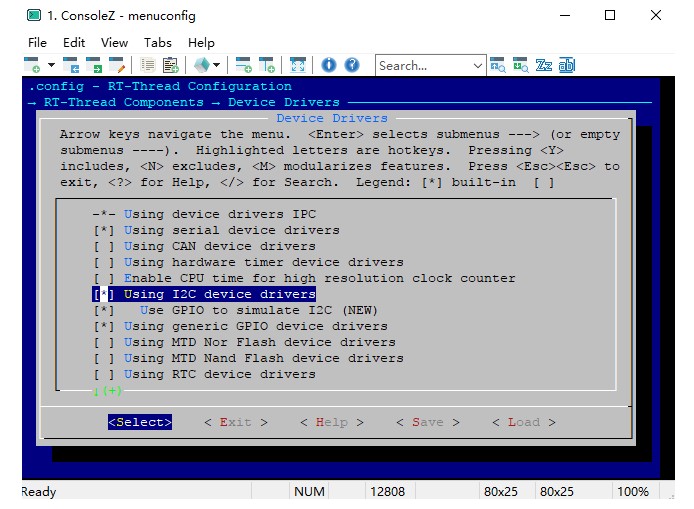
进入 RT-Thread Components —-> Device Drivers 菜单,选中 Using I2C device drivers,本示例使用 GPIO 模拟 I2C,因此还要开启 Use GPIO to simulate I2C。
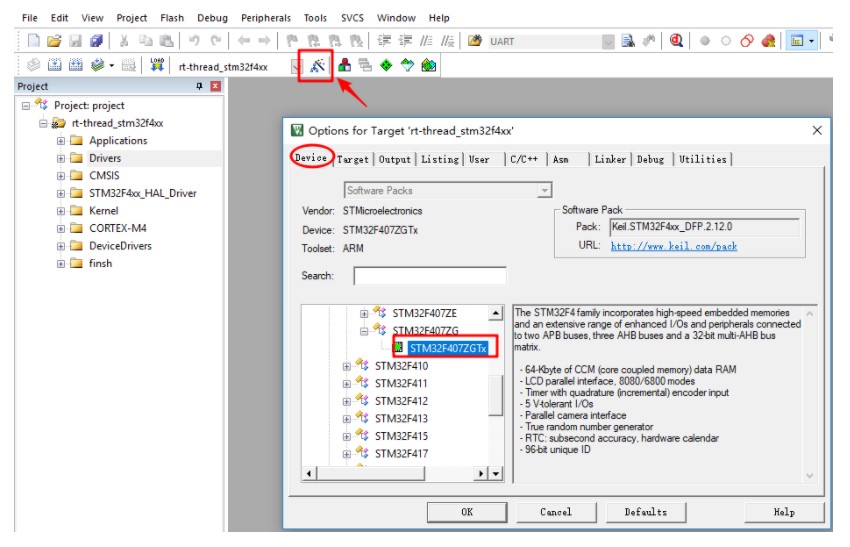
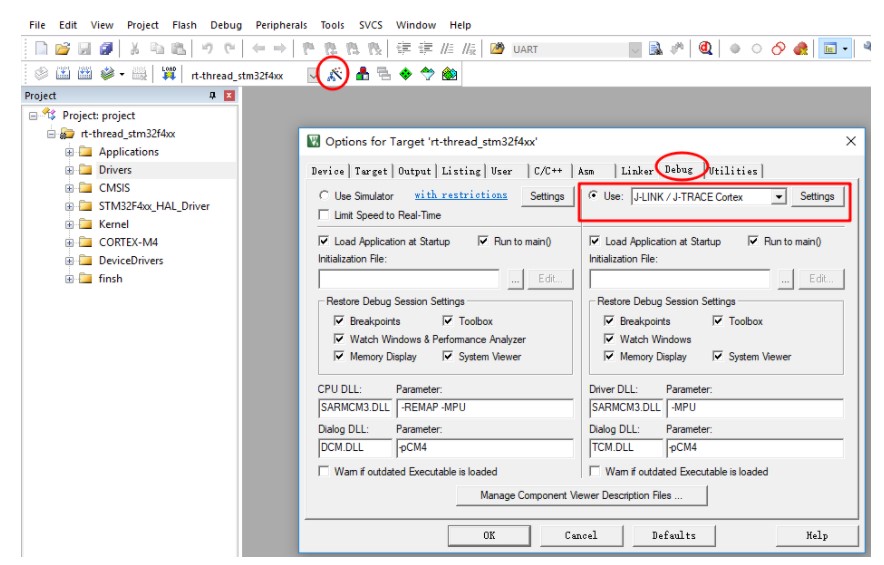
退出 menuconfig 配置界面并保存配置,在 env 命令行输入 scons —target=mdk5 -s 命令生成 mdk5 工程,新工程名为 project。使用 MDK5 打开工程,修改 MCU 型号为 STM32F407ZGTx,修改调试选项为 J-LINK。
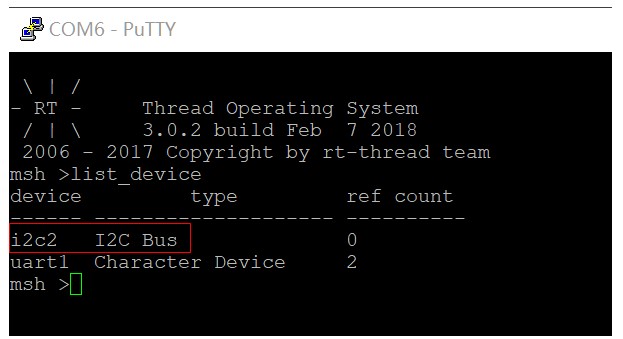
编译工程后下载程序至开发板运行。在终端 PuTTY(打开对应端口,波特率配置为 115200) 输入 list_device 命令可以看到名为 i2c2 的设备,设备类型是 I2C Bus,说明 I2C 设备驱动添加成功了。如图所示:
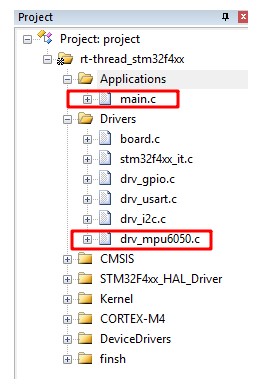
将 I2C 示例代码里的 main.c 拷贝到 \rt-thread\bsp\stm32f4xx-HAL\applications 目录,替换原有的 main.c。drv_mpu6050.c、drv_mpu6050.h 拷贝到 \rt-thread\bsp\stm32f4xx-HAL\drivers 目录,并将它们添加到工程中对应分组。如图所示:
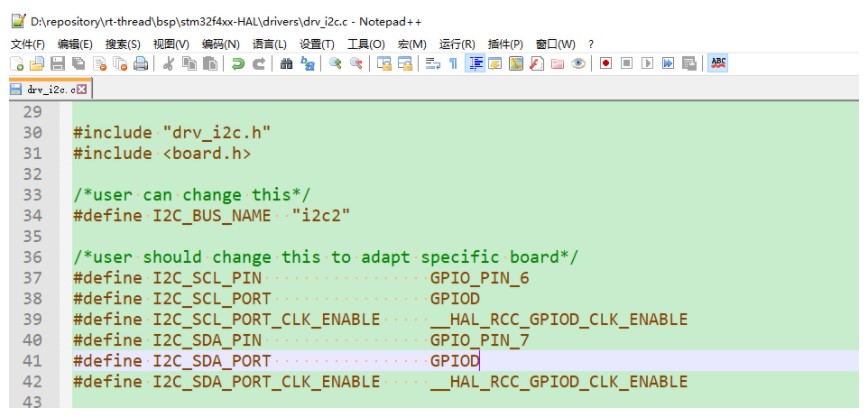
本例使用 GPIO PD6 作为 SCL、GPIO PD7 作为 SDA,I2C 总线名字是 i2c2,读者可根据需要修改 drv_i2c.c 件中如下参数以适配自己的板卡,确保 drv_mpu6050.c 中定义的宏 MPU6050_I2C_BUS_NAME 与 drv_i2c.c 中的宏 I2C_BUS_NAME 相同。本示例需要将 drv_i2c.c 默认驱动端口 GPIOB 改为 GPIOD,如下图所示:
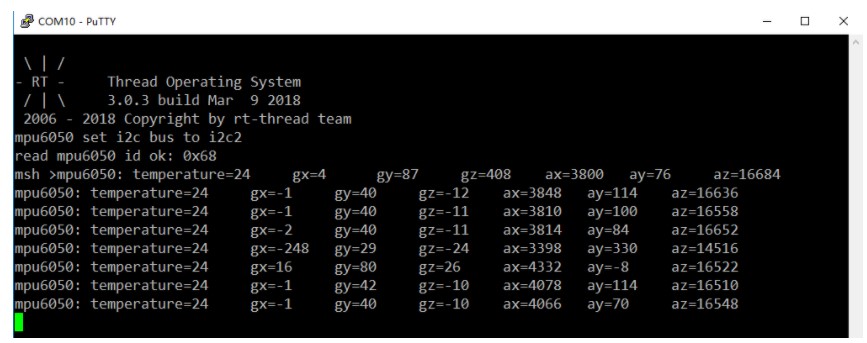
连接好 MPU6050 模块和开发板,编译工程并下载程序至开发板,复位 MCU,终端 PuTTY 会打印出读取到的 MPU6050 传感器数据,依次是温度,三轴加速度,三轴角速度:
按照前文的步骤,相信读者能很快的将 RT-ThreadI2C 设备驱动运行起来,那么如何使用 I2C 设备驱动接口开发应用程序呢?
RT-Thread I2C 设备驱动目前只支持主机模式,使用 RT-Thread I2C 设备驱动需要使用 menuconfig 工具开启宏 RT_USING_DEVICE 和 RT_USING_I2C,如果要使用 GPIO 模拟 I2C 还需开启宏 RT_USING_I2C_BITOPS。
使用 I2C 设备驱动的大致流程如下:
接下来本章将详细讲解 I2C 设备驱动接口的使用。
应用程序要使用已经由操作系统管理的 I2C 设备需要调用查找设备函数,找到 I2C 设备后才可以对该设备进行信息传送。
函数原型 : struct rt_i2c_bus_device<span> </span><em>rt_i2c_bus_device_find(const char<span> </span></em>bus_name)
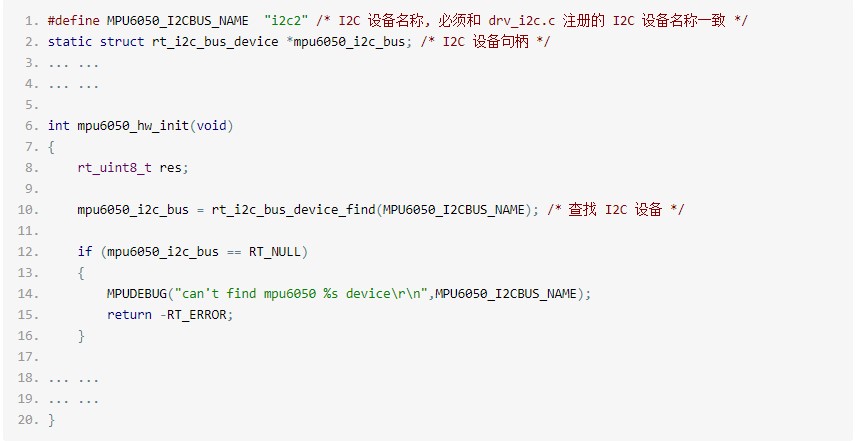
本文示例代码底层驱动 drv_mpu6050.c 中 mpu6050_hw_init() 查找设备源码如下:
RT-Thread I2C 设备驱动的核心 API 是 rt_i2c_transfer(),它传递的消息是链式结构的。可以通过消息链,实现调用一次完成多次数据的收发,此函数既可以用于发送数据,也可以用于接收数据。
函数原型 :
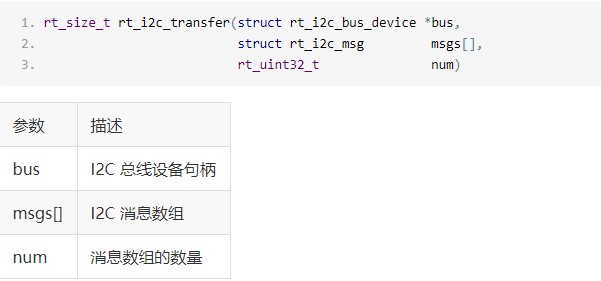
函数返回 : 成功传输的消息数组的数量
消息数组 msgs[] 类型为
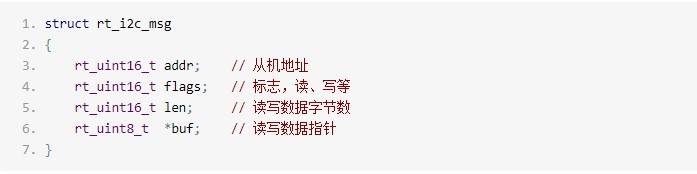
addr 从机地址支持 7 位和 10 位二进制地址(flags |= RT_I2C_ADDR_10BIT)。RT-Thread 的 I2C 设备驱动接口使用的从机地址均为不包含读写位的地址,读写位对应修改 flags。
flags 标志可选值为 i2c.h 文件中定义的宏,发送数据赋值 RT_I2C_WR,接收数据赋值 RT_I2C_RD,根据需要可以与其他宏使用位运算 “|” 组合起来使用。

用户可以调用 I2C 设备驱动接口 rt_i2c_master_send() 或者 rt_i2c_transfer() 发送数据。函数调用关系如下:
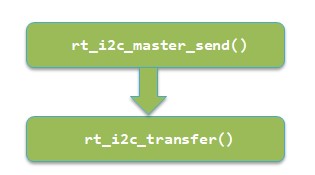
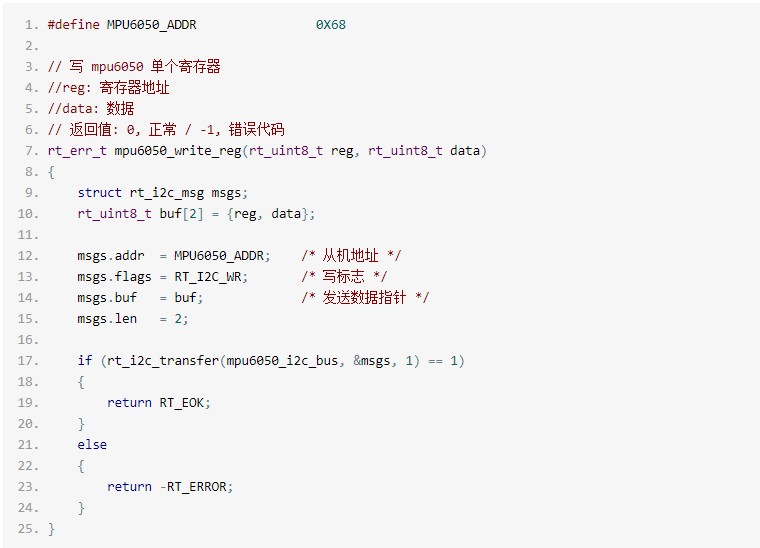
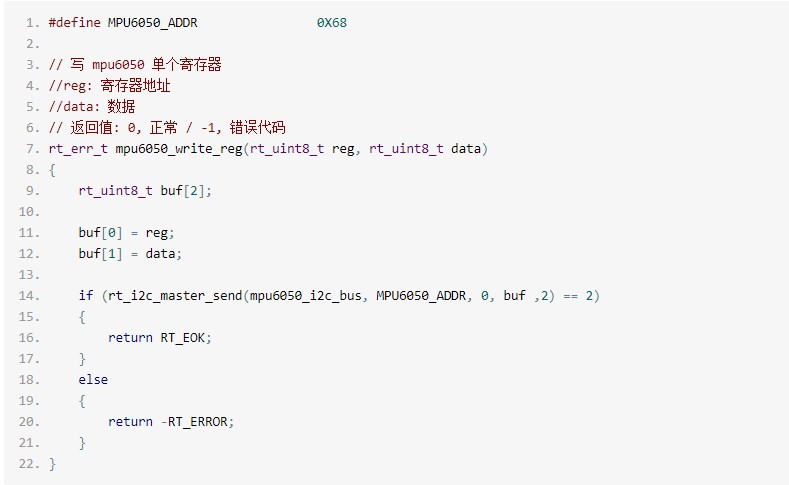
drv_mpu6050.c 中的 mpu6050_write_reg() 函数是 MCU 向 mpu6050 寄存器写数据。此函数的实现共有 2 种,分别调用了 I2C 设备驱动接口 rt_i2c_transfer() 和 rt_i2c_master_send() 实现。
本文示例使用的 MPU6050 数据手册中提到 7 位从机地址是 110100X,X 由芯片的 AD0 管脚决定,GY521 模块的 AD0 连接到了 GND,因此 MPU6050 作为从机时地址是 1101000,16 进制形式是 0x68。写 MPU6050 某个寄存器,主机首先发送从机地址 MPU6050_ADDR、读写标志 R/W 为 RT_I2C_WR(0 为写,1 为读),然 后主机发送从机寄存器地址 reg 及数据 data。
本文示例代码底层驱动 drv_mpu6050.c 发送数据源码如下:
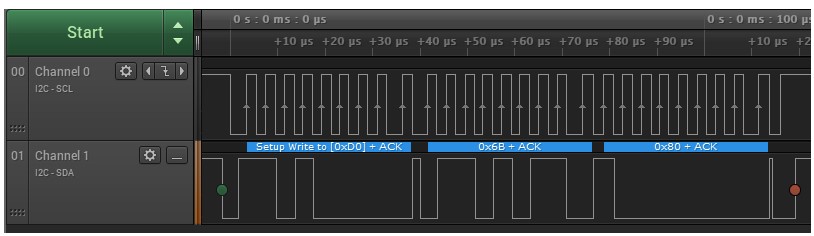
以本文示例代码其中一次调用 rt_i2c_transfer() 发送数据为例,从机 MPU6050 地址 16 进制值为 0X68,寄存器地址 reg 16 进制值为 0X6B,发送的数据 data 16 进制值为 0X80。示例波形如下图所示,第一个发送的数据是 0XD0,第一个数据的高 7 位是从机地址,最低位是读写位为写(值为 0),所以第一个数据为:0X68 << 1|0 = 0XD0,然后依次发送寄存器地址 0X6B 和数据 0X80。
函数原型 :
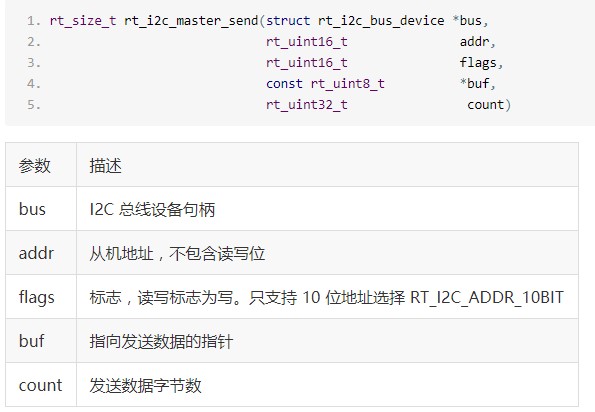
函数返回 : 成功发送的数据字节数。
此函是对 rt_i2c_transfer() 的简单封装。
本文示例代码底层驱动 drv_mpu6050.c 发送数据源码如下:
用户可以调用 I2C 设备驱动接口 rt_i2c_master_recv() 或者 rt_i2c_transfer() 接受数据。函数调用关系如下:
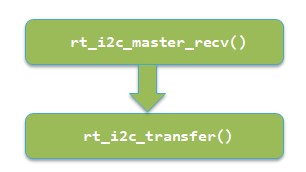
本文示例代码 drv_mpu6050.c 中的 mpu6050_read_reg() 函数是 MCU 从 MPU6050 寄存器读取数据,此函数的实现同样有 2 种方式,分别调用了 I2C 设备驱动接口 rt_i2c_transfer() 和 rt_i2c_master_recv() 实现。
读 MPU6050 某个寄存器,主机首先发送从机地址 MPU6050_ADDR、读写标志 R/W 为 RT_I2C_WR(0 为写,1 为读)、从机寄存器地址 reg 之后才能开始读设备。然后发送从机地址 MPU6050_ADDR、读写标志 R/W 为 RT_I2C_RD(0 为写,1 为读)、保存读取数据指针。
本文示例代码底层驱动 drv_mpu6050.c 接收数据源码如下:
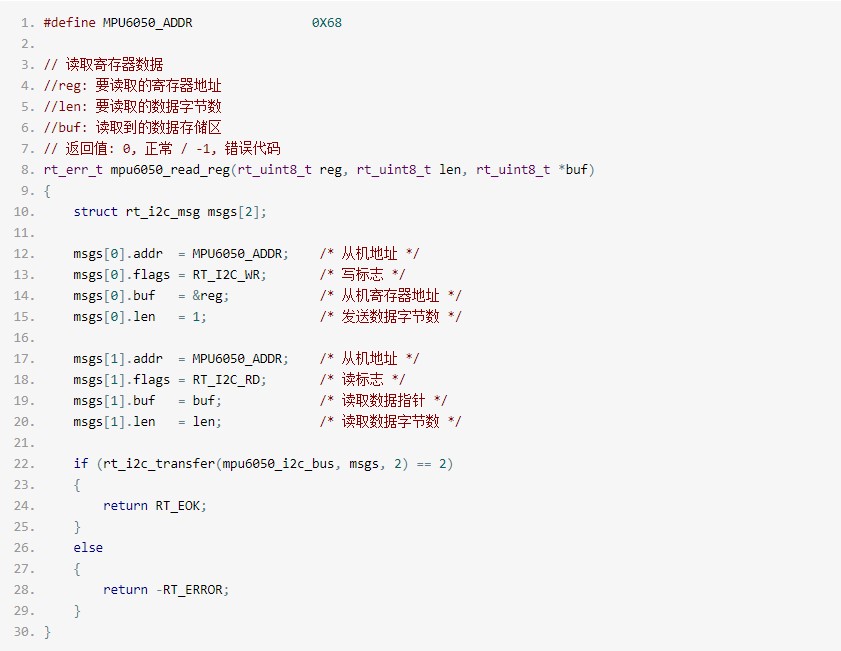
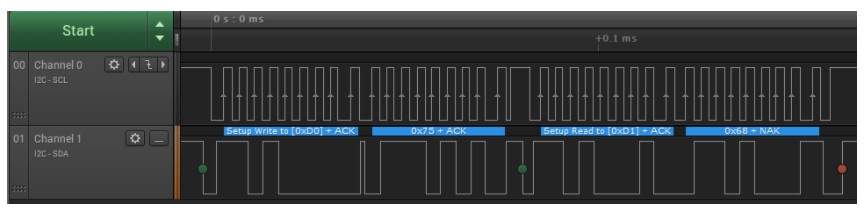
以本文示例代码其中一次调用 rt_i2c_transfer() 接收数据为例,从机 MPU6050 地址 16 进制值为 0X68,寄存器地址 reg 16 进制值为 0X75。示例波形如下图所示,第一个发送的数据是 0XD0,第一个数据的高 7 位是从机地址,最低位是读写位是写(值为 0),所以第一个数据值为:0X68 << 1|0 = 0XD0,然后发送寄存器地址 0X75。第二次发送的第一个数据为 0XD1,读写位是读(值为 1),值为:0X68 << 1 | 1 = 0XD1,然后收到读取到的数据 0X68。
函数原型 :
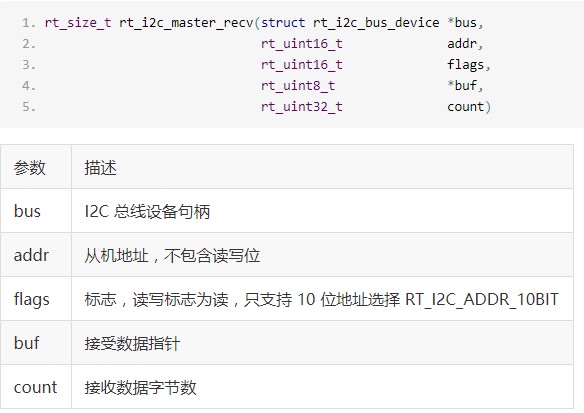
函数返回 : 成功接收的数据字节数。
此函数是对 rt_i2c_transfer() 的简单封装,只能读取数据(接收数据)。
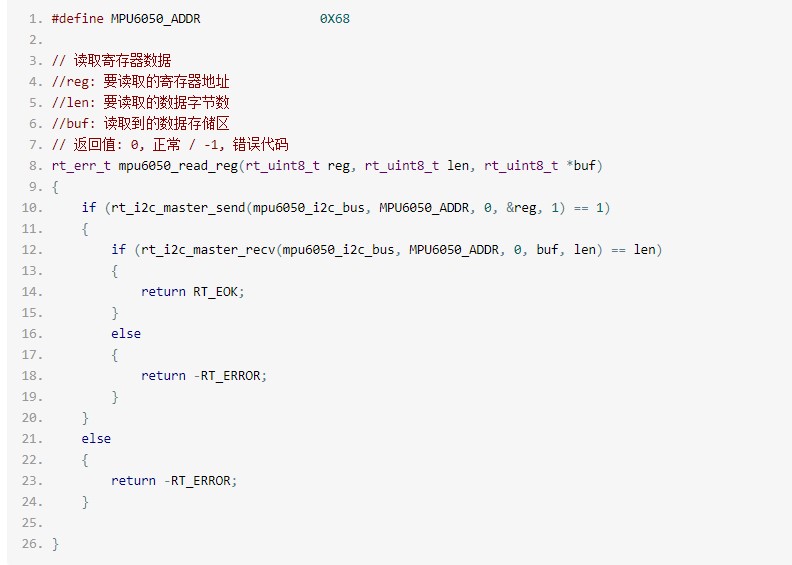
本文示例代码底层驱动 drv_mpu6050.c 接收数据源码如下:
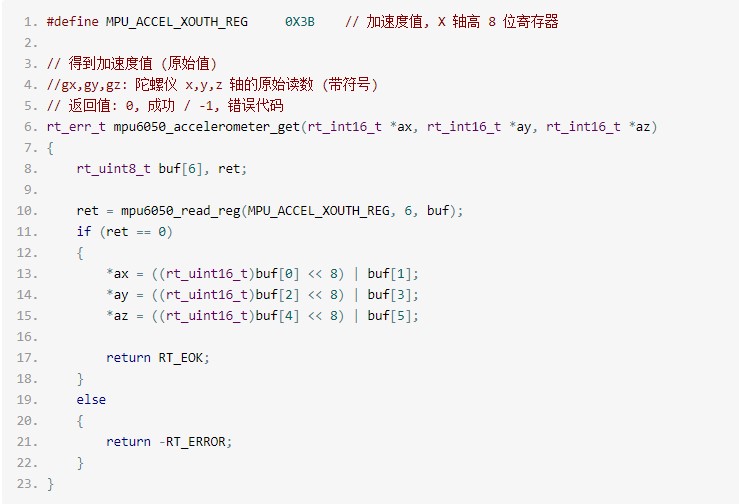
通常 I2C 接口芯片的只读寄存器分为 2 种情况,一种是单一功能寄存器,另一种是地址连续,功能相近的寄存器。例如 MPU6050 的寄存器 0X3B、0X3C、0X3D、0X3E、0X3F、0X40 依次存放的是三轴加速度 X、Y、Z 轴的高 8 位、低 8 位数据。
本文示例代码底层驱动 drv_mpu6050.c 使用 mpu6050_read_reg() 函数读取 MPU6050 的 3 轴加速度数据:
原作者:RT-Thread应用笔记
更多回帖

