MPU6050模块内部整合三轴陀螺仪、三轴加速度计以及数字运动处理器,通过IIC输出信号,可测量角加速度,通过数据处理得到pitch
Yaw、Roll角,自带数字温度传感器,VCC接5V,GND接单片机GDN、IIC接口为SCL(PB8)、SDA(PB9)、AD0设置地址角。
官方提供数据处理源码,如下:
代码:
IIC.C
//PB8(SCL) PB9(SDA)
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
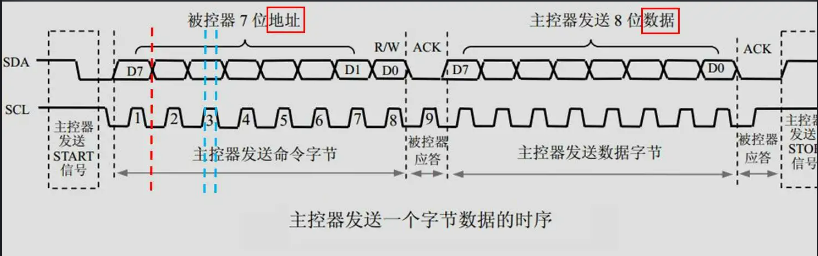
先配置IO口,查看芯片手册,SCL为PB8,SDA为PB9,接着根据时序图配置。
//起始信号
void IIC_Start(void)
{
SDA_OUT();
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;
delay_us(4);
IIC_SCL=0;
}
看时序图,刚开始SDA和SCL都是高电平,接着SDA先变低电平,SCL接着变低电平,这是起始信号。
//停止信号
void IIC_Stop(void)
{
SDA_OUT();
IIC_SCL=0;
IIC_SDA=0;
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;
delay_us(4);
}
停止信号,SCL和SDA都是低电平,SCL先变高电平,SDA接着变高电平,这是结束信号。
void IIC_Wait_ACK(void)
{
u8 ucErrTime=0;
SDA_IN();
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;
return 0;
}
//产生应答
void IIC_ACK(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
IIC总线上的数据都是8位字节传送,发送器每发送一个字节,在时钟脉冲期间释放数据线,由接收器反馈一个应答信号,ack=0(应答成功),ack=1(应答失败)
//IIC发送一个字节
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;
foR(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读一个字节
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//数据输入
for(i=0;i<8;i++)
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if(!ack)
IIC_NAck();
else
IIC_Ack();
return receive;
}
MPU6050.C(正点原子官方代码)
//初始化MPU6050
//返回值:0,成功
// 其他,错误代码
u8 MPU_Init(void)
{
u8 res;
IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}else return 1;
return 0;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
IIC_Start();
IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(IIC_Wait_Ack()) //等待应答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg); //写寄存器地址
IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
IIC_Send_Byte(buf[i]); //发送数据
if(IIC_Wait_Ack()) //等待ACK
{
IIC_Stop();
return 1;
}
}
IIC_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
IIC_Start();
IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(IIC_Wait_Ack()) //等待应答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg); //写寄存器地址
IIC_Wait_Ack(); //等待应答
IIC_Start();
IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=IIC_Read_Byte(0);//读数据,发送nACK
else *buf=IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
IIC_Stop(); //产生一个停止条件
return 0;
}
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{
IIC_Start();
IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(IIC_Wait_Ack()) //等待应答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg); //写寄存器地址
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(data);//发送数据
if(IIC_Wait_Ack()) //等待ACK
{
IIC_Stop();
return 1;
}
IIC_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
IIC_Start();
IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(reg); //写寄存器地址
IIC_Wait_Ack(); //等待应答
IIC_Start();
IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
IIC_Wait_Ack(); //等待应答
res=IIC_Read_Byte(0);//读取数据,发送nACK
IIC_Stop(); //产生一个停止条件
return res;
}

 举报
举报
举报
举报
更多回帖

