1.0 mpu6050
本篇通过Renesas RA6M4
开发板采用I2C读取mpu6050传感器的角速度、角速度和温度示例程序演示。
1.1 mpu6050介绍
MPU605050是一款广泛应用的空间运动传感器芯片,可以作为一个高性能的高性能航母和各个角速度。者的神器,被安装在各种飞行器上驰骋蓝天。
1.2 mpu6050特点
使用芯片::
3-5V(内部低压差稳压)
通信范围:标准l通信协议
芯片组16BITAD导通方式,16位数据输出输出
范围1000:±250 500 1000:±250°/s
监测范围:±2±4±8±16G
温度范围:-20℃~60℃
采用金
PCB,机器制造工艺保证质量接脚,
电源不可
接间距2.54MM
需在气体环境中工作,测量和反渗透电源

尺寸大小:

1.3 mpu6050应用
运动感测实
实测人
导航器
“
电子测量图像行”用户接口
姿态
认证方式
电子稳像(电子图像稳定)
:光学图像稳定)
2. RT-theard配置
2.1 硬件需求
1、mpu6050采集气体环境下的温度和温度,I2C连接SDA—-p504;SCL—-p506,无需关注地址库自带配置,与需要不同的sd1304
实现功能:
采用I2C读取mpu6050传感器的角加速度,角速度和温度示例
2、RA6M4开发
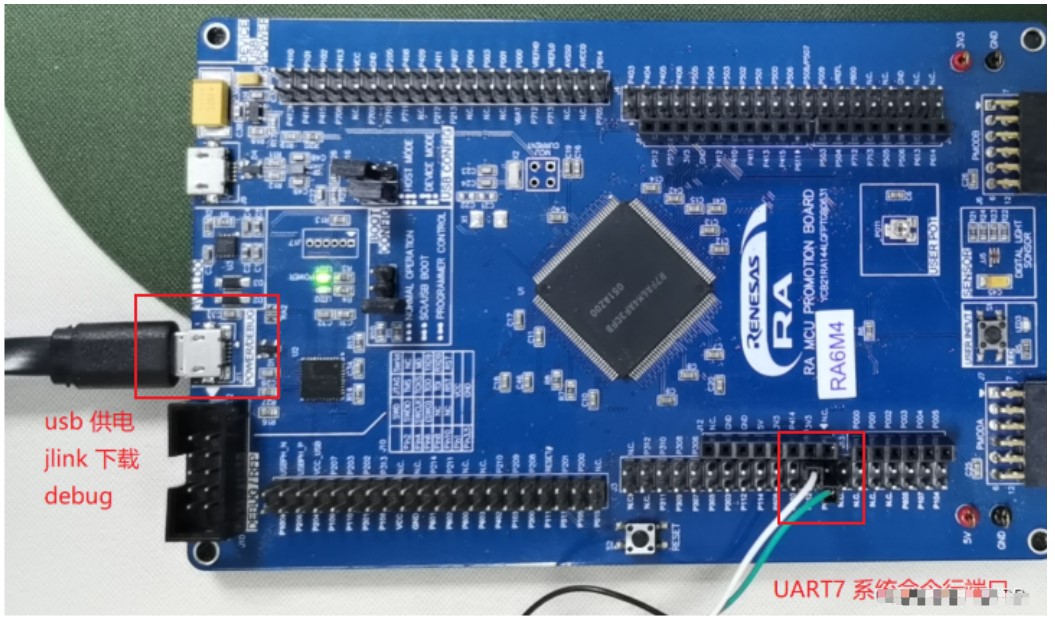
USB下载线,ch340串口和66根母线,rx—-p13;tx—-p614
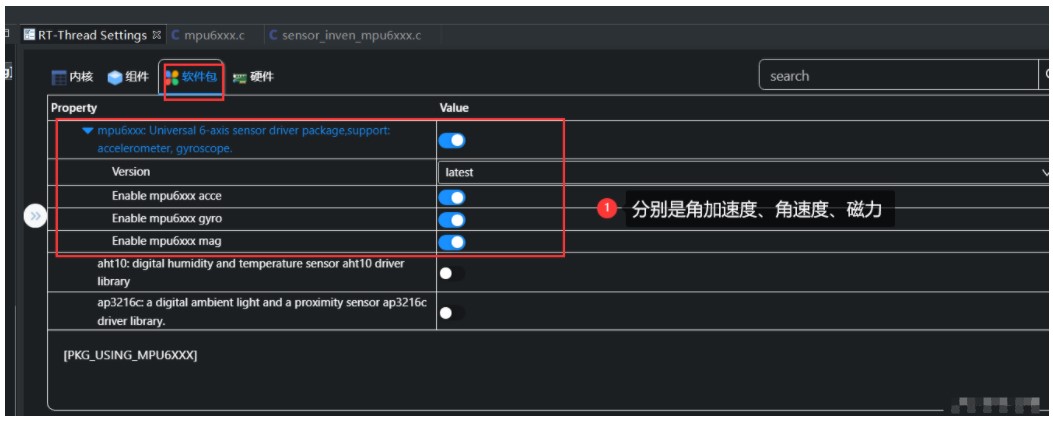
2.2 软件配置
Renesas RA 板环境配置参照: RT 开发板 M4-6M RA 环境 4 开发室 CP1 、新建项目2、点击 RT-theard 设置,在主板环境配置,然后搜索【RT-M4-6M RA 环境 4 开发】 CP1、新建项目相关软件支持包,点击添加即可,然后出现包。

3、配置sd306,直接选择配置项

4、在示例程序中。
5、在硬件中,启动I2C,设置端口DA—-p505;SCL—-p506

6、全部保存最简单的配置,更新当前配置文件
保存完是灰色,没有保存是蓝色。
3. 代码分析
1、首先加载软件包在包目录下,
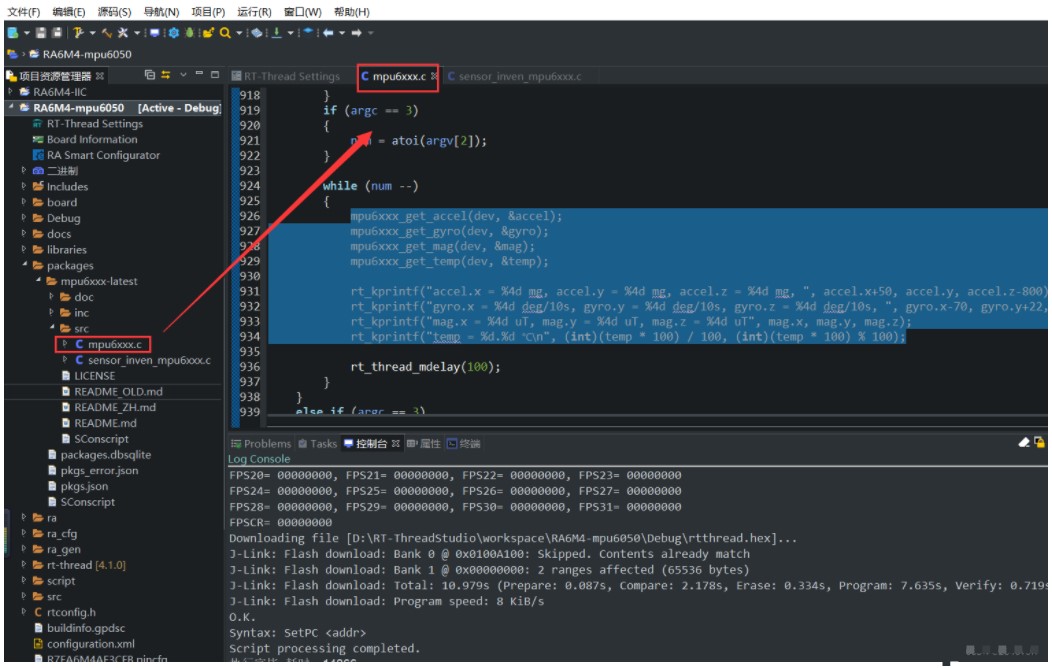
代码更改为如下
文件,否则#include "bsp_api.h"会unitx_t报错rt_unitx_t
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Iden
tifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-10-23 flybreak the first version
* 2021-09-09 scratch-er added setting and getting sensor offsets
*/
#include
#include
#include
#include
#define DBG_TAG "mpu6xxx"
#define DBG_LVL DBG_INFO
#include
#include "mpu6xxx.h"
#include "mpu6xxx_reg.h"
#ifdef PKG_USING_MPU6XXX_MAG
#include "ak8963_reg.h"
#endif
#define MPU6XXX_ACCEL_SEN (16384)
#define MPU6XXX_GYRO_SEN (1310)
#define MPU60X0_SPI_MAX_SPEED (1000 * 1000)
#define MPU60X0_TEMP_SEN (340)
#define MPU60X0_TEMP_OFFSET (36.5)
#define MPU6500_TEMP_SEN (333.87)
#define MPU6500_TEMP_OFFSET (21)
// MAG
#define AK8963_RANGE (4912)
#define AK8963_FULLSCALE (32760)
/**
* This function writes the value of the register for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param data value to write
*
* @return the writing status, RT_EOK reprensents writing the value of the register successfully.
*/
static rt_err_t mpu6xxx_write_reg(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t data)
{
rt_int8_t res = 0;
#ifdef RT_USING_I2C
struct rt_i2c_msg msgs;
rt_uint8_t buf[2] = {reg, data};
#endif
if (dev->bus->type == RT_Device_Class_I2CBUS)
{
#ifdef RT_USING_I2C
msgs.addr = dev->i2c_addr; /* slave address */
msgs.flags = RT_I2C_WR; /* write flag */
msgs.buf = buf; /* Send data pointer */
msgs.len = 2;
if (rt_i2c_transfer((struct rt_i2c_bus_device *)dev->bus, &msgs, 1) == 1)
{
res = RT_EOK;
}
else
{
res = -RT_ERROR;
}
#endif
}
else
{
#ifdef RT_USING_SPI
res = rt_spi_send_then_send((struct rt_spi_device *)dev->bus, ®, 1, &data, 1);
#endif
}
return res;
}
/**
* This function reads the value of registers for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param len number of register
* @param buf read data pointer
*
* @return the reading status, RT_EOK reprensents reading the value of registers successfully.
*/
static rt_err_t mpu6xxx_read_regs(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t len, rt_uint8_t *buf)
{
rt_int8_t res = 0;
#ifdef RT_USING_I2C
struct rt_i2c_msg msgs[2];
#endif
#ifdef RT_USING_SPI
rt_uint8_t tmp;
#endif
if (dev->bus->type == RT_Device_Class_I2CBUS)
{
#ifdef RT_USING_I2C
msgs[0].addr = dev->i2c_addr; /* Slave address */
msgs[0].flags = RT_I2C_WR; /* Write flag */
msgs[0].buf = ® /* Slave register address */
msgs[0].len = 1; /* Number of bytes sent */
msgs[1].addr = dev->i2c_addr; /* Slave address */
msgs[1].flags = RT_I2C_RD; /* Read flag */
msgs[1].buf = buf; /* Read data pointer */
msgs[1].len = len; /* Number of bytes read */
if (rt_i2c_transfer((struct rt_i2c_bus_device *)dev->bus, msgs, 2) == 2)
{
res = RT_EOK;
}
else
{
res = -RT_ERROR;
}
#endif
}
else
{
#ifdef RT_USING_SPI
//The first bit of the first byte contains the Read/Write bit and indicates the Read (1) or Write (0) operation.
tmp = reg | 0x80;
res = rt_spi_send_then_recv((struct rt_spi_device *)dev->bus, &tmp, 1, buf, len);
#endif
}
return res;
}
/**
* This function writes a bit value of registers for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param bit the position of the register
* @param data value to write
*
* @return the writing status, RT_EOK reprensents writing a bit value of registers successfully.
*/
static rt_err_t mpu6xxx_write_bit(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t bit, rt_uint8_t data)
{
rt_uint8_t byte;
rt_err_t res;
res = mpu6xxx_read_regs(dev, reg, 1, &byte);
if (res != RT_EOK)
{
return res;
}
byte = (data != 0) ? (byte | (1 << bit)) : (byte & ~(1 << bit));
return mpu6xxx_write_reg(dev, reg, byte);
}
/**
* This function reads a bit value of registers for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param bit the position of the register
* @param data read data pointer
*
* @return the reading status, RT_EOK reprensents reading a bit value of registers successfully.
*/
static rt_err_t mpu6xxx_read_bit(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t bit, rt_uint8_t *data)
{
rt_uint8_t byte;
rt_err_t res;
res = mpu6xxx_read_regs(dev, reg, 1, &byte);
if (res != RT_EOK)
{
return res;
}
*data = byte & (1 << bit);
return RT_EOK;
}
/**
* This function writes multi-bit value of registers for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param start_bit the start position of the register
* @param len number of bits to write
* @param data value to write
*
* @return the writing status, RT_EOK reprensents writing multi-bit value of registers successfully.
*/
static rt_err_t mpu6xxx_write_bits(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t start_bit, rt_uint8_t len, rt_uint8_t data)
{
rt_uint8_t byte, mask;
rt_err_t res;
res = mpu6xxx_read_regs(dev, reg, 1, &byte);
if (res != RT_EOK)
{
return res;
}
mask = ((1 << len) - 1) << (start_bit - len + 1);
data <<= (start_bit - len + 1); // shift data into correct position
data &= mask; // zero all non-important bits in data
byte &= ~(mask); // zero all important bits in existing byte
byte |= data; // combine data with existing byte
return mpu6xxx_write_reg(dev, reg, byte);
}
/**
* This function reads multi-bit value of registers for mpu6xxx
*
* @param dev the pointer of device driver structure
* @param reg the register for mpu6xxx
* @param start_bit the start position of the register
* @param len number of bits to write
* @param data read data pointer
*
* @return the reading status, RT_EOK reprensents reading multi-bit value of registers successfully.
*/
static rt_err_t mpu6xxx_read_bits(struct mpu6xxx_device *dev, rt_uint8_t reg, rt_uint8_t start_bit, rt_uint8_t len, rt_uint8_t *data)
{
rt_uint8_t byte, mask;
rt_err_t res;
res = mpu6xxx_read_regs(dev, reg, 1, &byte);
if (res != RT_EOK)
{
return res;
}
mask = ((1 << len) - 1) << (start_bit - len + 1);
byte &= mask;
byte >>= (start_bit - len + 1);
*data = byte;
return RT_EOK;
}
// MAG
#ifdef PKG_USING_MPU6XXX_MAG
#define MAG_READ_DELAY_TIME 50
static void mpu92_mag_write_reg(struct mpu6xxx_device *dev, rt_uint8_t addr, rt_uint8_t data)
{
rt_uint8_t status = 0;
rt_uint32_t timeout = MAG_READ_DELAY_TIME;
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV4_ADDR, AK8963_I2C_ADDR);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV4_REG, addr);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV4_DO, data);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV4_CTRL, MPU6500_I2C_SLVx_EN);
do
{
mpu6xxx_read_regs(dev, MPU6XXX_RA_I2C_MST_STATUS, 1, &status);
rt_thread_mdelay(1);
} while (((status & MPU6500_I2C_SLV4_DONE) == 0) && (timeout--));
}
#endif // PKG_USING_MPU6XXX_MAG
/**
* This function gets the raw data of the accelerometer
*
* @param dev the pointer of device driver structure
* @param accel the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
static rt_err_t mpu6xxx_get_accel_raw(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *accel)
{
rt_uint8_t buffer[6];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_ACCEL_XOUT_H, 6, buffer);
if (res != RT_EOK)
{
return res;
}
accel->x = ((rt_uint16_t)buffer[0] << 8) + buffer[1];
accel->y = ((rt_uint16_t)buffer[2] << 8) + buffer[3];
accel->z = ((rt_uint16_t)buffer[4] << 8) + buffer[5];
return RT_EOK;
}
/**
* This function gets the raw data of the gyroscope
*
* @param dev the pointer of device driver structure
* @param gyro the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
static rt_err_t mpu6xxx_get_gyro_raw(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *gyro)
{
rt_uint8_t buffer[6];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_GYRO_XOUT_H, 6, buffer);
if (res != RT_EOK)
{
return res;
}
gyro->x = ((rt_uint16_t)buffer[0] << 8) + buffer[1];
gyro->y = ((rt_uint16_t)buffer[2] << 8) + buffer[3];
gyro->z = ((rt_uint16_t)buffer[4] << 8) + buffer[5];
return RT_EOK;
}
#ifdef PKG_USING_MPU6XXX_MAG
/**
* This function gets the raw data of the magnetometer
*
* @param dev the pointer of device driver structure
* @param mag the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
static rt_err_t mpu6xxx_get_mag_raw(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *mag)
{
rt_uint8_t buffer[8];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_EXT_SENS_DATA_00, 8, buffer);
if (res != RT_EOK)
{
return res;
}
mag->x = ((rt_uint16_t)buffer[2] << 8) + buffer[1];
mag->y = ((rt_uint16_t)buffer[4] << 8) + buffer[3];
mag->z = ((rt_uint16_t)buffer[6] << 8) + buffer[5];
return RT_EOK;
}
#endif
/**
* This function gets the raw data of the temperature
*
* @param dev the pointer of device driver structure
* @param temp read data pointer
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
static rt_err_t mpu6xxx_get_temp_raw(struct mpu6xxx_device *dev, rt_int16_t *temp)
{
rt_uint8_t buffer[2];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_TEMP_OUT_H, 2, buffer);
if (res != RT_EOK)
{
return res;
}
*temp = ((rt_uint16_t)buffer[0] << 8) + buffer[1];
return RT_EOK;
}
/**
* This function gets mpu6xxx parameters.
*
* @param dev the pointer of device driver structure
* @param cmd Configuration item
* @param param read data pointer
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
static rt_err_t mpu6xxx_get_param(struct mpu6xxx_device *dev, enum mpu6xxx_cmd cmd, rt_uint16_t *param)
{
rt_uint8_t data = 0;
rt_err_t res = RT_EOK;
RT_ASSERT(dev);
switch (cmd)
{
case MPU6XXX_GYRO_RANGE: /* Gyroscope full scale range */
res = mpu6xxx_read_bits(dev, MPU6XXX_RA_GYRO_CONFIG, MPU6XXX_GCONFIG_FS_SEL_BIT, MPU6XXX_GCONFIG_FS_SEL_LENGTH, &data);
*param = data;
break;
case MPU6XXX_ACCEL_RANGE: /* Accelerometer full scale range */
res = mpu6xxx_read_bits(dev, MPU6XXX_RA_ACCEL_CONFIG, MPU6XXX_ACONFIG_AFS_SEL_BIT, MPU6XXX_ACONFIG_AFS_SEL_LENGTH, &data);
*param = data;
break;
case MPU6XXX_DLPF_CONFIG: /* Digital Low Pass Filter */
res = mpu6xxx_read_bits(dev, MPU6XXX_RA_CONFIG, MPU6XXX_CFG_DLPF_CFG_BIT, MPU6XXX_CFG_DLPF_CFG_LENGTH, &data);
*param = data;
break;
case MPU6XXX_SAMPLE_RATE: /* Sample Rate */
/* Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV) */
res = mpu6xxx_read_bits(dev, MPU6XXX_RA_CONFIG, MPU6XXX_CFG_DLPF_CFG_BIT, MPU6XXX_CFG_DLPF_CFG_LENGTH, &data);
if (res != RT_EOK)
{
break;
}
if (data == 0 || data == 7) /* dlpf is disable */
{
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_SMPLRT_DIV, 1, &data);
*param = 8000 / (data + 1);
}
else /* dlpf is enable */
{
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_SMPLRT_DIV, 1, &data);
*param = 1000 / (data + 1);
}
break;
case MPU6XXX_SLEEP: /* sleep mode */
res = mpu6xxx_read_bit(dev, MPU6XXX_RA_PWR_MGMT_1, MPU6XXX_PWR1_SLEEP_BIT, &data);
*param = data;
break;
}
return res;
}
/**
* This function set mpu6xxx parameters.
*
* @param dev the pointer of device driver structure
* @param cmd Configuration item
* @param param Configuration item parameter
*
* @return the setting status, RT_EOK reprensents setting the parameter successfully.
*/
rt_err_t mpu6xxx_set_param(struct mpu6xxx_device *dev, enum mpu6xxx_cmd cmd, rt_uint16_t param)
{
rt_uint8_t data = 0;
rt_err_t res = RT_EOK;
RT_ASSERT(dev);
switch (cmd)
{
case MPU6XXX_GYRO_RANGE: /* Gyroscope full scale range */
res = mpu6xxx_write_bits(dev, MPU6XXX_RA_GYRO_CONFIG, MPU6XXX_GCONFIG_FS_SEL_BIT, MPU6XXX_GCONFIG_FS_SEL_LENGTH, param);
dev->config.gyro_range = param;
break;
case MPU6XXX_ACCEL_RANGE: /* Accelerometer full scale range */
res = mpu6xxx_write_bits(dev, MPU6XXX_RA_ACCEL_CONFIG, MPU6XXX_ACONFIG_AFS_SEL_BIT, MPU6XXX_ACONFIG_AFS_SEL_LENGTH, param);
dev->config.accel_range = param;
break;
case MPU6XXX_DLPF_CONFIG: /* Digital Low Pass Filter */
res = mpu6xxx_write_bits(dev, MPU6XXX_RA_CONFIG, MPU6XXX_CFG_DLPF_CFG_BIT, MPU6XXX_CFG_DLPF_CFG_LENGTH, param);
break;
case MPU6XXX_SAMPLE_RATE: /* Sample Rate = 16-bit unsigned value.
Sample Rate = [1000 - 4]HZ when dlpf is enable
Sample Rate = [8000 - 32]HZ when dlpf is disable */
//Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV)
res = mpu6xxx_read_bits(dev, MPU6XXX_RA_CONFIG, MPU6XXX_CFG_DLPF_CFG_BIT, MPU6XXX_CFG_DLPF_CFG_LENGTH, &data);
if (res != RT_EOK)
{
break;
}
if (data == 0 || data == 7) /* dlpf is disable */
{
if (param > 8000)
data = 0;
else if (param < 32)
data = 0xFF;
else
data = 8000 / param - 1;
}
else /* dlpf is enable */
{
if (param > 1000)
data = 0;
else if (param < 4)
data = 0xFF;
else
data = 1000 / param - 1;
}
res = mpu6xxx_write_reg(dev, MPU6XXX_RA_SMPLRT_DIV, data);
break;
case MPU6XXX_SLEEP: /* Configure sleep mode */
res = mpu6xxx_write_bit(dev, MPU6XXX_RA_PWR_MGMT_1, MPU6XXX_PWR1_SLEEP_BIT, param);
break;
}
return res;
}
/**
* This function gets the data of the accelerometer, unit: mg(mm/s^2)
*
* @param dev the pointer of device driver structure
* @param accel the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
rt_err_t mpu6xxx_get_accel(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *accel)
{
struct mpu6xxx_3axes tmp;
rt_uint16_t sen;
rt_err_t res;
res = mpu6xxx_get_accel_raw(dev, &tmp);
if (res != RT_EOK)
{
return res;
}
sen = MPU6XXX_ACCEL_SEN >> dev->config.accel_range;
accel->x = (rt_int32_t)tmp.x * 1000 / sen;
accel->y = (rt_int32_t)tmp.y * 1000 / sen;
accel->z = (rt_int32_t)tmp.z * 1000 / sen;
return RT_EOK;
}
/**
* This function gets the data of the gyroscope, unit: deg/10s
* Here deg/10s means 10 times higher precision than deg/s.
*
* @param dev the pointer of device driver structure
* @param gyro the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
rt_err_t mpu6xxx_get_gyro(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *gyro)
{
struct mpu6xxx_3axes tmp;
rt_uint16_t sen;
rt_err_t res;
res = mpu6xxx_get_gyro_raw(dev, &tmp);
if (res != RT_EOK)
{
return res;
}
sen = MPU6XXX_GYRO_SEN >> dev->config.gyro_range;
gyro->x = (rt_int32_t)tmp.x * 100 / sen;
gyro->y = (rt_int32_t)tmp.y * 100 / sen;
gyro->z = (rt_int32_t)tmp.z * 100 / sen;
return RT_EOK;
}
#ifdef PKG_USING_MPU6XXX_MAG
/**
* This function gets the data of the magnetometer, unit: uT
*
* @param dev the pointer of device driver structure
* @param gyro the pointer of 3axes structure for receive data
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
rt_err_t mpu6xxx_get_mag(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *mag)
{
struct mpu6xxx_3axes tmp;
rt_err_t res;
res = mpu6xxx_get_mag_raw(dev, &tmp);
if (res != RT_EOK)
{
return res;
}
mag->x = ((rt_int32_t)tmp.x * AK8963_RANGE) / AK8963_FULLSCALE;
mag->y = ((rt_int32_t)tmp.y * AK8963_RANGE) / AK8963_FULLSCALE;
mag->z = ((rt_int32_t)tmp.z * AK8963_RANGE) / AK8963_FULLSCALE;
return RT_EOK;
}
#endif
/**
* This function gets the data of the temperature, unit: Centigrade
*
* @param dev the pointer of device driver structure
* @param temp read data pointer
*
* @return the reading status, RT_EOK reprensents reading the data successfully.
*/
rt_err_t mpu6xxx_get_temp(struct mpu6xxx_device *dev, float *temp)
{
rt_int16_t tmp;
rt_err_t res;
res = mpu6xxx_get_temp_raw(dev, &tmp);
if (res != RT_EOK)
{
return res;
}
if (dev->id == MPU6050_WHO_AM_I)
{
/* mpu60x0: Temperature in degrees C = (TEMP_OUT Register Value as a signed quantity)/340 + 36.53 */
*temp = (double)tmp / MPU60X0_TEMP_SEN + MPU60X0_TEMP_OFFSET;
}
else
{
/* mpu6500: ((TEMP_OUT - RoomTemp_Offset)/Temp_Sensitivity)+ 21degC */
*temp = (double)tmp / MPU6500_TEMP_SEN + MPU6500_TEMP_OFFSET;
}
return RT_EOK;
}
/**
* This function sets the offset of the accelerometer
*
* @param dev the pointer of device driver structure
* @param offset the pointer of 3axes structure of offsets
*
* @return the setting status, RT_EOK reprensents setting the offsets successfully.
*/
rt_err_t mpu6xxx_set_accel_offset(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *offset)
{
rt_err_t res=0;
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_XA_OFFS_H, (offset->x)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_XA_OFFS_L_TC, (offset->x)&0x00ff);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_YA_OFFS_H, (offset->y)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_YA_OFFS_L_TC, (offset->y)&0x00ff);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_ZA_OFFS_H, (offset->z)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_ZA_OFFS_L_TC, (offset->z)&0x00ff);
return res;
}
/**
* This function gets the offset of the accelerometer
*
* @param dev the pointer of device driver structure
* @param offset the pointer of 3axes structure of offsets
*
* @return the setting status, RT_EOK reprensents reading the offsets successfully.
*/
rt_err_t mpu6xxx_get_accel_offset(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *offset)
{
rt_uint8_t buffer[6];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_XA_OFFS_H, 6, buffer);
if (res != RT_EOK)
{
return res;
}
offset->x = ((rt_uint16_t)buffer[0] << 8) + buffer[1];
offset->y = ((rt_uint16_t)buffer[2] << 8) + buffer[3];
offset->z = ((rt_uint16_t)buffer[4] << 8) + buffer[5];
return RT_EOK;
}
/**
* This function sets the offset of the gyroscope
*
* @param dev the pointer of device driver structure
* @param offset the pointer of 3axes structure of offsets
*
* @return the setting status, RT_EOK reprensents setting the offsets successfully.
*/
rt_err_t mpu6xxx_set_gyro_offset(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *offset)
{
rt_err_t res=0;
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_XG_OFFS_USRH, (offset->x)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_XG_OFFS_USRL, (offset->x)&0x00ff);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_YG_OFFS_USRH, (offset->y)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_YG_OFFS_USRL, (offset->y)&0x00ff);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_ZG_OFFS_USRH, (offset->z)>>8);
res |= mpu6xxx_write_reg(dev, MPU6XXX_RA_ZG_OFFS_USRL, (offset->z)&0x00ff);
return res;
}
/**
* This function gets the offset of the gyroscope
*
* @param dev the pointer of device driver structure
* @param offset the pointer of 3axes structure of offsets
*
* @return the setting status, RT_EOK reprensents reading the offsets successfully.
*/
rt_err_t mpu6xxx_get_gyro_offset(struct mpu6xxx_device *dev, struct mpu6xxx_3axes *offset)
{
rt_uint8_t buffer[6];
rt_err_t res;
res = mpu6xxx_read_regs(dev, MPU6XXX_RA_XG_OFFS_USRH, 6, buffer);
if (res != RT_EOK)
{
return res;
}
offset->x = ((rt_uint16_t)buffer[0] << 8) + buffer[1];
offset->y = ((rt_uint16_t)buffer[2] << 8) + buffer[3];
offset->z = ((rt_uint16_t)buffer[4] << 8) + buffer[5];
return RT_EOK;
}
/**
* This function initialize the mpu6xxx device.
*
* @param dev_name the name of transfer device
* @param param the i2c device address for i2c communication, RT_NULL for spi
*
* @return the pointer of device driver structure, RT_NULL reprensents initialization failed.
*/
struct mpu6xxx_device *mpu6xxx_init(const char *dev_name, rt_uint8_t param)
{
struct mpu6xxx_device *dev = RT_NULL;
rt_uint8_t reg = 0xFF, res = RT_EOK;
RT_ASSERT(dev_name);
dev = rt_calloc(1, sizeof(struct mpu6xxx_device));
if (dev == RT_NULL)
{
LOG_E("Can't allocate memory for mpu6xxx device on '%s' ", dev_name);
goto __exit;
}
dev->bus = rt_device_find(dev_name);
if (dev->bus == RT_NULL)
{
LOG_E("Can't find device:'%s'", dev_name);
goto __exit;
}
if (dev->bus->type == RT_Device_Class_I2CBUS)
{
if (param != RT_NULL)
{
dev->i2c_addr = param;
}
else
{
/* find mpu6xxx device at address: 0x68 */
dev->i2c_addr = MPU6XXX_ADDRESS_AD0_LOW;
if (mpu6xxx_read_regs(dev, MPU6XXX_RA_WHO_AM_I, 1, ®) != RT_EOK)
{
/* find mpu6xxx device at address 0x69 */
dev->i2c_addr = MPU6XXX_ADDRESS_AD0_HIGH;
if (mpu6xxx_read_regs(dev, MPU6XXX_RA_WHO_AM_I, 1, ®) != RT_EOK)
{
LOG_E("Can't find device at '%s'!", dev_name);
goto __exit;
}
}
LOG_D("Device i2c address is:'0x%x'!", dev->i2c_addr);
}
}
else if (dev->bus->type == RT_Device_Class_SPIDevice)
{
#ifdef RT_USING_SPI
struct rt_spi_configuration cfg;
cfg.data_width = 8;
cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB;
cfg.max_hz = MPU60X0_SPI_MAX_SPEED; /* Set spi max speed */
rt_spi_configure((struct rt_spi_device *)dev->bus, &cfg);
#endif
}
else
{
LOG_E("Unsupported device:'%s'!", dev_name);
goto __exit;
}
if (mpu6xxx_read_regs(dev, MPU6XXX_RA_WHO_AM_I, 1, ®) != RT_EOK)
{
LOG_E("Failed to read device id!");
goto __exit;
}
dev->id = reg;
switch (dev->id)
{
case MPU6050_WHO_AM_I:
LOG_I("Find device: mpu6050!");
break;
case MPU6500_WHO_AM_I:
LOG_I("Find device: mpu6500!");
break;
case MPU9250_WHO_AM_I:
LOG_I("Find device: mpu9250!");
break;
case ICM20608G_WHO_AM_I:
case ICM20608D_WHO_AM_I:
LOG_I("Find device: icm20608!");
break;
case 0xFF:
LOG_E("No device connection!");
goto __exit;
default:
LOG_W("Unknown device id: 0x%x!", reg);
}
res += mpu6xxx_get_param(dev, MPU6XXX_ACCEL_RANGE, &dev->config.accel_range);
res += mpu6xxx_get_param(dev, MPU6XXX_GYRO_RANGE, &dev->config.gyro_range);
res += mpu6xxx_write_bits(dev, MPU6XXX_RA_PWR_MGMT_1, MPU6XXX_PWR1_CLKSEL_BIT, MPU6XXX_PWR1_CLKSEL_LENGTH, MPU6XXX_CLOCK_PLL_XGYRO);
res += mpu6xxx_set_param(dev, MPU6XXX_GYRO_RANGE, MPU6XXX_GYRO_RANGE_250DPS);
res += mpu6xxx_set_param(dev, MPU6XXX_ACCEL_RANGE, MPU6XXX_ACCEL_RANGE_2G);
res += mpu6xxx_set_param(dev, MPU6XXX_SLEEP, MPU6XXX_SLEEP_DISABLE);
#ifdef PKG_USING_MPU6XXX_MAG
mpu6xxx_write_reg(dev, MPU6XXX_RA_USER_CTRL, 0x20);
mpu92_mag_write_reg(dev, AK8963_REG_CNTL2, 0x01); /* [0] Reset Device */
rt_thread_mdelay(1);
mpu92_mag_write_reg(dev, AK8963_REG_CNTL1, 0x00); /* [1] Power-down mode */
mpu92_mag_write_reg(dev, AK8963_REG_CNTL1, 0x0F); /* [2] Fuse ROM access mode */
mpu92_mag_write_reg(dev, AK8963_REG_CNTL1, 0x00); /* [3] Power-down mode */
rt_thread_mdelay(1); // 100us
mpu92_mag_write_reg(dev, AK8963_REG_CNTL1, 0x16); /* [4] 16bits and Continuous measurement mode 2 */
/* config mpu9250 i2c */
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_MST_CTRL, 0x5D);
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV0_ADDR, AK8963_I2C_ADDR | 0x80);
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV0_REG, AK8963_REG_ST1);
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV0_CTRL, MPU6500_I2C_SLVx_EN | 8);
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_SLV4_CTRL, 0x09);
rt_thread_mdelay(2);
mpu6xxx_write_reg(dev, MPU6XXX_RA_I2C_MST_DELAY_CTRL, 0x81);
#endif
if (res == RT_EOK)
{
LOG_I("Device init succeed!");
}
else
{
LOG_W("Error in device initialization!");
}
return dev;
__exit:
if (dev != RT_NULL)
{
rt_free(dev);
}
return RT_NULL;
}
/**
* This function releases memory
*
* @param dev the pointer of device driver structure
*/
void mpu6xxx_deinit(struct mpu6xxx_device *dev)
{
RT_ASSERT(dev);
rt_free(dev);
}
static void mpu6xxx(int argc, char **argv)
{
static struct mpu6xxx_device *dev = RT_NULL;
/* If the number of arguments less than 2 */
if (argc < 2)
{
rt_kprintf("
");
rt_kprintf("mpu6xxx [OPTION] [PARAM]
");
rt_kprintf(" probe Probe mpu6xxx by given name,dev_name such as i2c1
");
rt_kprintf(" sr Set sample rate to var
");
rt_kprintf(" var = [1000 - 4] when dlpf is enable
");
rt_kprintf(" var = [8000 - 32] when dlpf is disable
");
rt_kprintf(" gr Set gyro range to var
");
rt_kprintf(" var = [0 - 3] means [250 - 2000DPS]
");
rt_kprintf(" ar Set accel range to var
");
rt_kprintf(" var = [0 - 3] means [2 - 16G]
");
rt_kprintf(" sleep Set sleep status
");
rt_kprintf(" var = 0 means disable, = 1 means enable
");
rt_kprintf(" read [num] read [num] times mpu6xxx
");
rt_kprintf(" num default 5
");
return ;
}
else if (!strcmp(argv[1], "read"))
{
struct mpu6xxx_3axes accel, gyro, mag;
float temp;
rt_uint16_t num = 5;
if (dev == RT_NULL)
{
rt_kprintf("Please probe mpu6xxx first!
");
return ;
}
if (argc == 3)
{
num = atoi(argv[2]);
}
while (num --)
{
mpu6xxx_get_accel(dev, &accel);
mpu6xxx_get_gyro(dev, &gyro);
mpu6xxx_get_mag(dev, &mag);
mpu6xxx_get_temp(dev, &temp);
rt_kprintf("accel.x = %4d mg, accel.y = %4d mg, accel.z = %4d mg, ", accel.x+50, accel.y, accel.z-800);
rt_kprintf("gyro.x = %4d deg/10s, gyro.y = %4d deg/10s, gyro.z = %4d deg/10s, ", gyro.x-70, gyro.y+22, gyro.z-9);
rt_kprintf("mag.x = %4d uT, mag.y = %4d uT, mag.z = %4d uT", mag.x, mag.y, mag.z);
rt_kprintf("temp = %d.%d ℃
", (int)(temp * 100) / 100, (int)(temp * 100) % 100);
rt_thread_mdelay(100);
}
}
else if (argc == 3)
{
if (!strcmp(argv[1], "probe"))
{
if (dev)
{
mpu6xxx_deinit(dev);
}
dev = mpu6xxx_init(argv[2], RT_NULL);
}
else if (dev == RT_NULL)
{
rt_kprintf("Please probe mpu6xxx first!
");
return ;
}
else if (!strcmp(argv[1], "sr"))
{
mpu6xxx_set_param(dev, MPU6XXX_SAMPLE_RATE, atoi(argv[2]));
}
else if (!strcmp(argv[1], "sleep"))
{
mpu6xxx_set_param(dev, MPU6XXX_SLEEP, atoi(argv[2]));
}
else if (!strcmp(argv[1], "gr"))
{
mpu6xxx_set_param(dev, MPU6XXX_GYRO_RANGE, atoi(argv[2]));
}
else if (!strcmp(argv[1], "ar"))
{
mpu6xxx_set_param(dev, MPU6XXX_ACCEL_RANGE, atoi(argv[2]));
}
else
{
rt_kprintf("Unknown command, please enter 'mpu6xxx' get help information!
");
}
}
else
{
rt_kprintf("Unknown command, please enter 'mpu6xxx' get help information!
");
}
}
#ifdef FINSH_USING_MSH
MSH_CMD_EXPORT(mpu6xxx, mpu6xxx sensor function);
#endif
mpu6050.c
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-07-11 Asus the first version
*/
#include "sensor_inven_mpu6xxx.h"
int rt_hw_mpu6xxx_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.dev_name = "i2c1";
cfg.intf.user_data = (void *)MPU6XXX_ADDR_DEFAULT;
cfg.irq_pin.pin = RT_PIN_NONE;
rt_hw_mpu6xxx_init("mpu", &cfg);
return 0;
}
INIT_APP_EXPORT(rt_hw_mpu6xxx_port);
3、在这些main.gen.文件夹下,主程序围绕“hal_entry();”函数(在src文件夹文件),默认不变
4. 下载验证
1、编译
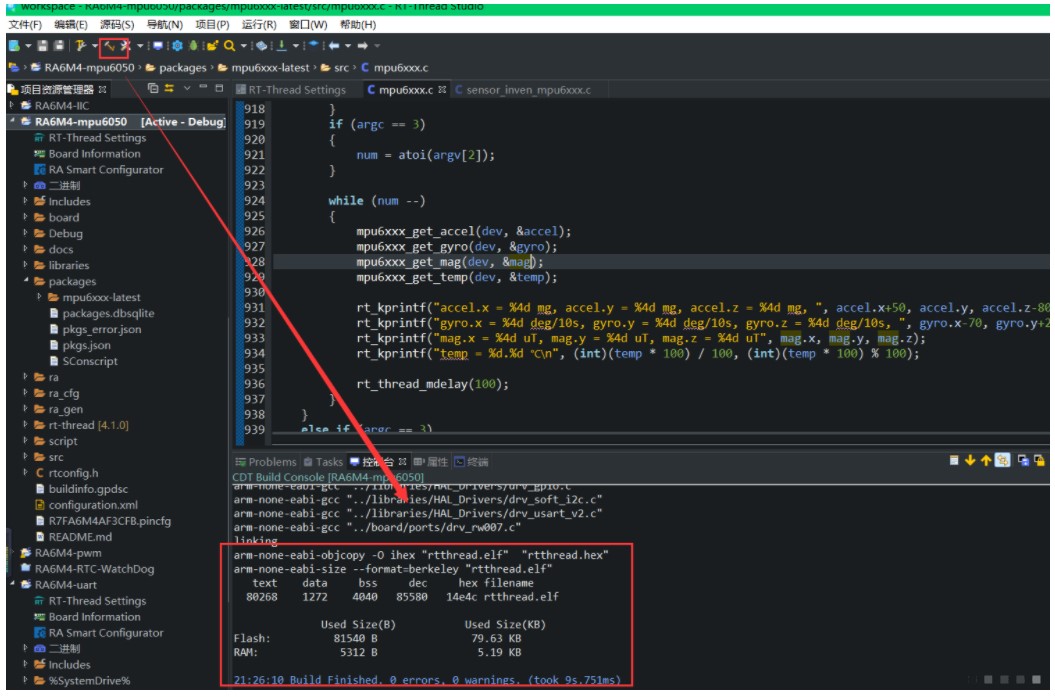
编译成功
2、下载程序

下载成功
3、CMD终端调试
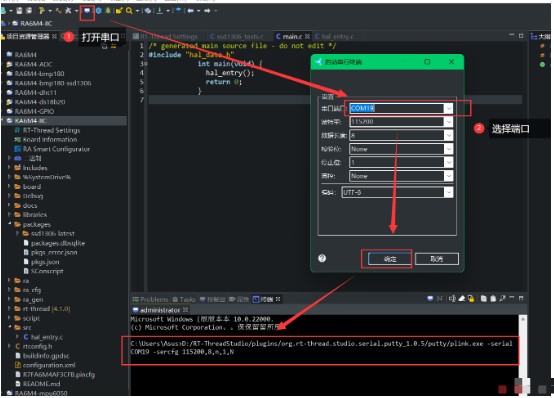
然后板载负载开始,串口打印显示输入
!mpu6xxx
mpu6xxx probe i2c1

晃动传感器,获取角速度,角速度和温度,变成mpu6xxx read 20
输入
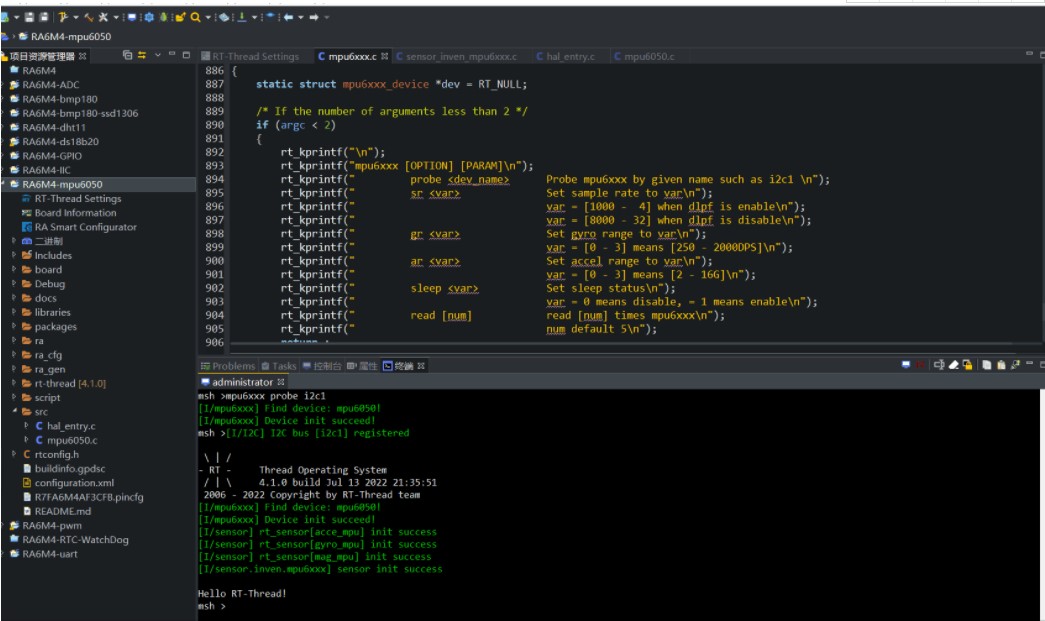
打印日志
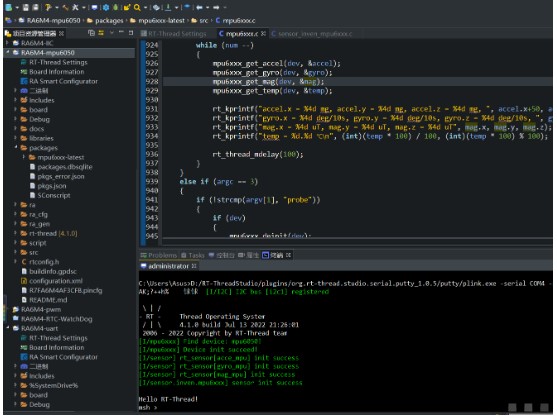
| /
- RT - Thread Operating System
/ | 4.1.0 build Jul 13 2022 21:35:51
2006 - 2022 Copyright by RT-Thread team
[I/mpu6xxx] Find device: mpu6050!
[I/mpu6xxx] Device init succeed!
[I/sensor] rt_sensor[acce_mpu] init success
[I/sensor] rt_sensor[gyro_mpu] init success
[I/sensor] rt_sensor[mag_mpu] init success
[I/sensor.inven.mpu6xxx] sensor init success
Hello RT-Thread!
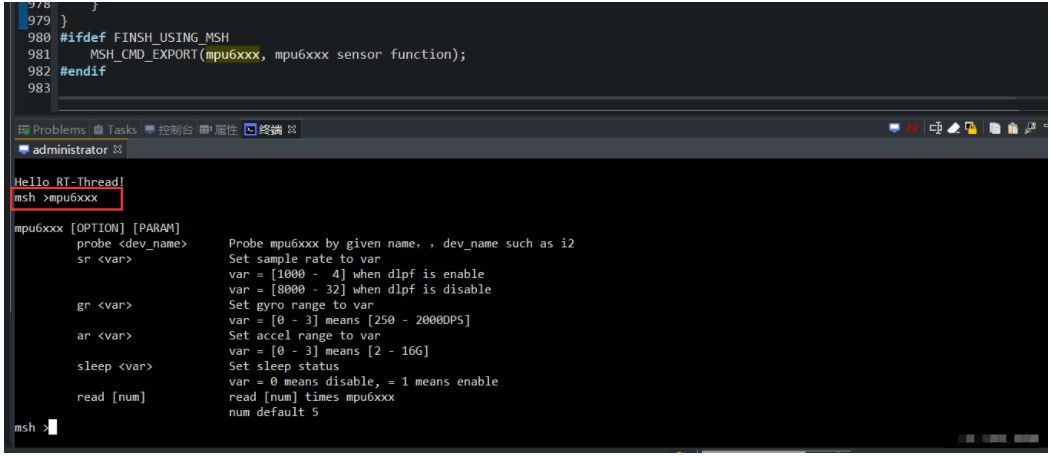
msh >mpu6xxx
mpu6xxx [OPTION] [PARAM]
probe Probe mpu6xxx by given name such as i2c1
sr Set sample rate to var
var = [1000 - 4] when dlpf is enable
var = [8000 - 32] when dlpf is disable
gr Set gyro range to var
var = [0 - 3] means [250 - 2000DPS]
ar Set accel range to var
var = [0 - 3] means [2 - 16G]
sleep Set sleep status
var = 0 means disable, = 1 means enable
read [num] read [num] times mpu6xxx
num default 5
msh >mpu6xxx probe i2c1
[I/mpu6xxx] Find device: mpu6050!
[I/mpu6xxx] Device init succeed!
msh >mpu6xxx read 20
accel.x = 200 mg, accel.y = -4 mg, accel.z = 3 mg, gyro.x = 0 deg/10s, gyro.y = -1 deg/10s, gyro.z = -2 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.65 ℃℃
accel.x = 203 mg, accel.y = -4 mg, accel.z = 19 mg, gyro.x = -1 deg/10s, gyro.y = -1 deg/10s, gyro.z = 0 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.65 ℃℃
accel.x = 194 mg, accel.y = -9 mg, accel.z = 6 mg, gyro.x = -1 deg/10s, gyro.y = 1 deg/10s, gyro.z = -2 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.60 ℃℃
accel.x = 210 mg, accel.y = 11 mg, accel.z = 15 mg, gyro.x = -6 deg/10s, gyro.y = 0 deg/10s, gyro.z = -1 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.60 ℃℃
accel.x = 389 mg, accel.y = 408 mg, accel.z = 499 mg, gyro.x = 25 deg/10s, gyro.y = -127 deg/10s, gyro.z = 353 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.65 ℃℃
accel.x = 187 mg, accel.y = -218 mg, accel.z = -70 mg, gyro.x = 37 deg/10s, gyro.y = -15 deg/10s, gyro.z = 478 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.74 ℃℃
accel.x = -149 mg, accel.y = -561 mg, accel.z = 246 mg, gyro.x = -2571 deg/10s, gyro.y = 479 deg/10s, gyro.z = 121 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.60 ℃℃
accel.x = 104 mg, accel.y = -109 mg, accel.z = -42 mg, gyro.x = -1431 deg/10s, gyro.y = -1333 deg/10s, gyro.z = -1885 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.70 ℃℃
accel.x = 677 mg, accel.y = -592 mg, accel.z = 330 mg, gyro.x = -313 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -1443 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.55 ℃℃
accel.x = 749 mg, accel.y = -57 mg, accel.z = -410 mg, gyro.x = -1377 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -611 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.65 ℃℃
accel.x = 512 mg, accel.y = -146 mg, accel.z = -1845 mg, gyro.x = -799 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -149 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.55 ℃℃
accel.x = -180 mg, accel.y = 420 mg, accel.z = -2800 mg, gyro.x = 519 deg/10s, gyro.y = 1497 deg/10s, gyro.z = 140 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.60 ℃℃
accel.x = 237 mg, accel.y = 243 mg, accel.z = -1148 mg, gyro.x = 1585 deg/10s, gyro.y = 2523 deg/10s, gyro.z = 1265 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.60 ℃℃
accel.x = 77 mg, accel.y = -667 mg, accel.z = -257 mg, gyro.x = 907 deg/10s, gyro.y = 2523 deg/10s, gyro.z = 1608 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.51 ℃℃
accel.x = -239 mg, accel.y = -726 mg, accel.z = 644 mg, gyro.x = 557 deg/10s, gyro.y = 2523 deg/10s, gyro.z = 651 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.51 ℃℃
accel.x = -230 mg, accel.y = -556 mg, accel.z = 181 mg, gyro.x = 215 deg/10s, gyro.y = 294 deg/10s, gyro.z = -54 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.65 ℃℃
accel.x = -385 mg, accel.y = -600 mg, accel.z = 570 mg, gyro.x = -1 deg/10s, gyro.y = -2045 deg/10s, gyro.z = -128 deg/10s, mag.x = 0 uT, mag.y =
0 uT, mag.z = 0 uTtemp = 31.55 ℃℃
accel.x = -335 mg, accel.y = -419 mg, accel.z = -310 mg, gyro.x = -1128 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -1016 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.55 ℃℃
accel.x = 534 mg, accel.y = 100 mg, accel.z = -1428 mg, gyro.x = -1368 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -1052 deg/10s, mag.x = 0 uT, mag.
y = 0 uT, mag.z = 0 uTtemp = 31.55 ℃℃
accel.x = 469 mg, accel.y = 265 mg, accel.z = -1841 mg, gyro.x = -1220 deg/10s, gyro.y = -2479 deg/10s, gyro.z = -656 deg/10s, mag.x = 0 uT, mag.y
= 0 uT, mag.z = 0 uTtemp = 31.46 ℃℃
原作者:Skype0902


