本文主要介绍如何使用 RT-Thread UART 对接 NimBLE 中 Host 端的 HCI 传输层,实现 RT-Thread NimBLE Host 与 BLE Controller 使用串口进行通信的场景。
RT-Thread UART 的使用
首先看一下官方文档-UART 设备 ,了解一下 RT-Thread 中 UART 设备的管理及使用。
主要是处理好串口初始化、串口发送部分、串口接收部分。
串口初始化
通过串口名称查找串口设备、控制串口设备(配置工作参数等)及 打开串口设备。
串口发送部分
使用 rt_device_write() 向已打开的串口设备中写入数据,串口则会发送出去。
串口接收部分
这一部分比较灵活,可以打开串口设备前,使用 rt_device_set_rx_indicate() 设置接收回调函数;也可以使用轮询方式,设置专用的线程进行串口数据接收处理。
对接思路
依据这篇分析文章 - 对 NimBLE HCI 层分析 ,在 rt-thread uart 框架下进行对接。这里刚好与 hci_uart.c 例程相反,主要是实现 Host 侧 HCI 层,主体框架如下:
需要用的统一的串口发送接口。
需要具体实现向使用串口向 ll 端发送 cmd 和 acl 包的接口:ble_transport_to_ll_cmd_impl 、ble_transport_to_ll_acl_impl。
如何接收从 ll 端传来的数据: 还是使用官方提供的 hci_h4_sm,接收串口数据,组帧后自动调用回调函数,并且分类后使用 ble_transport_to_hs_evt 和 ble_transport_to_hs_acl 传递给 Host。
统一的串口发送接口
使用 rt_device_write() 接口发送串口数据,并确保 buf 中所有数据都能够通过串口发送完毕。
// UART send data
static void rtthread_uart_tx(const uint8_t *buf, size_t len)
{
size_t remaining = len;
size_t tx_size = 0;
while (remaining > 0) {
tx_size = rt_device_write(g_serial, 0, buf, remaining);
buf += tx_size;
remaining -= tx_size;
}
}
HCI 包发送接口
由于当前为 Host 侧,则需要实现向 Controller 端发送的 cmd 及 acl 包的接口。
HCI 包
看一下 Bluetooth Spev Core 5.0 的官方文档中对 UART HCI 包的描述:
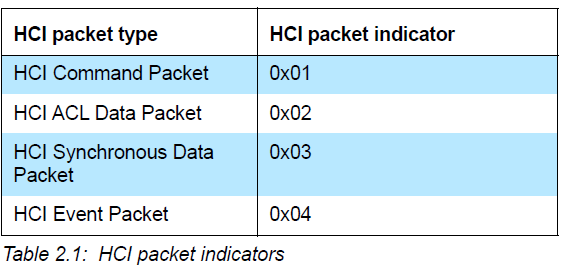
且文档中明确表示:HCI Command Packets 只能由 Host 发向 Controller;HCI Event Packets 只能由 Controller 发向 Host;而
HCI ACL/Synchronous Data Packets 可以双向发送。
紧接着就说了 HCI 包的发送形式:首先必须发送 HCI packet indicator, 其实也就是这里的 TYPE 标识;且 indicator 也可紧接着刚发送完的完整 HCI 包发送。
ble_transport_to_ll_cmd_impl 实现
Vol2 Part.E 5.4.1 小结介绍了 HCI command packet 的格式, HCI command packet 前3个字节为 HCI packet header:头两个2个字节为标识码,用来标识不同类型的包;后一个字节为参数总长度。接着后面的字节为所有的参数信息,不同的命令有不同的参数信息,这个不过多关注。
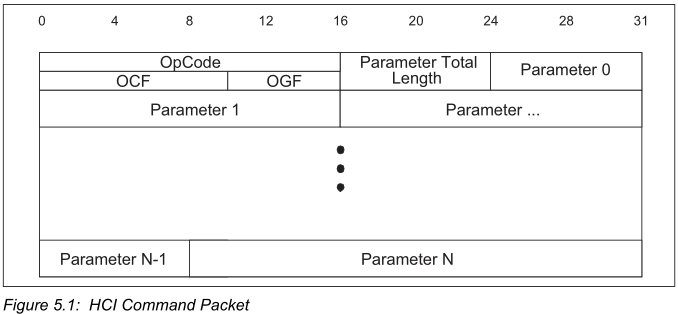
接口中 Host 提供包的 buffer 指针,据此主要获取 HCI Command Packet 中长度信息得知数据包总长度,先发送一字节 indicator HCI_H4_CMD,然后获取 buf 中 Parameter Total Length 字段得到需要发送 cmd packet 的总长度为 buf[2] + 3 (header)。
接着发送 Packet 所有内容即可。
int ble_transport_to_ll_cmd_impl(void *buf)
{
uint8_t indicator = HCI_H4_CMD;
uint8_t *cmd_pkt_data = (uint8_t *)buf;
size_t pkt_len = cmd_pkt_data[2] + 3; // parameter_len + header_len(3)
rtthread_uart_tx(&indicator, 1); // send indicator
rtthread_uart_tx(cmd_pkt_data, pkt_len); //send cmd pkt data
ble_transport_free(buf); //free hci pkt
return 0;
}
ble_transport_to_ll_acl_impl 实现
HCI ACL Data Packet,用于 Host 与 Controller 之间交换数据。HCI ACL 数据包头是数据包的前4个字节:前两个字节包含句柄以及标志位;后两个字节是数据字段的总长度。
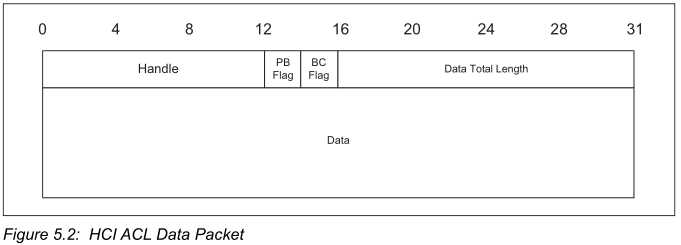
但此处接口中 Host 提供 os_mbuf 形式的数据 buffer ,因此有必要稍微了解一下 struct os_mbuf , 其声明在porting\nimble\include\os\os_mbuf.h 中,依据注释可以简单知道,这是一个链式内存 buffer 结构,结构体中除了保存当前 buffer 信息外,还有指向下一个 os_mbuf 的信息,就是一个单链表形式,说明这一个 acl packet 的 data 可能分散在几个 os_mbuf 结构中,以链表形式组织。
所以需要按照链表顺序从头往尾依次把所有 os_mbuf 中的数据发送出去。当然首先要发送 indicator: HCI_H4_ACL。
int ble_transport_to_ll_acl_impl(struct os_mbuf *om)
{
uint8_t indicator = HCI_H4_ACL;
rtthread_uart_tx(&indicator, 1); // send indicator
// single-list, send all node data
struct os_mbuf *x = om;
while (x != NULL)
{
rtthread_uart_tx(x->om_data, x->om_len);
x = SLIST_NEXT(x, om_next);
}
os_mbuf_free_chain(om); // free os_mbuf chain
return 0;
}
HCI 包接收处理
此处构建 UART 接收 HCI 包的机制,需要从 UART 接收 Controller 端传输来的 HCI 包,包括 evt 和 acl 包。
在之前的 HCI 层分析文档中提到,官方提供了 hci_h4.h 中的接口进行数据接收后的判断以及自动组包。
直接使用 hci_h4_sm_rx 接口接收 UART 中的数据。
注册 hci_uart_frame_cb 为包处理回调函数;分别处理 evt 和 acl 类型的包,并分别传递给 Host 。
接收 UART 数据
考虑到使用 hci_h4_sm 接收数据后,会自动调用相应回调函数,这样会导致接收回调函数调用太多且臃肿,所以这里不打算使用中断方式接收字符;而是单独开一个轮询线程,不断轮询串口设备接收到的信息,然后使用 hci_h4_sm_rx() 接收数据后进行处理。
/* hci_h4 rx instance */
struct hci_h4_sm g_hci_h4sm;
// uart rx thread
static void rtthread_uart_rx_entry(void *parameter)
{
uint8_t data[64];
size_t data_len;
while (1) {
data_len = rt_device_read(g_serial, 0, &data, 64);
if (data_len > 0) {
hci_h4_sm_rx(&g_hci_h4sm, data, data_len);
}
}
}
HCI 包处理回调函数
编写对应的回调函数,这里按照之前的 hci_uart.c 例程修改即可。只不过这里 HCI 包类型是 evt 和 acl,以及需要往 Host 发送。
static int hci_uart_frame_cb(uint8_t pkt_type, void *data)
{
switch (pkt_type) {
case HCI_H4_EVT:
return ble_transport_to_hs_evt(data);
case HCI_H4_ACL:
return ble_transport_to_hs_acl(data);
default:
assert(0);
break;
}
return -1;
}
接着使用以下初始化接口,注册回调函数即可。
void hci_h4_sm_init(struct hci_h4_sm *h4sm,
const struct hci_h4_allocators *allocs,
hci_h4_frame_cb *frame_cb)
总结
到这里依据分析文档,使用 rt-thread UART 对接 NimBLE 的 HCI 层就实现完毕了。此时 rt-thread 上跑 Host 端,因此要将 NimBLE 的 Controller 功能关闭,将不编译 Controller 相关代码。
原作者:Leno_yan
更多回帖

