最近在学习 RT-Thread 中的 NimBLE 软件包,使用 menuconfig 配置选中 NimBLE 软件包,设置各种选项后,成功通过编译并且运行起来。不过这仅仅只是按照文档说明运行了起来,鉴于后面可能会修改 menuconfig 中配置的结构,因此大概分析了一下 RT-Thread 编译构建的机制。
官方文档
关于 RT-Thread 构建与配置的机制,其实官方文档中已经有了一些描述,不过这些描述放在首页的 开发工具 标签下,不好被发现。

可以先看看官方文档,对 RT-Thread 构建与配置系统 进行大概的了解。
配置工具 - Kconfig
Kconfig 是一个管理配置的机制,源于Linux内核的配置构建系统,通过条件编译和宏来裁剪功能,将一些不必要的C语言代码在预处理阶段就屏蔽掉,减少需要编译的代码;当然也可以用来做选择。
主要包括 Kconfig 文件以及 UI 配置界面,menuconfig 就是一个 UI 配置界面。menuconfig 是依据 Kconfig 中的规则分析出构建选项目录显示给我们进行选择;也就是说如果想修改 menuconfig 中显示的内容,是可以通过修改 Kconfig 内容实现的,具体的语法还是看一下官方文档(Kconfig 语法示例)介绍。
当选择完成后,选择的配置会记录在 .config 文件中,修改选项后 save 或者 exit 都可看到写入 .config 文件的提示信息。
.config 中的保存的内容会同步到 rt_config.h 中自动生成一些宏(rt_config.h 就是整个 RT-Thread 的配置文件,在其中通过宏定义一些参数等等)。关于同步 .config 中信息到 rt_config.h 的过程,有兴趣的话可以分析一下 rt-thread/tools/menuconfig.py 脚本文件,里面是 menuconfig 的 python 代码,包括了显示 GUI 以及对 .config 和 rt_config.h 文件的操作。
实际过程分析:
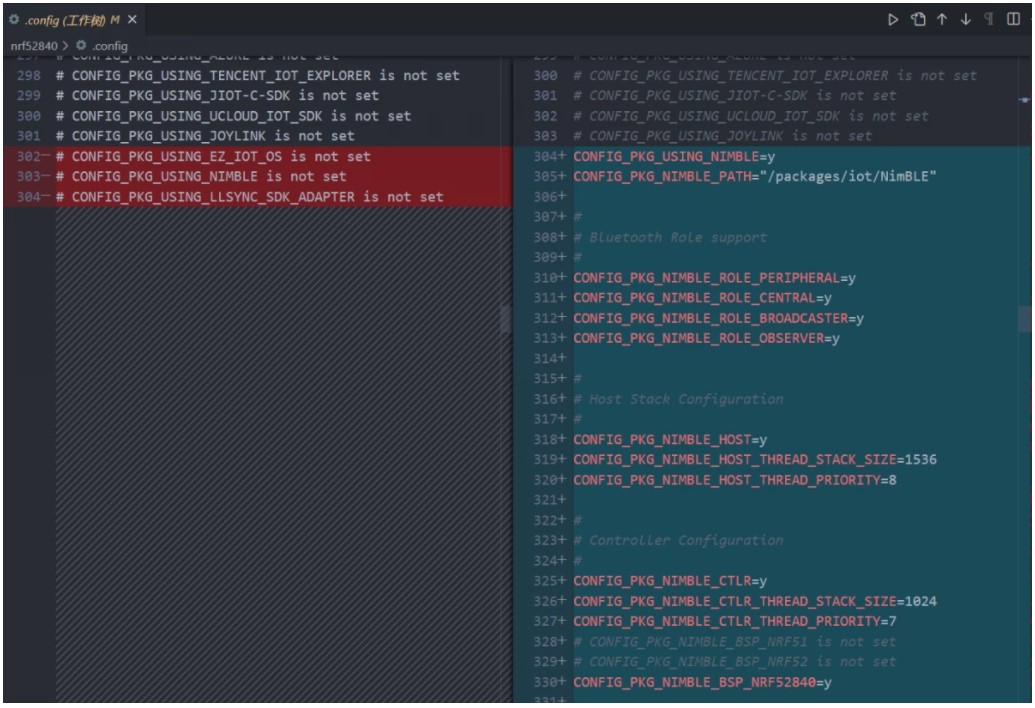
当在 menuconfig 中选中 RT-Thread online packages -> IoT - internet of things 下的 NimBLE 软件包后,保存退出。
.config 文件中增加了 NimBLE 相关的内容:
而在 rt-config.h 中也自动增加了 NimBLE 相关的宏定义。
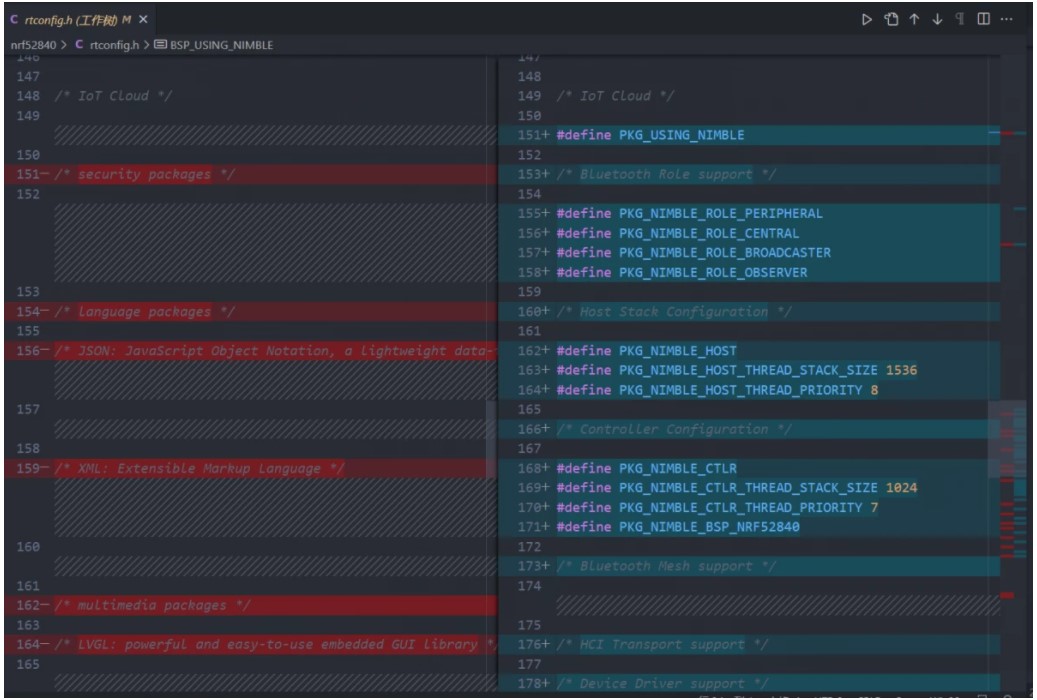
而这些宏会作用到 NimBLE 软件包中对应的地方,例如这其中的 PKG_NIMBLE_CTLR 宏是配置蓝牙 controller 功能的选项,当其没有被定义时,NimBLE 软件包中蓝牙 controller 部分功能则会被屏蔽失效。
还有一些宏可以用于定义运行参数,例如栈大小、线程优先级等,关于 RT-Thread 内核的一些参数也定义在 rt_config.h 中,在menuconfig 中对于内核的配置也会最终映射到此处。
关于配置相关就说到这,接着看一下实际构建项目的工具。
构建工具 - SCons
SCons官方介绍
RT-Thread 使用 Scons 为构建工具的唯一目的就是让开发者更容易开发功能,去除 Make 繁琐的语法过程。Scons 主要是由 python 语言构成,除了构建功能外也能完成 python 的一些功能,比较灵活。
Scons 的基本命令和函数等等都在官方文档里有介绍,这里也不再赘述。主要看一下分层构建,引用官方文档:
SCons 使用 SConscript 和 SConstruct 文件来组织源码结构并进行构建,SConstruct 是 scons 构建的主脚本;SConscript 存放在源代码的子目录下,通常放在项目的子目录,以达到分层构建的目的。
SConstruct 主要是关于编译环境,编译参数的一些配置描述;SConscript 则是组织对应子目录的编译情况,运行具体的构建语句可以结合官方文档或者自行百度分析。
关于构建时使用的交叉工具链的配置,可以在 bsp 目录下 rtconfig.py 文件中修改,里面也包含了一些常见的交叉编译工具链平台,如 gcc、keil、iar 等。可以为项目生成不同平台的项目开发配置文件,方便之后使用其他平台进行开发。
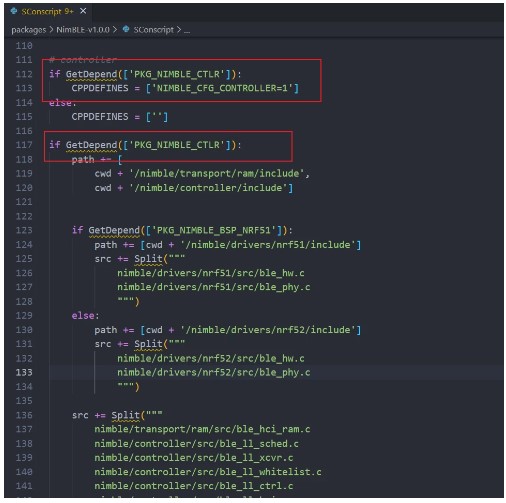
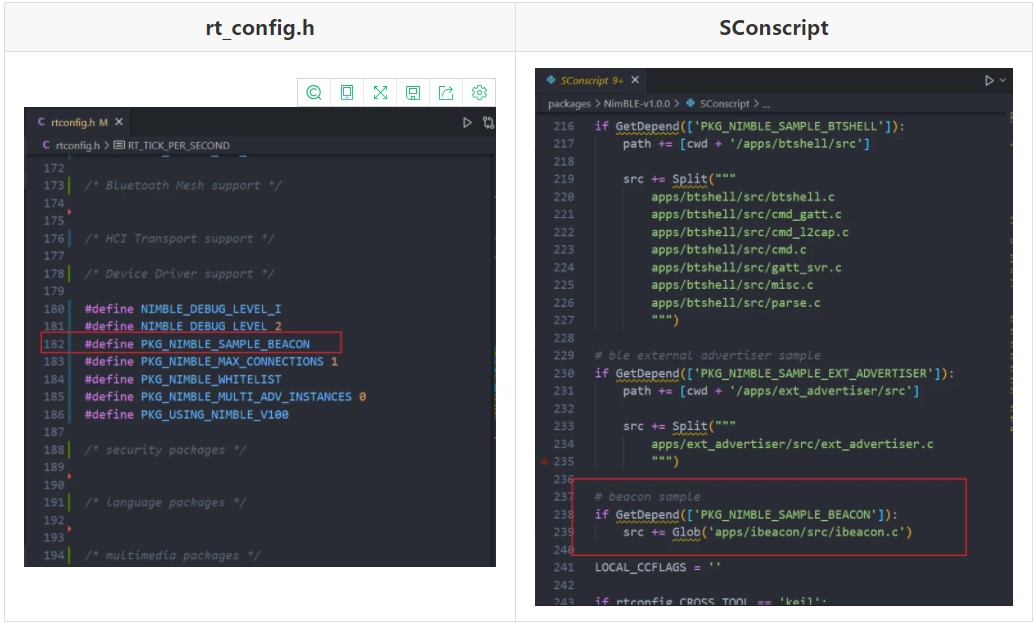
一个很直观的功能,就是依据代码中的 宏定义 来判断构建哪些源文件,主要使用 GetDepend() 函数获取宏定义状态。以 NimBLE 软件包为例子,在软件包目录中的 SConscript 中会涉及到上一章节说到配置相关宏定义:
可以看到,如果在 menuconfig 中开启了 蓝牙 Controller 功能,则 PKG_NIMBLE_CTLR 宏是会被定义在 rt_config.h 中的,那么在编译构建过程中,这里的 GetDepend() 是可以检测到相关宏定义的,也就会依据下面的代码将 Controller 相关源码文件加入编译。
软件包中 BLE 相关的例程也是通过这个方式进行选择编译的,在 menuconfig 中选中 beacon 例程,rt_config.h 中生成相关宏定义,编译时就只会将 beacon 例程相关源文件加入编译。
基于这些功能,SCons 搭配 Kconfig 实现项目的配置裁剪构建。初此之外,SCons 还有很多灵活性的功能,官方文档中都有提到。
一体化开发工具 - Env
Env 是 RT-Thread 推出的开发辅助工具,针对基于 RT-Thread 操作系统的项目工程,提供编译构建环境、图形化系统配置及软件包管理功能。
Env-用户手册
前面说的 menuconfig 以及 SCons 工具 RT-Thread 官方都给你打包好了,集成在 Env 环境中。这也是为什么每次都要打开 Env 环境进行配置构建。
每次使用一个 bsp 工程时,menuconfig 完成之后,还需要根据选项配置将特定的代码(如添加软件包等)通过 pkgs --update 命令进行拉取或者更新到本地。这也就涉及到 RT-Thread 提供的软件包管理功能,搭配 menuconfig 配置功能,软件包代码的下载、更新和删除 都可以使用 pkgs --update 命令。
有时还需要通过 pkgs --upgrade 命令,对env环境下软件包注册文件进行更新,保持软件包列表与官方服务器同步,以获取最新的软件包。
软件包的 Kconfig
值得一提的是,一般在 bsp 下 Kconfig 文件中看不到具体的配置内容,而是通过数个部分分散到不同目录的 Kconfig 文件中,bsp 下 Kconfig 文件一般都是如下编写:
mainmenu "RT-Thread Configuration"
config BSP_DIR
string
option env="BSP_ROOT"
default "."
config RTT_DIR
string
option env="RTT_ROOT"
default "../../.."
config PKGS_DIR
string
option env="PKGS_ROOT"
default "packages"
...
source "$RTT_DIR/Kconfig"
source "$PKGS_DIR/Kconfig" 从上面可以看出主要是定义了 3 个路径:
BSP 当前路径
rt-thread 的根路径。
packages 的路径,是指 env 工具目录下的 packages 目录。
以及使用 source 读取 2 个路径下的 Kconfig 文件,主要是看 $RTT_DIR/Kconfig 和$PKGS_DIR/Kconfig:
前者是 rt-thread 源码根路径下的 Kconfig 用于与其他组件的 Kconfig 关联起来。
后者不是指的 bsp 目录下的 packages 目录,而是 env 环境下的 packages 目录,这里不要弄混了;bsp 下的 packages 目录只是选中软件包后拉取下来的软件包源码,在里面是没有 Kconfig 文件的。而 env 工具目录下也有一个 packages 目录,里面就有 这里指的 $PKGS_DIR/Kconfig 文件,用于软件包配置使用,也作用于拉下来的 软件包源码配置与构建。
总结
最后总结一下,当运行一个 bsp 时,基本的流程都如下:
在 bsp 路径下打开 Env 工具。
配置工程 :使用menuconfig 将一些组件进行图形化的选择,对整体工程进行添加或者裁剪。(作用于 .config 文件,自动映射到 rt_config.h 文件,定义相关宏,完成配置)
软件包代码的更新 :如果使用到了软件包,则需要 pkgs --update ,主要是依据 menuconfig 配置结果,更新相关软件包代码。
构建工程:使用 SCons 进行项目的构建, 实际构建动作基于 SConscript 和 SConstruct 文件中的规则,也与 rt_config.h 文件相关(编译裁剪的落地)。
上述过程就构成一次 RT-Thread 配置构建的过程,最终生成的二进制文件可以烧录到目标板上运行。
可以看出后续的软件包更新以及项目构建过程,都依赖于开发者在 menuconfig 中的配置,通过 .config 和 rt_config.h 文件进行配置的传递。
原作者:Leno_yan