嵌入式技术论坛
登录
直播中
CDCNKA
8年用户
1231经验值
擅长:385288
私信
关注
[经验]
如何在RT-Thread的qemu环境里接入Bluetooth Controller
RT-Thread
BlueTooth
蓝牙协议栈
最近在基于 RT-Thread 环境开发 BLE,觉得每次都需要烧录代码到
开发板
太麻烦了,想利用 RT-Thread 的 qemu 环境开发 BLE 应用,于是我想起了之前使用 Zephyr 时,它提供的 qemu 环境能够直接访问物理机上的 Bluetooth Controller,也就是说,qemu 环境里运行 Bluetooth Host,能够直接发送 HCI 命令给 Controller,从而达到在 qemu 环境里运行 BLE 应用的目的。
并且这种 qemu Host + 物理机 Controller 的模式,能够直接使用物理机自带的蓝牙控制器,也可以接入外部的蓝牙卡片充当控制器,十分灵活。
环境安装
这里的环境安装主要是编译 bluez 的源码,因为实现该功能需要 bluez 提供的工具 btattach,btproxy,btmon,一般系统自带的 bluez 并未编译这些工具,所以最好自己编译 bluez 的源码。如何编译 bluez 的源码,可以参考我之前的文章 Zephyr - Bluetooth 环境搭建 - QEMU 篇。
btproxy 配置
首先需要确定物理机内拥有 Bluetooth Controller,如何利用外接的蓝牙卡片充当 Controller 在以后的文章里介绍,在命令行输入 hciconfig ,一般会有下述信息显示:
这就代表系统内有了 hci0 这个设备。
之后关闭 Controller,再利用 btproxy 工具创建一个 Bluetooth Controller 的代理(proxy),命令如下:
tangjia@FA001334:~/bluez$ sudo systemctl stop bluetooth
tangjia@FA001334:~/bluez$ sudo tools/btproxy -u -i 0
其中 -u 代表使用 Unix Server,默认路径为 /tmp/bt-server-bredr,-i 0 代表使用 hci0 设备。上述命令执行完后应该会有下述显示:
说明 btproxy 把 hci0 设备和 /tmp/bt-server-bredr 设备之间建立了联系,其他程序可以通过 /tmp/bt-server-bredr 这个设备访问 hci0 设备,从而访问 Bluetooth Controller 。
qemu 配置
目前在 R 的 qemu-vexpress-a9 环境里,运行 qemu 程序的命令为:
qemu-system-arm -M vexpress-a9 -kernel rtthread.bin -serial stdio -sd sd.bin
只需要更改执行命令为:
qemu-system-arm -M vexpress-a9 -kernel rtthread.bin -sd sd.bin -serial mon:stdio -serial unix:/tmp/bt-server-bredr
即可成功在 qemu 环境里与 Bluetooth Controller 交互,下面稍微介绍下原理和注意事项。
新增加的 qemu 命令参数为 -serial mon:stdio -serial unix:/tmp/bt-server-bredr,-serial 参数的介绍为:
-serial dev redirect the serial port to char device ‘dev’
这个参数将 qemu 程序的串口重定向到物理机的设备文件,
第一个-serial mon:stdio 将 qemu 里的 uart0 重定向到了物理机的 stdio 设备文件,而且在 qemu 程序里 uart0 用作 msh 命令行工具,类似 stdio,因此我们可以在物理机上看到 qemu 程序的打印数据,也可以输入命令。
第二个 -serial unix:/tmp/bt-server-bredr 是将 qemu 里的 uart1 重定向到物理机的 /tmp/bt-server-bredr 文件,而这个文件又是 hci0 设备的代理,因此从 qemu 程序的角度来看,就是使用 H4 协议,通过 uart1 去访问 Bluetooth Controller。uart1 的波特率使用 115200 即可(未找到说明,但一般都是这样使用)。
注意:上述两个 -serial 的顺序不能颠倒,否则 qemu 程序无法正常运行。
测试
我使用了目前正在开发的 hm 组件来测试环境是否搭建正常,hm 是 HCI-Middleware 的简称,是我在开源软件供应链点亮计划 - 暑期2021活动中开发的项目,它的用途是一个 HCI Transport 的通用组件,方便不同的蓝牙卡片对接,能够灵活地对接到不同的开源蓝牙协议栈,由于正在开发,只能简单地测试一下 qemu 环境能否使用蓝牙 Controller 。
输入命令运行程序:
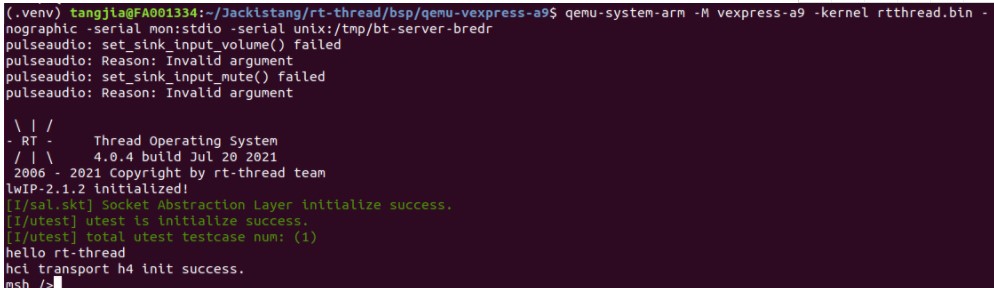
qemu-system-arm -M vexpress-a9 -kernel rtthread.bin -nographic -serial mon:stdio -serial unix:/tmp/bt-server-bredr
可以看见 RT-Thread 环境已经启动了,
并且 btproxy 界面里也显示有 client 连接了这个代理。
运行单元测试,测试成功,
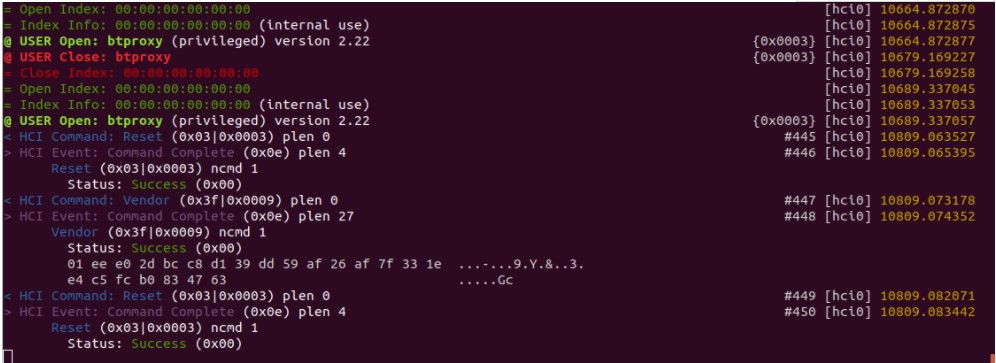
并且在 btmon 监控 HCI 命令的界面,
可以看见发送了三条测试 HCI 命令,并且 Controller 返回了相应数据,因此 qemu 环境成功访问物理机的 Bluetooth Controller 。
原作者:
Jacksi
更多回帖
rotate(-90deg);
回复
相关帖子
RT-Thread
BlueTooth
蓝牙协议栈
使用
RT-Thread
Master+
QEMU
模拟器进行
RT-Thread
原型快速开发
2807
如
何在
windows和linux平台使用
RT-Thread
QEMU
BSP,并运行
RT
-ThreadGUI示例
13624
RT-Thread
BSP
qemu
-virt64-riscv的编译
环境
搭建步骤
1674
RT-Thread
大会:组件使用和设备
接入
758
在Windows平台使用
QEMU
运行
RT-Thread
动态模块
6535
RT-Thread
qemu
mps2-an385 bsp移植制作 :
环境
搭建篇
592
RT-Thread
文档_
RT-Thread
SMP 介绍与移植
9
RT-Thread
文档_
RT-Thread
简介
5
RT-Thread
学习笔记 --(1)
RT-Thread
开发
环境
搭建
0
RT-Thread
:
RT-Thread
Nano添加shell
6
发帖
登录/注册
20万+
工程师都在用,
免费
PCB检查工具
无需安装、支持浏览器和手机在线查看、实时共享
查看
点击登录
登录更多精彩功能!
首页
论坛版块
小组
免费开发板试用
ebook
直播
搜索
登录
×
20
完善资料,
赚取积分