can总线在工业应用上使用频率非常高,特别是机器人和电机控制领域,看前面的评测文章并没有对can进行测试,刚好手里有块某宝买的nuc980dk61yc板子和can收发器芯片,简单搭个
电路测试下。
1.配置can管脚,使用CAN3,引脚PE10和PE12,在board/nu_pin_init.c中修改can管脚初始化函数
sta
tic void nu_pin_can_init(void)
{
/CAN3 PE10:RX PE12:TX/
outpw(REG_SYS_GPE_MFPH, (inpw(REG_SYS_GPE_MFPH) & ~0xF0F00) | 0x20200);
}
2.使能can配置
RT-Thread Components —->
Device Drivers —->
-- Using CAN device drivers
[] Enable CAN hardware filter
Hardware Drivers Config —->
On-chip Peripheral Drivers —->
[] Enable Controller Area Network(CAN) —->
[] Enable CAN3
3.官方已经把can驱动做好了,所以只要编译运行就能看到can3设备
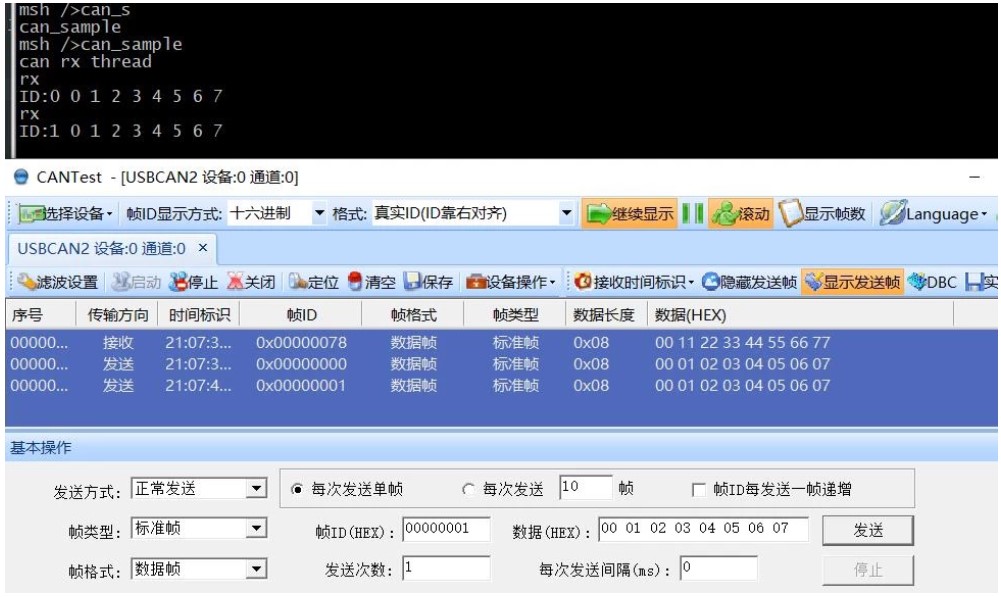
4.添加can测试代码,连接usb转can设备与can收发器进行测试cantest.c
原作者:老鸟kkk

 举报
举报


