虚拟化技术简介
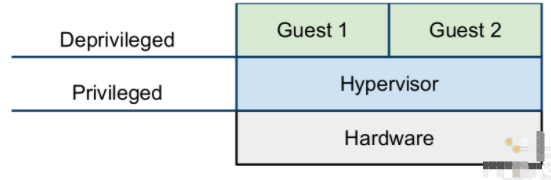
虚拟化是一个概念,单从这个概念的角度来看,只要是用某一种物品去模拟另一种物品都可以称为虚拟化,甚至于有些饭店用豆腐做出肉的味道,我认为这也可以称为一种虚拟化。但是这里我们主要讨论的是计算机领域的虚拟化,我们这样定义虚拟化“虚拟化是将单一物理设备模拟为相互隔离的多个虚拟设备,同时保证这些虚拟设备的高效性”。这个概念的定义里还包含了对虚拟化的要求,也就是这里的隔离性(isolated)和有效性(efficient)。我们常说的hypervisor,有些书也把它称为VMM(virtual machine monitor)则是一个直接运行在物理硬件上的软件,它的功能就是管理物理硬件,以便在不同的虚拟机之间共享这些物理资源(cpu,内存,外设等等),既然hypervisor直接给物理外设打交道,那它当然需要运行在特权模式了,在过去没有virtualization extesion的情况下,guest os和guest application只能都运行在de-privileged模式,如下图所示。
Popek和Goldberg有一篇虚拟化的经典论文,把需要在特权模式下执行的指令分成了两类:
sensitive instructions(敏感指令):这些指令试图去更改系统资源的配置信息,或者它的执行结果依赖于系统的状态。
privileged instructions(特权指令):这些指令在非特权模式下会trap(产生异常,陷入中断向量表),在特权模式下可以正常执行。
Popek和Goldberg提出构建hypervisor的要求:敏感指令是特权指令的子集。这种标准现在被称为classically virtualized(经典可虚拟化模型),虽然在不满足这个要求的情况下也可以做虚拟化(二进制翻译技术,后面会介绍),但是如果满足这个要求,实现起来会容易很多。下面介绍现有的虚拟化技术:
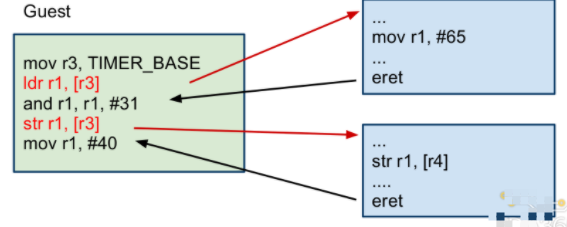
Pure virtualization(完全虚拟化):完全虚拟化要求硬件架构是可虚拟化的(符合经典可虚拟化模型),当trap进入hypervisor后,由hypervisor去模拟敏感指令的执行,这项技术也被称为trap-and-emulate。当一个guest os想要去访问特权资源(物理外设),就会产生一个trap唤醒hypervisor,hypervisor去模拟这个访问,然后返回到guest os的下一条指令去继续执行。如下图所示,红色箭头表示一个trap。可以看出,每一条特权指令都需要很多条指令去仿真,所以这种trap-and-emulate开销非常大,对系统性能有很大影响。
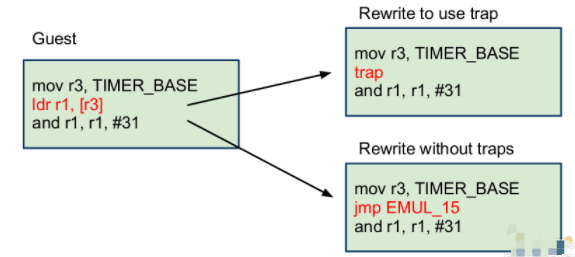
Binary rewriting(二进制重写):二进制重写就是当硬件架构不可虚拟化(不符合经典可虚拟化模型)采用的方法。它可以分为静态的和动态的,静态的二进制重写是通过扫描ELF文件,把所有的敏感指令替换成一个trap指令(系统调用指令),或者用一些非敏感指令去仿真执行这条敏感指令,动态的二进制重写对敏感指令的处理和静态的类似,只不过它是在运行时去逐条分析指令,其实这种方法更不好,因为不管是不是敏感指令,都需要逐条分析才能确定,非常耗时,静态方法在运行时的性能要好过动态方法,但是经常出现一些莫名其妙的错误,因为运行时状态非常复杂,静态修改很难预料到所有情况。上述过程如下图所示。
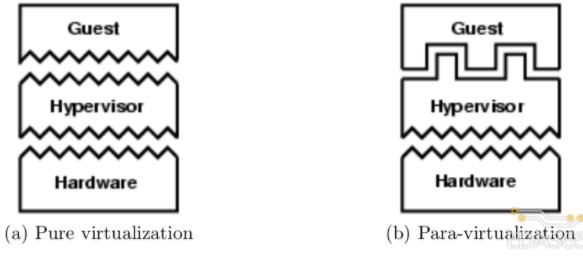
para-virtualization(类虚拟化):这种虚拟化方法,很多书都把它译为半虚拟化,其实这种译法是不准确的,半虚拟化(partial-virtualization)是一个早已存在的技术,它只虚拟化部分外设来满足某些专门的软件的执行环境,但是不能运行所有可能运行在物理机上的软件。如果读者对此有疑问,请参阅《系统虚拟化:原理与实现》,intel开源技术中心和复旦大学并行处理研究所著,书中1.3节对此有讨论。其实想解释清楚这部分内容是很难的,还要理解各种各样的虚拟化漏洞。简单来说,类虚拟化通过修改guest os的源码(API级),使得guest os避免这些难以虚拟化的指令(虚拟化漏洞)。操作系统通常会使用到处理器提供的全部功能,例如特权级别、地址空间和控制寄存器等。类虚拟化首先要解决的问题就是如何陷入VMM。典型的做法是修改guest os的相关代码,让os主动让出特权级别,而运行在次一级特权上。这样,当guest os试图去执行特权指令时,保护异常被触发,从而提供截获点供VMM来模拟(也可以采用hypercall的方式,下面介绍)。既然内核代码已经需要修改,类虚拟化还可以进一步优化I/O。也就是说,类虚拟化不是去模拟真实世界中的设备,因为太多的寄存器模拟会降低性能。相反,类虚拟化可以自定义出高度优化的I/O协议,这种I/O协议完全基于事物,可以达到近乎物理机的速度。
其实OKL4用的类虚拟化就是修改hypervisor提供给guest os的API(不同于底层硬件),同时修改guest os的源码,把那些敏感指令换成hypercall(calls into hypervisor)。下图展示的是,对于pure virtualization,硬件和hypervisor的API是相同的,但是对于para-virtualization是不同的。
虚拟化技术的比较Pure virtualization and binary rewriting
pure virtualization和binary rewriting都是不修改机器的API的,所以任何guest os都可以直接运行在虚拟化环境。但是,由于所有的特权指令都会导致trap,所以在虚拟环境下特权指令的执行开销要远远高于在native环境下。以前,x86和ARM都不符合classically virtualized时,VMWare采用binary rewriting在x86架构上实现虚拟化,经过优化后的性能开销小于10%,但是这项技术十分复杂。由于实现起来的复杂,就会增加运行在特权模式下的代码,这会增加attack suRFace和hypervisor出现bug的几率,所以会降低整个系统的安全性和隔离性。
Para-virtualization
Para-virtualization虽然是一个新词,在2002年中的Denali virtual machine monitor被提出来。但是这种设计理念早在1970的IBM的CMS系统就出现了,当时使用DIAG指令调用到hypervisor里去,并且一直到现在还有很多研究机构在使用这种理念,如Mach,Xen和L4。
Para-virtualization相比于pure virtualization可以提供更好的性能,因为它直接使用各种API而不是通过trap->decode->hardware emulation的过程来实现仿真。当然,它的缺点我也在之前的博客中提到过,那就是必须修改源码,让guest os使用新的API,这不仅是一项繁重的任务,同时对于一些非开源的操作系统,我们必须采用其他方法,除非这些非开源操作系统的厂商愿意与我们合作。
Virtual memory in virtualization environment
为什么要把内存管理部分单独拿出来讨论一下呢?因为这部分很复杂,其实之前我们讨论的内容主要都是cpu运行的问题,比如各种指令和各种模式之间的切换。关于内存,我们先讨论没有引入guest os时的虚拟内存管理,然后再讨论引入guest os之后的变化。
虚拟内存管理涉及的内容很多,这里不讨论各种内存分配算法,如何降低缺页率等等,只分析虚拟地址如何转换成物理地址。我们知道,ARM架构是通过MMU+TLB来完成从VA(virtual address,虚拟地址)到PA(physical address,物理地址)的转换,对于页表的访问实际上是由硬件自动完成的(如果不缺页的话)。但是加入了虚拟化之后,这个转换就复杂了,guest page table不完成从va到pa的转换,只是负责从guest va到guest pa的转换,而由hypervisor完成由guest pa到实际物理地址的转换,这个转换过程如下图所示。
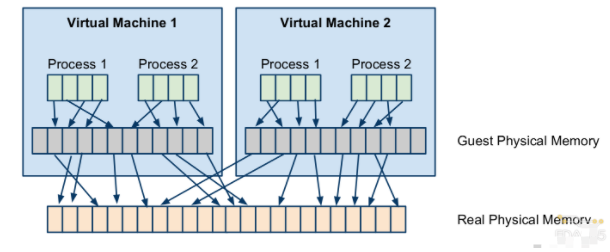
这个图表现的很清晰,但是想实现是非常难的,因为只有一个页表基址寄存器,所以硬件无法识别是从guest va到guest pa的转换还是va到pa的转换,在没有硬件支持的情况下,只能通过影子页表才能实现,影子页表的原理也是把两步转换(guest va->guest pa->pa)转换为一步,中间的同步用hash来做。影子页表在构建的时候,每次对guest page table的访问都需要trap,由hypervisor把guest pa转换成实际物理地址。如果读者想了解这一块内容,我建议深入学习一下KVM以前关于影子页表的实现(由于x86的硬件支持,目前KVM已经放弃影子页表),这里我们没办法深入探讨影子页表,但了解它大致是怎么一回事儿之后,我们可以分析以下它的性能。首先,它的性能一定非常不好,因为每次对guest page table的访问都需要trap,而且每次guest page table的修改还需要同步到影子页表上面,虽然用hash的方式能提速,但是相比于native环境性能差距比较大(NOVA做过一个实验,光访问页表的性能损失大约是23%),而且实现起来非常复杂。Intel和ARM对这一部分都提供了硬件支持,由硬件来完成这里提到的两级页表转换。其实根据程序运行时的局部性原理,如果每次访问都能TLB hit的话,这种二级页表转换和一级页表转换差别不大,但是当TLB miss的时候,需要访问two stage的页表访问的性能还是差别比较大的,尽管这部分由硬件来做。举个例子,比如KVM在Linux-64位的情况下,是4级页表转换,从va到pa需要访问5次页表,那么引入two stage之后,就需要5*5=25次访问页表,读者可以思考一下这里为什么是相乘的关系。
ARM介绍
我们首先介绍ARM架构里的各个部分,介绍它们的目的是为了理解当arm引入virtualization extension之后对它们的影响。
ARM总体介绍
arm是一种精简指令集(reduced instruction set computer,RISC)架构,精简(reduced)的意思是每条汇编指令独自完成所有的工作,而与之相对的复杂指令集则不是,它的一条汇编指令可能会翻译成好几条机器指令。大部分精简指令集的指令都在单个时钟周期内完成,它采用一种读取和存储分开的架构(load-store architecture),数据处理指令和I/O指令是分开的,数据处理指令是操作一个寄存器的值,和复杂指令集不同,关于复杂指令集的对应操作读者请自行查阅资料。现在arm已经推出v8架构,关于v8架构我还不太熟,所以这里以v7作为介绍(后续有时间我会研究下v8,在这里进行补充)。v7架构包含16个32bit的通用寄存器,还有一些寄存器是和特定的处理器模式相关的,还有各种协处理器的寄存器,这些寄存器将会在后面展开叙述。
ARM协处理器介绍
ARM协处理器是ARM架构的重要扩展,ARM架构允许最多16个协处理器,其中cp15被保留完成各种控制。cp15作用非常强大,它控制整个系统配置,cache和TLB的管理,MMU的控制和系统性能监控,我们这里主要讨论cp15的内存管理功能。
当cpu想要访问一个虚拟地址的时候,它首先去TLB里面查这个虚拟地址和ASID,都匹配的话就可以直接返回物理地址,cpu通过物理地址去访问物理内存就行了。如果TLB miss,MMU就会去访问页表,然后找到这个虚拟地址对应的物理地址,把这个虚拟地址、当前进程的PID、物理地址加入到TLB中去,然后返回物理地址给cpu去访问内存。这里面涉及的很多细节这里不讨论了,建议读者去参看ARM官方介绍。
处理器模式和TrustZone
ARM v7包含8种处理器模式(在v8已经变成4种exception level了,从EL0到El3),其中包含1种非特权模式和7种特权模式:
特权模式:FIQ、IRQ、supervisor、monitor、abort、undefined、system;
非特权模式:user。
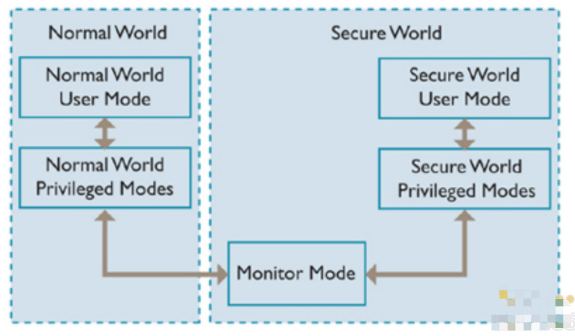
显然,除了应用程序运行在user模式以外,其他全部运行在特权模式。ARM的virtualization extension需要处理器支持TrustZone extension,我们来看一下TrustZone是什么。TrustZone将处理器的执行状态分为两个世界:
secure world:用于运行可信软件;
non-secure world:用于运行不可信软件。
这里的两个世界和处理器模式是重叠的,软件可以在任何模式、任何世界上运行。那么secure world和non-secure world的区别在哪呢?这里的secure又从何而来?是这样的,secure world有自己独有的内存和外设,这部分内容只有运行在secure world的软件可以访问,运行在non-secure world的软件是不可以访问的。这里引入了一个新的处理器模式,monitor mode,它运行在secure world,被用于做双系统(secure and non-secure world)之间的切换,如下图所示。
我们可以基于TrustZone去做虚拟化,因为它能够隔离内存、中断并且确保non-secure world的特权软件也不可能访问或者修改运行在secure world的软件的配置信息。然后这样做的缺陷是,在non-secure world只能运行一个guest os,在secure world运行一个hypervisor。Green Hill的INTEGRITY就是这样做的,感兴趣的读者可以去Google一下。
中断控制器
GIC(generic interrupt controller)是ARM里的中断控制器,现在也已经支持virtualization extension。GIC可以分为两部分:
Distributor(分发器):分发器负责接收中断,设置这个中断是否enable和它的优先级,之后把它送到对应的cpu interface上去。
CPU interface(中断接口):这部分负责屏蔽低优先级中断(相对于正在处理的中断的优先级),让高优先级的中断抢占cpu。
当外设产生中断的时候,这个中断首先发送给Distributor,Distributor将这个中断发送给对应的cpu interface。当cpu interface接受到这个中断的时候,它会检查这个中断是否enable,如果enable再去比较这个中断的优先级和当前正在处理的中断的优先级,进而决定处理器是否立即处理这个中断。
Virtualization Issues with the ARM Architecture
标准的ARM架构是不符合可虚拟化模型的,有很多敏感指令在非特权模式下执行却不会产生trap。比如CPS指令,这条指令的作用是改变处理器状态,当这条指令在用户态执行时不会产生trap,甚至没有任何效果,可以认为是简单的跳过。即使所有的敏感指令都会产生trap,在ARM架构上用上述的trap-and-emulate技术也是很困难的,因为ARM的敏感指令非常多,只要和特权资源交互的指令都是敏感指令,比如虚拟内存子系统,中断控制子系统和协处理器,用上述方式的话开销太大,对系统性能有很大冲击。比如,arm-v7架构不支持页表访问的虚拟化,那么就需要影子页表,每次访问guest pa都需要trap,同样地,中断控制器也需要被仿真,当中断很频繁的时候(timer tick),这种仿真的开销也是非常大的,为了克服这种种弊端,ARM推出了virtualization extension。
ARM对虚拟化的硬件支持
在讨论arm新增加的virtualization extension之前,我们知道对硬件虚拟化的支持主要有intel的VT-x和AMD的AMD-V,它们两个十分类似,所以这里我们只介绍VT-x,看看它对虚拟化做了怎样的支持(为后面做对比)。
将cpu的模式分为hypervisor(VMX root operation)和guest(VMX non-root operation)。
可以配置一些敏感指令和事件,让它们产生或者不产生trap。
(新增)提供扩展页表(EPT,extended page table),通过这个页表在硬件上完成second-stage of translation,其实就是常说的二级页表翻译。
(新增)在TLB上新增加了VM tag去标识每一个虚拟机,这样可以避免每次VM-entry和VM-exit时的TLB flush操作(其实还增加了VPID,去标识VM里虚拟进程的进程id)。
(新增)在Intel的 VT-d里增加了对DMA操作的支持,而且是一种安全的DMA(具体怎么实现的安全读者可以自己分析下)。
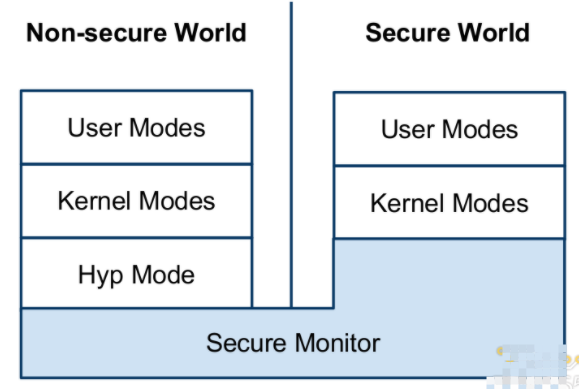
接下来我们看看ARM对虚拟化的支持,这里讨论的虚拟化支持主要是针对v7架构,并且需要实现上文提到的TrustZone。利用硬件扩展实现pure virtualization的总体架构如下图所示:
hypervisor运行在non-secure world里的hyp mode,这个hyp mode使hypervisor可以管理non-secure world里其他所有的模式(user mode和kernel mode)里运行的软件。
guest os运行在non-secure world的特权模式(kernel mode),guest application运行在non-secure world的user mode。
上述内容是对虚拟化扩展的一个总体介绍,具体来说,ARM新增了以下几个feature:
hyp mode:hyp mode是运行在non-secure world的最高特权级模式,如上图所示。它负责管理guest os,hypervisor运行在这个新的模式里。这个模式将hypervisor和运行中的guest os分开,guest os运行在non-secure的kernel mode。
Second-stage of translation:由hypervisor负责把所有的gust pa转换成实际物理地址,其实就是从物理上支持两级页表转换,而不需要使用影子页表。
中断控制:这部分后面展开叙述。
仿真支持:当trap进hypervisor时,硬件向hypervisor提供一些额外的信息,消除了hypervisor取指令然后decode的开销。因为对外设的模拟需要采用trap-and-emulate技术,削减这项技术的开销可以有效的提升性能。
trap配置:不是所有的敏感指令或特权操作都需要trap进hypervisor进行处理,我们可以配置指令或操作是否trap,这样可以减少不必要的trap,从而减少开销,提升性能。
读者可以自行对比Intel和ARM对虚拟化支持的相同点和不同点,分析他们为什么这样做。接下来展开叙述上文提到的中断控制部分。
中断控制
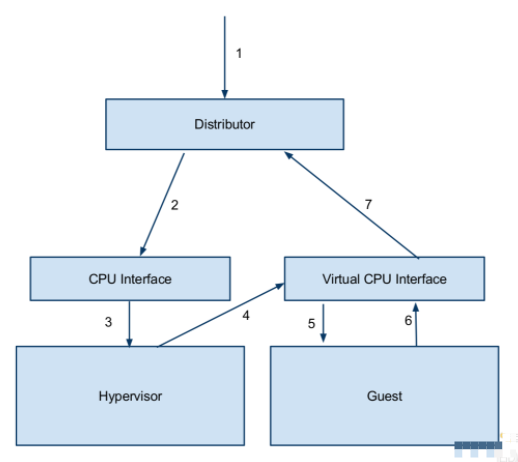
ARM创建了一个新的硬件模块,virtual CPU interface,类比我们前面在介绍GIC时提到过的CPU interface,这个硬件模块可以直接被map到guest os里,从而避免使用trap-and-emulate去仿真CPU interface,guest os可以直接操作这个virtual CPU interface,例如开、关中断。当然关于GIC的另一个部分,Distributor,我们仍然需要通过trap-and-emulate去仿真,但是它对性能的影响不大,因为它只是在初始化的时候负责enable中断,之后就不再修改了。
当中断到来时,所有的中断都首先被送到hypervisor里进行处理,由hypervisor通过virtual CPU interface发送给当前正在执行的guest os。虚拟中断可以和物理中断进行映射,这样guest os就可以直接操作物理中断而不需要通过hypervisor了。下图所示是一个中断处理流程:
外设产生一个中断发送到Distributor
Distributor把这个中断发送给CPU interface
CPU interface告诉hypervisor去处理这个中断
hypervisor对这个中断进行检查,发现这个中断是送给guest os处理的,它会设置一个虚拟中断,将物理中断和虚拟中断连接在一起,把这个虚拟中断加入到virtual CPU interface。
virtual CPU interface会根据hypervisor加入的虚拟中断向guest os发送一个中断
guest os通过virtual CPU interface发来的中断进行处理,处理之后返回
virtual CPU interface发现这个虚拟中断来自于一个物理中断,就会在Dirtributor上清除这个物理中断(表示处理完毕),整个虚拟中断处理过程结束。
这里面还涉及一个硬件扩展,论文上把它称为“priority drop”。正常情况下,当一个中断正在处理的时候,低优先级的中断是不能够抢占处理器的,但是在虚拟化环境却不是这样,比方说有两个guest os,我们暂且称之为os1和os2,假设os1正在处理一个高优先级中断,这时又有一个中断是给os2处理的,这个中断的优先级低于os1的中断的优先级,但是它们应该互不影响才对。ARM加入这个硬件扩展就是为了处理上述问题,每个guest os都有自己的优先级屏蔽策略,互不影响。