// Tennimate类
class Tennimate{
public:
// 提供电机的转向控制引脚,电机速度控制引脚, 测距传感器引脚参数以及舵机控制引脚参数的构造函数
Tennimate(int ENA_pin, int In1_pin, int In2_pin, int In3_pin, int In4_pin, int ENB_pin, byte M_Speed,int trigPin, int echoPin, int servoPin);
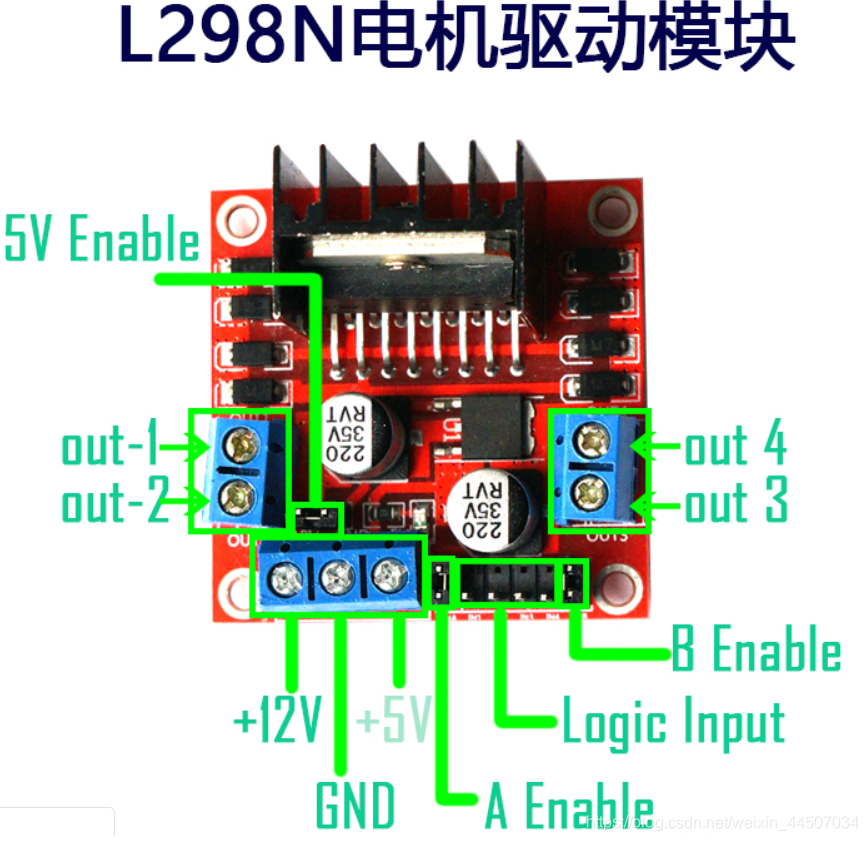
int ENA; //L298N上的ENA引脚
int In1; //L298N上的In1引脚
int In2; L298N上的In2引脚
int ENB;
int In3;
int In4;
int hcTrig; // 超声测距传感器Trig引脚
int hcEcho; // 超声测距传感器Echo引脚
long duration, cm; // 超声测距传感器用变量
};
#endif
.cpp:
#include "Tennimate.h"
// 提供电机的转向控制引脚,电机速度控制引脚, 测距传感器引脚参数以及舵机控制引脚参数的构造函数
Tennimate::Tennimate(int ENA_pin, int In1_pin, int In2_pin, int In3_pin, int In4_pin, int ENB_pin, byte M_Speed,int trigPin, int echoPin, int servoPin)
{
// Tennimate类
class Tennimate{
public:
// 提供电机的转向控制引脚,电机速度控制引脚, 测距传感器引脚参数以及舵机控制引脚参数的构造函数
Tennimate(int ENA_pin, int In1_pin, int In2_pin, int In3_pin, int In4_pin, int ENB_pin, byte M_Speed,int trigPin, int echoPin, int servoPin);
int ENA; //L298N上的ENA引脚
int In1; //L298N上的In1引脚
int In2; L298N上的In2引脚
int ENB;
int In3;
int In4;
int hcTrig; // 超声测距传感器Trig引脚
int hcEcho; // 超声测距传感器Echo引脚
long duration, cm; // 超声测距传感器用变量
};
#endif
.cpp:
#include "Tennimate.h"
// 提供电机的转向控制引脚,电机速度控制引脚, 测距传感器引脚参数以及舵机控制引脚参数的构造函数
Tennimate::Tennimate(int ENA_pin, int In1_pin, int In2_pin, int In3_pin, int In4_pin, int ENB_pin, byte M_Speed,int trigPin, int echoPin, int servoPin)
{


 举报
举报



